
1 引 言
隨著現(xiàn)代科學(xué)技術(shù)的發(fā)展,PLC己廣泛地應(yīng)用于工業(yè)控制微型計(jì)算機(jī)中。
目前,工業(yè)機(jī)器人關(guān)節(jié)主要是采用交流伺服系統(tǒng)進(jìn)行控制,本研究將技術(shù)成熟、編程方便、可靠性高、體積小的SIEMENS S-200可編程控制器 ,應(yīng)用于可控環(huán)流可逆調(diào)系統(tǒng),研制出機(jī)器人關(guān)節(jié)直流伺服系統(tǒng),用以對(duì)工業(yè)機(jī)器人關(guān)節(jié)進(jìn)行伺服控制。
2 工業(yè)機(jī)器人關(guān)節(jié)直流伺服系統(tǒng)
工業(yè)機(jī)器人關(guān)節(jié)是由直流伺服電機(jī)驅(qū)動(dòng),通過環(huán)流可逆調(diào)速系統(tǒng)控制電機(jī)的正反轉(zhuǎn)來達(dá)到對(duì)工業(yè)機(jī)器人關(guān)節(jié)的伺服控制的目的。
2.1 控制系統(tǒng)結(jié)構(gòu)
系統(tǒng)采用SIEMEN S7-200型PLC, 外加D/A數(shù)模轉(zhuǎn)換模塊,將PLC數(shù)字信號(hào)變成模擬信號(hào),通過BT—I變流調(diào)速系統(tǒng)(主要由轉(zhuǎn)速調(diào)節(jié)器ASR、電流調(diào)節(jié)器ACR、環(huán)流調(diào)節(jié)器ARR,正組觸發(fā)器GTD、反組觸發(fā)器GTS、電流反饋器TCV組成)驅(qū)動(dòng)直流電機(jī)運(yùn)轉(zhuǎn),驅(qū)動(dòng)機(jī)器人關(guān)節(jié)按控制要求進(jìn)行動(dòng)作。系統(tǒng)結(jié)構(gòu)如圖1所示。
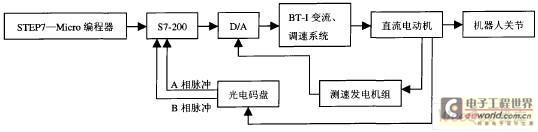
圖1 機(jī)器人關(guān)節(jié)直流伺服系統(tǒng)結(jié)構(gòu)示意圖
2.2 系統(tǒng)工作原理
系統(tǒng)原理如圖2所示,可控環(huán)流可逆調(diào)速系統(tǒng)的主電路采用交叉聯(lián)接方式,整流變壓器的一個(gè)副邊繞組接成Y型,另一個(gè)接成△ 型,2個(gè)交流電源的相位錯(cuò)開30°,其環(huán)流電壓的頻率為l2倍工頻。為了抑交流環(huán)流,在2組可控整流橋之間接放了2只均衡電抗器,電樞回路中仍保留一只平波電抗器。
控制電路主要由轉(zhuǎn)速調(diào)節(jié)器ASR、電流調(diào)節(jié)器ACR、環(huán)流調(diào)節(jié)器ARR, 正組觸發(fā)器GTD、反組觸發(fā)器GTS、電流反饋器TCV組成(見圖2),其中2組觸發(fā)器的同步信號(hào)分別取自與整流變壓器相對(duì)應(yīng)的同步變壓器。

圖2 工業(yè)機(jī)器人關(guān)節(jié)直流伺服系統(tǒng)原理圖
系統(tǒng)給定為零時(shí),轉(zhuǎn)速調(diào)節(jié)器ASR、電流調(diào)節(jié)器ACR被零速封鎖信號(hào)鎖零。此時(shí),系統(tǒng)主要由環(huán)流調(diào)節(jié)器ARR組成交叉反饋的恒流系統(tǒng)。由于環(huán)流給定的影響,2組可控硅均處于整流狀態(tài),輸出的電壓大小相等、極性相反,直流電機(jī)電樞電壓為零,電機(jī)停轉(zhuǎn),輸出的電流流經(jīng)2組可控硅形成環(huán)流。環(huán)流不宜過大,一般限制在電機(jī)額定電流的5%左右。正向啟動(dòng)時(shí),隨著轉(zhuǎn)速信號(hào)Ugn的增大,封鎖信號(hào)解除,轉(zhuǎn)速調(diào)節(jié)器ASR輸正, 電機(jī)正向運(yùn)行。此時(shí),正組電流反饋電壓+Ufi2反映電機(jī)電樞電流與環(huán)流電流之和; 反組電流反饋電壓-Uril反映了電樞電流, 因此可以對(duì)主電流進(jìn)行調(diào)節(jié)。而正組環(huán)流調(diào)節(jié)器輸入端所加的環(huán)流給定信號(hào)-Ugih和交叉電流反饋信號(hào)-Ufil對(duì)這個(gè)調(diào)節(jié)過程影響極小。反組環(huán)流調(diào)節(jié)器的輸入電壓為(+Uk)+(-Ugih)+(Ufi2),隨著電樞電流的不斷增大,當(dāng)達(dá)到一定程度時(shí),環(huán)流自動(dòng)消失,反組可控硅進(jìn)入待逆變狀態(tài)。反向啟動(dòng)時(shí)情況相反。另外,可控環(huán)流可逆調(diào)速系統(tǒng)制動(dòng)時(shí)仍然具有本橋逆變,反接制動(dòng)和反饋制動(dòng)等過程。由于啟動(dòng)過程也是環(huán)流逐漸減小的過程, 因此, 電機(jī)停轉(zhuǎn)時(shí),系統(tǒng)的環(huán)流達(dá)最大值。環(huán)流有助于系統(tǒng)越過切換死區(qū),改善過渡特性。
3 系統(tǒng)程序設(shè)計(jì)
程序設(shè)計(jì)方案為手動(dòng)輸入一個(gè)角度值,讓電機(jī)轉(zhuǎn)動(dòng),通過與電動(dòng)機(jī)相聯(lián)的光電碼盤來檢測(cè)電動(dòng)機(jī)轉(zhuǎn)的角度,將轉(zhuǎn)動(dòng)角度變成脈沖信號(hào)。由于電動(dòng)機(jī)的轉(zhuǎn)速非常快,所以只能把脈沖信號(hào)送往PLC的高速計(jì)數(shù)器。然后將計(jì)數(shù)器的脈沖記錄與手輸入的進(jìn)行比較,如果兩者相等說明電動(dòng)機(jī)已經(jīng)到達(dá)指定角度位置,否則繼續(xù)進(jìn)行修正。值得注意的是,由于電動(dòng)機(jī)從轉(zhuǎn)動(dòng)突變到停止會(huì)有一定的慣性, 因此在進(jìn)行信號(hào)比較時(shí)應(yīng)允許有一定的誤差,不然電動(dòng)機(jī)就會(huì)始終處在修正位置狀態(tài)。系統(tǒng)程序框圖如圖3所示。
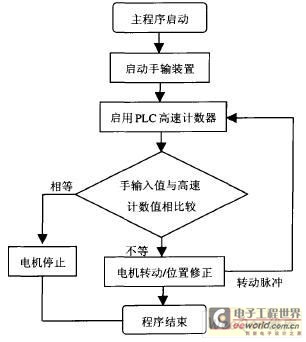
圖3 系統(tǒng)程序框圖
4 結(jié) 論
基于PLC研制的直流伺服系統(tǒng),利用PLC擴(kuò)展能力強(qiáng)的特點(diǎn),添裝手動(dòng)輸放裝置,實(shí)現(xiàn)工業(yè)機(jī)器人關(guān)節(jié)直流伺服系統(tǒng)的可視操作。其優(yōu)點(diǎn)是:(1)無需改變電路結(jié)構(gòu),即可通過程序?qū)崿F(xiàn)電機(jī)正反轉(zhuǎn)的控制;(2)能夠使電機(jī)不等待停止轉(zhuǎn)動(dòng)即可立刻反方向轉(zhuǎn)動(dòng);(3)可令電機(jī)急停,避免電機(jī)慣性轉(zhuǎn)動(dòng);(4)編程、維護(hù)方便。