
本文根據(jù)正弦電流細(xì)分驅(qū)動的原理,設(shè)計出三相混合式多細(xì)分步進(jìn)電機(jī)驅(qū)動器。系統(tǒng)采用電流跟跟蹤和脈寬調(diào)制技術(shù),使用電機(jī)的相電流為相位相差120°的正弦波。該驅(qū)動器解決了傳統(tǒng)步進(jìn)電機(jī)低速振動大、有共振區(qū)、噪音大等缺點(diǎn),提高了步距角分辨率和驅(qū)動器的可靠性。
步進(jìn)電機(jī)是一種開環(huán)伺服運(yùn)動系統(tǒng)執(zhí)行元件,以脈沖方式進(jìn)行控制,輸出角位移。與交流伺服電機(jī)及直流伺服電機(jī)相比,其突出優(yōu)點(diǎn)就是價格低廉,并且無積累誤差。但是,步進(jìn)電機(jī)運(yùn)行存在許多不足之處,如低頻振蕩、噪聲大、分辨率不高等到,又嚴(yán)重制約了步進(jìn)電機(jī)的應(yīng)用范圍。步進(jìn)電機(jī)的運(yùn)行性能與它的驅(qū)動的應(yīng)用范圍。步進(jìn)電機(jī)的運(yùn)行性能與它的驅(qū)動器有密切的聯(lián)系,可以通過驅(qū)動技術(shù)的改進(jìn)來克服步進(jìn)電機(jī)的缺點(diǎn)。相對于其他的驅(qū)動方式,細(xì)分驅(qū)動方式不僅可以減小步進(jìn)電機(jī)的步距角,提高分辨庇,而且還可以減小步進(jìn)電機(jī)的步距角,提高分辨率,而且還可以減少或消除低頻振動,使電機(jī)運(yùn)行更加平穩(wěn)均勻。總體來說,細(xì)分驅(qū)動的控制效果最好。因?yàn)槌S玫投瞬竭M(jìn)電機(jī)伺服系統(tǒng)沒有編碼器反饋,所以隨著電機(jī)速度的升高其內(nèi)部控制電流相應(yīng)減小,從而造成丟步現(xiàn)象。所以在速度和精度要求不高的領(lǐng)域,其應(yīng)用非常廣泛。
因?yàn)槿嗷旌鲜讲竭M(jìn)電機(jī)比二相步進(jìn)電機(jī)有更好的低速平穩(wěn)性及輸出力矩,所以三相混合式步進(jìn)電機(jī)比二相步進(jìn)電機(jī)有更好應(yīng)用前景。傳統(tǒng)的三相混合式步進(jìn)電機(jī)控制方法都是以硬件比較器完成,本文主要講述使用DSP及空間矢量算法SVPWM來實(shí)現(xiàn)三相混合式步進(jìn)電機(jī)的控制。
細(xì)分原理
步進(jìn)電機(jī)的細(xì)分控制從本質(zhì)上講是通過對步進(jìn)電機(jī)的定子繞組中電流的控制,使步進(jìn)電機(jī)內(nèi)部的合成磁場按某種要求變化,從而實(shí)現(xiàn)步進(jìn)電機(jī)步距角的細(xì)分。最佳的細(xì)分方式是恒轉(zhuǎn)矩等步距角的細(xì)分。一般情況下,合成磁場矢量的幅值決定了電機(jī)旋轉(zhuǎn)力矩的大小,相鄰兩合成磁場矢量的之間的夾角大小決定了步距角的大小。在電機(jī)內(nèi)產(chǎn)生接近均勻的圓形旋轉(zhuǎn)磁場,各相繞組的合成磁場矢量,即各相繞組電流的合成矢量應(yīng)在空間作幅值恒定的旋轉(zhuǎn)運(yùn)動,這就需要在各相繞相中通以正弦電流。
三相混合式步進(jìn)電機(jī)的工作原理十分類似于永磁同步伺服電機(jī)。其轉(zhuǎn)子上所用永磁磁鐵同樣是具有高磁密特性的稀土永磁材料,所以在轉(zhuǎn)子上產(chǎn)生的感應(yīng)電流對轉(zhuǎn)子磁場的影響可忽略不計。在結(jié)構(gòu)上,它相當(dāng)于一種多極對數(shù)的交流永磁同步電機(jī)。由于輸入是三相正弦電流,因此產(chǎn)生的空間磁場呈圓形分布,而且可以用永磁式同步電機(jī)的結(jié)構(gòu)模型(見圖1)分析三相混合式步進(jìn)電機(jī)的轉(zhuǎn)矩特性。為便于分析,可做如下假設(shè):
·電機(jī)定子三相繞組完全對稱;
·磁飽和、渦流及鐵心損耗忽略不計;
·激磁電流無動態(tài)響應(yīng)過程。

U、V、W為定子上的3個線圈繞組,3個線圈繞組的軸線互差120°。電機(jī)單相繞組通電的時候,穩(wěn)態(tài)轉(zhuǎn)矩可以表達(dá)為:
T=f(i,θ)
式中:i為繞組中通過的電流;
θ為電機(jī)轉(zhuǎn)子偏離參考點(diǎn)的角度。
由于磁飽和效應(yīng)可以忽略不計,并且轉(zhuǎn)子結(jié)構(gòu)是圓形,其矩角特性為嚴(yán)格的正弦,即
T=kIKsin(θ)
式中,k為轉(zhuǎn)矩常數(shù)。
若理想的電流源以恒幅值為I的三相平衡電流iU、iV、iW供給電機(jī)繞組,即:
iU=Isin(ωt)
iV =Isin(ωt-2π/3)
iW=Isin(ωt+2π/3)
則電機(jī)各相電流產(chǎn)生的穩(wěn)態(tài)轉(zhuǎn)矩為:
TU=kIsin(θ)
TV=kIsin(θ-2π/3)
TW= kIsin(θ+2π/3)
穩(wěn)態(tài)運(yùn)行時,θ=ωt,則三相繞組產(chǎn)生的合成轉(zhuǎn)矩為:
T=TU+TV+TW=(3/2)kIsin(π/2-ωt+θ)kI
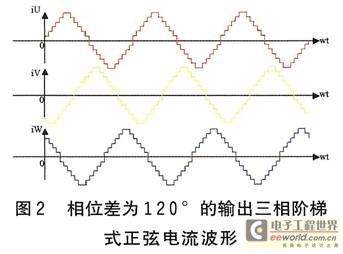
以上分析表明,對于三相永磁同步電機(jī),當(dāng)三相繞組輸入三相對稱的正弦電流時,由于在內(nèi)部產(chǎn)生圓形旋轉(zhuǎn)磁場,電機(jī)的輸出轉(zhuǎn)矩為恒值。因此,將交流伺服控制原理應(yīng)用到三相混合式步進(jìn)電機(jī)驅(qū)動系統(tǒng)中,輸入的220V交流,經(jīng)整流后變?yōu)橹绷鳎俳?jīng)脈寬調(diào)制技術(shù)變?yōu)槿冯A梯式正弦波形電流(見圖2),它們按固定時序分別流過三路繞組,其每個階梯對應(yīng)電機(jī)轉(zhuǎn)動一步。通過改變驅(qū)動器輸出正弦電流的頻率來改變電機(jī)轉(zhuǎn)速,而輸出的階梯數(shù)確定了每步轉(zhuǎn)過的角度,當(dāng)角度越小的時候,那么其階梯數(shù)就越多,即細(xì)分就越大,從理論上說此角度可以設(shè)得足夠的小,所以細(xì)分?jǐn)?shù)可以是很大,而交流伺服控制的每步角度與反饋的編碼器的精度有很大的關(guān)系,一般使用的為2500線,所以每一步轉(zhuǎn)過的角度僅為0.144°(即360/2500),而此方法控制的步進(jìn)電機(jī),比如其細(xì)分?jǐn)?shù)為10000,則每一步轉(zhuǎn)過的角度為0.036°,所以比一般的伺服控制精度高很多。當(dāng)然,步進(jìn)電機(jī)轉(zhuǎn)動時,電機(jī)各相繞組的電感將形成一個反向電動勢,頻率越高,反向電動勢越大。在它的作用下,電機(jī)隨頻率(或速度)的增大而相電流減小,從而導(dǎo)致力矩下降,通過恒流方式可以使在電機(jī)低頻和高頻時保持同樣的相電流從而使高頻的力矩特性有所改善,這只能是在低速時,所以其綜合性能(高、低速噪聲,高速力矩,高速平穩(wěn)性等)很難趕超交流伺服控制系統(tǒng)。
三相混合式步進(jìn)電機(jī)一般把三相繞組連接成星形或者三角形,按照電路基本定理,三相電流之和為零。即iU+iV+iW=0。所以通常只需產(chǎn)生兩相繞組的給定信號,第三相繞組的給定信號可由其它兩相求得。同樣,只需要對相應(yīng)兩相繞組的實(shí)際電流進(jìn)行采樣,第三相繞組的實(shí)際電流可根據(jù)式求得。
三相混合式步進(jìn)電機(jī)驅(qū)動器的系統(tǒng)構(gòu)成
驅(qū)動器的總體方案如圖3所示,主要包括單片機(jī)電路、電流追蹤型SPWM電路和功率驅(qū)動電路組成。
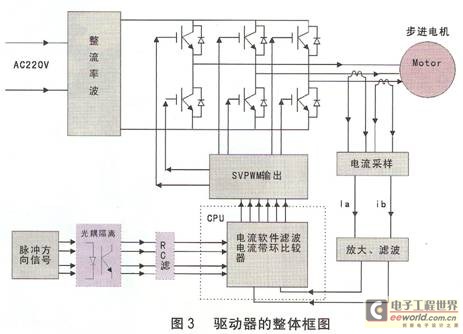
DSP模塊設(shè)計
在這里,筆者選擇了TI公司的DSP作為CPU芯片,DSP(Digital Signal Processor)實(shí)際上也是一種單片機(jī),它同樣是將中央處理單元、控制單元和外圍設(shè)備集成到一塊芯片上。但它又有自身鮮明的特點(diǎn)——因?yàn)椴捎昧硕嘟M總線技術(shù)實(shí)現(xiàn)并行運(yùn)行的機(jī)制,從而大大提高了運(yùn)算速度,具有更強(qiáng)的運(yùn)算能力和更好的實(shí)時性。本文選用的DSP(TMS320LF2407A)是一款電機(jī)控制專用芯片,144引腳,具有豐富的IO資源,含有4個通用定時器,具有兩路專用于控制三相電機(jī)的PWM發(fā)生器(可產(chǎn)生六路PWM信號),另外還有專用接收外部脈沖和方向的I/O口,從而簡化了電路設(shè)計和程序開發(fā)。
DSP輸入信號包括步進(jìn)脈沖信號CP、方向控制信號、脫機(jī)信號,過流保護(hù)信號。這幾種信號均通過高速光耦連接到DSP的引腳上,另外還有細(xì)分步數(shù)及電流選擇信號。當(dāng)脫機(jī)信號為有效時,驅(qū)動器輸出到電機(jī)的電流被切斷,電機(jī)轉(zhuǎn)子處于自由狀態(tài)(脫機(jī)狀態(tài))。反饋電流通過DSP自帶的10位模數(shù)轉(zhuǎn)換器(AD)采樣,反饋的電流通過一定的算法后,由DSP自帶的PWM口輸出控制電機(jī)。
電流追蹤型回路
這種傳輸方式以模擬電壓的幅值代表采樣電流或者電壓的大小,其主要用來采樣a,b兩相電流及母線電壓檢測,實(shí)現(xiàn)電機(jī)電流控制以及過壓、欠壓、過流保護(hù)。驅(qū)動器通過采樣電阻檢測步進(jìn)電機(jī)繞組的實(shí)際電流,與設(shè)定電流相比較后經(jīng)過滯環(huán)比較器調(diào)節(jié)器,調(diào)節(jié)器輸出信號經(jīng)過滯環(huán)比較器調(diào)節(jié)器,調(diào)節(jié)器輸出信號由20kHz頻率的三角波輸出,形成空間矢量脈寬調(diào)制信號(SVPWM),通過功率驅(qū)動接口電路來控制大功率半導(dǎo)體器件的導(dǎo)通與關(guān)斷,使步進(jìn)電機(jī)的繞組實(shí)際電流跟蹤給定參考信號,按給定的正弦規(guī)律變化。
功率驅(qū)動電路
驅(qū)動器的主回路采用交—直—交電壓型逆變器形式,由整流濾波電路、三相逆變器以及步進(jìn)電機(jī)等組成。整流濾波電路構(gòu)成直流電壓源,完成200V、50Hz交流電源到直流電源的變換。逆變器實(shí)現(xiàn)從直流電到變頻變壓交流電的轉(zhuǎn)換,為三相混合式步進(jìn)電機(jī)的定子繞組提供要求的交流電流。逆變器由仙童公司生產(chǎn)的六只G30N60B3DMOS管組成,構(gòu)成三相逆變橋,驅(qū)動器采用兩只電阻檢測步進(jìn)電機(jī)相電流的瞬時值。功率驅(qū)動電路的核心是功率模塊(MOS管),MOS管與電流追蹤型PWM輸出之間必須通過專用高速光耦連接,根據(jù)MOS管的過流值和電機(jī)峰值線電流的峰值小于MOS管的最大電流值。本設(shè)計中電機(jī)最大相電流為8.1A,該電流是相電流的有效值,峰值相電流為11.312A(即8.1sqrt(2))。此外,電機(jī)繞組在三角形接法時,線電流是相電流的三倍,所以線電流峰值為19.6A。由G30N60B3D PDF文檔知,其最大流值為30A,故可以保證正常使用。正常工作要求適當(dāng)?shù)纳嵩O(shè)計保證內(nèi)部結(jié)溫永遠(yuǎn)小于150℃,因此要外加散熱器并強(qiáng)制風(fēng)冷,以保證MOS管正常工作。
并口通訊
為了避免在控制過程中停電或者其它特別原因掉電時造成損失,使用帶電RAM存儲電機(jī)位置,保證來電后工件可繼續(xù)完成加。并口RAM比傳統(tǒng)使用的E2PROM速度傳輸更快更可靠,可更有效的記錄電機(jī)運(yùn)行狀態(tài),但占用的I/O口較多,這里CPU有足夠的資源可以使用。
控制軟件流程
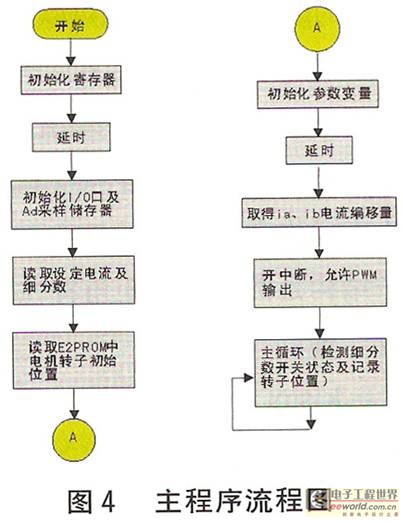
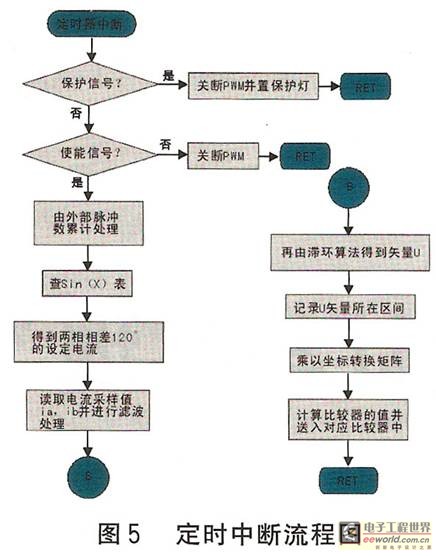
圖4示出主程序流程圖,圖5示出定時中斷流程圖。為減少功耗和保護(hù)電機(jī),設(shè)置了自動半電流功能(靜態(tài)鎖軸或沒有脈沖輸入時電流減半),它由滯環(huán)比較器自動進(jìn)行調(diào)節(jié)。
性能指標(biāo)及目前的應(yīng)用情況
設(shè)計后所達(dá)到的性能指標(biāo):
·輸入交流電壓可為90V~275V;
·輸入信號采用光電隔離;
·采用IGBT為輸出級的功率電子開關(guān);
·SVPWM(正弦空間矢量脈寬調(diào)制),三相恒流標(biāo)準(zhǔn)正弦波輸出,三角載波頻率為20kHz;
·自動半電流鎖定;
·斷電保護(hù)功能(斷電自動相位記憶功能);
·電流控制靈活可選(2.0A~8.1A),適配86、90、110、130座號的三相各系列電機(jī);
·脫機(jī)(FREE)功能;
·噪音低、發(fā)熱量小、效率高、運(yùn)行特性良好;
·本驅(qū)動器為單脈沖(P+D)控制模式;
·目前所做的最大細(xì)分?jǐn)?shù)為16000p/r,最小為600p/r,主要由用戶而定,可以做得更小也可以做得更大。
結(jié)語
實(shí)踐證明本文所講的驅(qū)動方法其適應(yīng)性很強(qiáng),基本上可以適應(yīng)所有的三相混合式步進(jìn)電機(jī)。特別對三相繞組星形接法,低頻時運(yùn)行平穩(wěn),無振蕩,有效地抑制了振蕩、噪音。另外,驅(qū)動器內(nèi)部設(shè)計多種保護(hù)電路,使整個驅(qū)動器的可靠性大大提高。