
海底智能封堵器水聲通信系統(tǒng)的設(shè)計(jì)
中電網(wǎng)
張海英
摘要: 智能封堵器應(yīng)用于海底管道的維修作業(yè)時(shí),首先要解決的是在深海處如何實(shí)現(xiàn)平臺(tái)母船與管道之間的即時(shí)通信。本文研究的是從海上平臺(tái)發(fā)出的數(shù)據(jù)指令信號(hào)到達(dá)管道上方接收器之間的通信過(guò)程。
Abstract:
Key words :
0 海底智能封堵器水聲通信概述
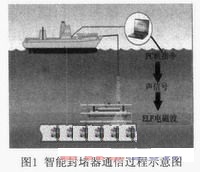
智能封堵器應(yīng)用于海底管道的維修作業(yè)時(shí),首先要解決的是在深海處如何實(shí)現(xiàn)平臺(tái)母船與管道之間的即時(shí)通信。本文研究的是從海上平臺(tái)發(fā)出的數(shù)據(jù)指令信號(hào)到達(dá)管道上方接收器之間的通信過(guò)程。由于海底環(huán)境的特殊性,故采用水聲無(wú)線(xiàn)通信方式。智能封堵器通信信號(hào)流程如圖1所示。計(jì)算機(jī)指令信息首先轉(zhuǎn)換成聲信號(hào)在海洋環(huán)境下傳輸,最后轉(zhuǎn)換成ELF電磁波信號(hào),利用電磁波信號(hào)穿透泥土、海水、管壁,指導(dǎo)管道內(nèi)的智能封堵器工作。
智能封堵器海底通信中的水聲通信系統(tǒng)部分主要研究的是從母船或平臺(tái)計(jì)算機(jī)操作界面發(fā)出指令數(shù)據(jù),將數(shù)字信號(hào)經(jīng)由Modem轉(zhuǎn)換調(diào)制成模擬信號(hào),經(jīng)過(guò)功率放大匹配電路,送至水聲換能器,轉(zhuǎn)換成聲信號(hào)。
1 水聲通信系統(tǒng)的總體結(jié)構(gòu)設(shè)計(jì)
用于海底管道的智能封堵器,要攻克的技術(shù)難關(guān)之一是如何實(shí)現(xiàn)智能封堵器的水上水下通訊,以完成平臺(tái)的遙控操作。由于海洋環(huán)境的特殊性,故采用了水聲無(wú)線(xiàn)通信方式。水聲通信系統(tǒng)的設(shè)計(jì)方法通常取決于系統(tǒng)為克服多徑干擾和相位起伏所采用的不同技術(shù)。這些技術(shù)可分為兩個(gè)方面:一是對(duì)信號(hào)的設(shè)計(jì),即系統(tǒng)調(diào)制/解調(diào)的方案設(shè)計(jì);二是發(fā)射/接收設(shè)備的結(jié)構(gòu),即系統(tǒng)的幀處理及均衡方案的設(shè)計(jì)。根據(jù)對(duì)目前已有的水聲通訊技術(shù)的調(diào)研和智能封堵器的實(shí)際應(yīng)用環(huán)境和特點(diǎn);本文提出了如圖2所示的水聲通訊方案。整套通訊系統(tǒng)主要由海上控制中心、外部通訊鏈路、以及遙控執(zhí)行機(jī)構(gòu)三個(gè)邏輯子系統(tǒng)組成。該系統(tǒng)主要是基于聲波和超低頻電磁波來(lái)進(jìn)行雙向通訊。
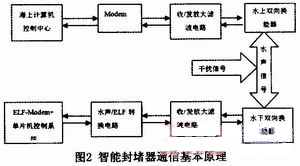
此通訊系統(tǒng)分為水上收/發(fā)和水下收/發(fā)通訊系統(tǒng)兩部分。水上部分由計(jì)算機(jī)、Modem、收/發(fā)濾波放大電路和雙向換能器組成,水下部分由水下雙向換能器、收/發(fā)放大濾波電路、水聲/ELF轉(zhuǎn)換電路和ELF-Modem+單片機(jī)控制系統(tǒng)組成。因?yàn)樾盘?hào)均為收/發(fā)雙向傳遞,所以采用雙向換能器,雙向換能器內(nèi)部既有發(fā)射器又有水聽(tīng)器,既可發(fā)送聲波信號(hào)又可接收聲波信號(hào)。經(jīng)過(guò)調(diào)研和選型,筆者采用的水聲發(fā)射換能器是淺海圓柱型壓電陶瓷換能器FSQ-37。
Modem將計(jì)算機(jī)指令信息調(diào)制成換能器工作頻帶上的電信號(hào),此電信號(hào)經(jīng)過(guò)功率放大后送給水上雙向換能器發(fā)射,經(jīng)換能器發(fā)射后變?yōu)槁暡ㄐ盘?hào)在水中傳輸,水下雙向換能器接收到聲波信號(hào)后再將其轉(zhuǎn)換為電信號(hào),由于信號(hào)在水中傳輸?shù)倪^(guò)程中會(huì)有所衰減,并伴隨著一些干擾,所以這個(gè)轉(zhuǎn)換后的電信號(hào)必須經(jīng)過(guò)放大濾波后再經(jīng)水聲/ELF轉(zhuǎn)換電路轉(zhuǎn)換成ELF電磁波信號(hào)發(fā)射,ELF電磁波信號(hào)可穿透泥土、海水和管壁被管道內(nèi)的ELF-Modem+單片機(jī)控制系統(tǒng)所接收,經(jīng)ELF-Modem解調(diào)后變成邏輯電平指令送給單片機(jī),單片機(jī)將收到的指令解析后控制封堵器完成各種動(dòng)作,這樣就完成了一次信號(hào)的單向傳輸。
此外,封堵器在執(zhí)行指令過(guò)程中,其上的傳感器將檢測(cè)到的信號(hào)傳送給單片機(jī),管道內(nèi)的單片機(jī)將這些溫度、壓力和封堵器狀態(tài)等數(shù)據(jù)送回海上的計(jì)算機(jī)進(jìn)行監(jiān)測(cè)和計(jì)算,這樣計(jì)算機(jī)就可以了解封堵器的運(yùn)行情況,并根據(jù)反饋信號(hào)隨時(shí)調(diào)整控制指令。這個(gè)信息的傳送過(guò)程是先由單片機(jī)將邏輯電信號(hào)送給ELF-Modem,經(jīng)ELF-Modem調(diào)制后變?yōu)镋LF電磁波穿過(guò)管壁,被水聲/ELF轉(zhuǎn)換電路接收后轉(zhuǎn)換為換能器工作頻帶上的電信號(hào),此電信號(hào)再經(jīng)過(guò)功率放大后送給水下雙向換能器,發(fā)射器發(fā)射的聲波信號(hào)由下至上在水中傳輸,到達(dá)水上后被水上的換能器接收并變?yōu)殡娦盘?hào),經(jīng)過(guò)放大送給Modem解調(diào)后再送給計(jì)算機(jī),完成由海底到海面的單方向傳輸。為實(shí)現(xiàn)全雙工的傳輸,水聲和ELF通訊都分別使用雙信道進(jìn)行通訊,即收/發(fā)采用不同的信道。
水聲通訊的關(guān)鍵在于實(shí)現(xiàn)基于Modem的水聲調(diào)制解調(diào)技術(shù),以便可靠地收/發(fā)數(shù)據(jù)。在通訊系統(tǒng)方案確定之后,進(jìn)行水試試驗(yàn)找到最佳發(fā)射、接收頻率作為水下通信傳輸?shù)妮d波頻率。水上PC機(jī)的人機(jī)交互程序和串行通信程序采用Visual Basic 6.0編寫(xiě)。采用FSK方式傳送數(shù)字信息控制載波的頻率,將數(shù)字信息調(diào)制到水聲換能器的工作頻帶上,推動(dòng)水聲換能器把電能轉(zhuǎn)化為聲波發(fā)射出去。
2 通信試驗(yàn)線(xiàn)路的搭建
考慮到自制一個(gè)Modem不僅要重新設(shè)計(jì)和調(diào)試電路,而且還要編寫(xiě)復(fù)雜的通訊協(xié)議,因此通訊所用的Modem為T(mén)P-LINK的TM-EC5658V外置式Modem,這種Modem技術(shù)成熟,編程方便,編寫(xiě)計(jì)算機(jī)到Modem之間的通訊程序,可利用Ⅶ中的MSComm控件來(lái)實(shí)現(xiàn)。又由于這種Modem的通訊協(xié)議是開(kāi)放式的,因此即使是用單片機(jī)也可較容易地編寫(xiě)單片機(jī)至Modem之間的通訊程序。雖然使用成品的Modem給編程帶來(lái)了方便,但是由于成品的Modem的工作載頻在300~3400Hz,一般采用FSK調(diào)制方法時(shí),用特殊的音頻范圍來(lái)區(qū)別發(fā)送數(shù)據(jù)和接收數(shù)據(jù)。如調(diào)頻Modem發(fā)送和接收數(shù)據(jù)的二進(jìn)制邏輯信號(hào)被指定的專(zhuān)用頻率是:發(fā)送時(shí)信號(hào)邏輯0的頻率為1070Hz,信號(hào)邏輯1的頻率為1270Hz,接收時(shí)信號(hào)邏輯0的頻率為2025Hz,信號(hào)邏輯1的頻率為2225Hz。這樣的調(diào)制頻率與換能器的工作頻帶相差較遠(yuǎn),本文所選用的FSQ-37換能器的頻帶寬度在20~46kHz之間,很明顯,從Modem出來(lái)的載波信號(hào)不能直接送給換能器,必須經(jīng)過(guò)變頻后轉(zhuǎn)換到換能器的工作頻帶,再經(jīng)過(guò)放大濾波后送給換能器轉(zhuǎn)換為聲波信號(hào)進(jìn)行發(fā)射。因此在Modem和濾波放大電路之間還要設(shè)計(jì)一個(gè)變頻器用來(lái)轉(zhuǎn)換Modem和換能器的發(fā)射頻率。考慮到以上因素后海上部分的通訊鏈路的搭建如圖4所示:

在圖4中計(jì)算機(jī)發(fā)出的信號(hào)通過(guò)RS-232送給Modem,經(jīng)Modem調(diào)制后把計(jì)算機(jī)信息變?yōu)槟M量,送給變頻器,變頻器將Modem的調(diào)制信號(hào)轉(zhuǎn)換為換能器的工作頻率后再送給濾波放大電路,驅(qū)動(dòng)換能器發(fā)射聲信號(hào)將數(shù)據(jù)信息傳送至海底。
由于本文不涉及ELF通訊方式,所以在搭建海下接收通訊鏈路時(shí)作了部分簡(jiǎn)化,海底接收端的模擬通訊鏈路如圖5所示。

在圖5中,海底的換能器將收到的聲波信號(hào)轉(zhuǎn)換為電信號(hào),經(jīng)濾波放大后送給變頻器轉(zhuǎn)換為Modem的載頻信號(hào),Modem將收到信號(hào)解調(diào)后送至單片機(jī),完成一次單項(xiàng)數(shù)據(jù)信息傳輸。從單片機(jī)向計(jì)算機(jī)逆向傳輸信息的原理與上述原理相同,只是信息的發(fā)起端不同而已。
3 單片機(jī)的選型
由于海底封堵維修工作時(shí)的長(zhǎng)時(shí)間、供電條件限制等制約因素,因此單片機(jī)的選型,主要從單片機(jī)工作的可靠性、節(jié)能性、工作速度和通訊接口的設(shè)計(jì)出發(fā)。經(jīng)過(guò)調(diào)研選擇ATMEL公司的ATmega系列高性能、低功耗的8位AVR微處理器ATmegal69,ATmega169具有以下特性:
(1)先進(jìn)的RISC結(jié)構(gòu)。130條指令,大多數(shù)指令執(zhí)行時(shí)間為單個(gè)時(shí)鐘周期;32個(gè)8位通用工作寄存器;全靜態(tài)工作;工作于16MHz時(shí)性能高達(dá)16MIPS;只需兩個(gè)時(shí)鐘周期的硬件乘法器。
(2)非易失性程序和數(shù)據(jù)存儲(chǔ)器。16k字節(jié)的系統(tǒng)內(nèi)可編程Flash;擦寫(xiě)壽命:10000次;具有獨(dú)立鎖定位的可選Boot代碼區(qū);通過(guò)片上Bo-ot程序?qū)崿F(xiàn)系統(tǒng)內(nèi)編程;真正的同時(shí)讀寫(xiě)操作;512字節(jié)的EEPROM;擦寫(xiě)壽命:100000次;1k字節(jié)的片內(nèi)SRAM。
(3)可以對(duì)鎖定位進(jìn)行編程以實(shí)現(xiàn)用戶(hù)程序的加密。JTAG接口(與IEEE1149.1標(biāo)準(zhǔn)兼容);符合JTAG標(biāo)準(zhǔn)的邊界掃描功能;支持?jǐn)U展的片內(nèi)調(diào)試功能;通過(guò)JTAG接口實(shí)現(xiàn)對(duì)Flash、EEPROM、熔絲位和鎖定位的編程。
(4)外設(shè)特點(diǎn)。4×25段的LCD驅(qū)動(dòng)器;兩個(gè)具有獨(dú)立預(yù)分頻器和比較器功能的8位定時(shí)器/計(jì)數(shù)器;一個(gè)具有預(yù)分頻器、比較功能和捕捉功能的16位定時(shí)器/計(jì)數(shù);具有獨(dú)立振蕩器的實(shí)時(shí)計(jì)數(shù)器RTC;四通道PWM;8路10位ADC;可編程的串行LISART;可工作于主機(jī)/從機(jī)模式的SPI串行接口;有開(kāi)始狀態(tài)檢測(cè)器的通用串行接口USI;具有獨(dú)立片內(nèi)振蕩器的可編程看門(mén)狗定時(shí)器;片內(nèi)模擬比較器;引腳電平變化可引發(fā)中斷及喚醒MCU。
(5)特殊的微控制器特點(diǎn)。上電復(fù)位(POR)以及可編程的掉電檢測(cè)(BOD);經(jīng)過(guò)校準(zhǔn)的片內(nèi)RC振蕩器;片內(nèi)、片外中斷源;休眠模式:空閑模式、ADC噪聲抑制模式、省電模式、掉電模式和Standby模式。
(6)I/O口與封裝。53個(gè)可編程的I/O口;64引腳TQFP封裝與64引腳MLF封裝。
(7)工作電壓。ATmega169V:1.8~5.5V;ATmega169L:2.7~5.5V;ATmegal69:4.5~5.5V。
(8)工作溫度范圍。-40℃至85℃,工業(yè)級(jí)。
4 總結(jié)
根據(jù)本文中提出的通信方案,對(duì)計(jì)算機(jī)所發(fā)出的指令信號(hào)已經(jīng)傳遞至Modem,轉(zhuǎn)換成換能器所接受的頻帶范圍,實(shí)驗(yàn)過(guò)程中已取得了良好的效果。目前根據(jù)選用的單片機(jī)型號(hào)正在進(jìn)行單片機(jī)系統(tǒng)電路的設(shè)計(jì)。此水聲通信系統(tǒng)不僅適用于智能封堵器,可以很好地進(jìn)行水下數(shù)據(jù)傳送,還可應(yīng)用在其他海洋、湖泊的通信環(huán)境中,具有較高的可移植性,只需更改其中的通信協(xié)議即可。
智能封堵器應(yīng)用于海底管道的維修作業(yè)時(shí),首先要解決的是在深海處如何實(shí)現(xiàn)平臺(tái)母船與管道之間的即時(shí)通信。本文研究的是從海上平臺(tái)發(fā)出的數(shù)據(jù)指令信號(hào)到達(dá)管道上方接收器之間的通信過(guò)程。由于海底環(huán)境的特殊性,故采用水聲無(wú)線(xiàn)通信方式。智能封堵器通信信號(hào)流程如圖1所示。計(jì)算機(jī)指令信息首先轉(zhuǎn)換成聲信號(hào)在海洋環(huán)境下傳輸,最后轉(zhuǎn)換成ELF電磁波信號(hào),利用電磁波信號(hào)穿透泥土、海水、管壁,指導(dǎo)管道內(nèi)的智能封堵器工作。
智能封堵器海底通信中的水聲通信系統(tǒng)部分主要研究的是從母船或平臺(tái)計(jì)算機(jī)操作界面發(fā)出指令數(shù)據(jù),將數(shù)字信號(hào)經(jīng)由Modem轉(zhuǎn)換調(diào)制成模擬信號(hào),經(jīng)過(guò)功率放大匹配電路,送至水聲換能器,轉(zhuǎn)換成聲信號(hào)。
1 水聲通信系統(tǒng)的總體結(jié)構(gòu)設(shè)計(jì)
用于海底管道的智能封堵器,要攻克的技術(shù)難關(guān)之一是如何實(shí)現(xiàn)智能封堵器的水上水下通訊,以完成平臺(tái)的遙控操作。由于海洋環(huán)境的特殊性,故采用了水聲無(wú)線(xiàn)通信方式。水聲通信系統(tǒng)的設(shè)計(jì)方法通常取決于系統(tǒng)為克服多徑干擾和相位起伏所采用的不同技術(shù)。這些技術(shù)可分為兩個(gè)方面:一是對(duì)信號(hào)的設(shè)計(jì),即系統(tǒng)調(diào)制/解調(diào)的方案設(shè)計(jì);二是發(fā)射/接收設(shè)備的結(jié)構(gòu),即系統(tǒng)的幀處理及均衡方案的設(shè)計(jì)。根據(jù)對(duì)目前已有的水聲通訊技術(shù)的調(diào)研和智能封堵器的實(shí)際應(yīng)用環(huán)境和特點(diǎn);本文提出了如圖2所示的水聲通訊方案。整套通訊系統(tǒng)主要由海上控制中心、外部通訊鏈路、以及遙控執(zhí)行機(jī)構(gòu)三個(gè)邏輯子系統(tǒng)組成。該系統(tǒng)主要是基于聲波和超低頻電磁波來(lái)進(jìn)行雙向通訊。
此通訊系統(tǒng)分為水上收/發(fā)和水下收/發(fā)通訊系統(tǒng)兩部分。水上部分由計(jì)算機(jī)、Modem、收/發(fā)濾波放大電路和雙向換能器組成,水下部分由水下雙向換能器、收/發(fā)放大濾波電路、水聲/ELF轉(zhuǎn)換電路和ELF-Modem+單片機(jī)控制系統(tǒng)組成。因?yàn)樾盘?hào)均為收/發(fā)雙向傳遞,所以采用雙向換能器,雙向換能器內(nèi)部既有發(fā)射器又有水聽(tīng)器,既可發(fā)送聲波信號(hào)又可接收聲波信號(hào)。經(jīng)過(guò)調(diào)研和選型,筆者采用的水聲發(fā)射換能器是淺海圓柱型壓電陶瓷換能器FSQ-37。
Modem將計(jì)算機(jī)指令信息調(diào)制成換能器工作頻帶上的電信號(hào),此電信號(hào)經(jīng)過(guò)功率放大后送給水上雙向換能器發(fā)射,經(jīng)換能器發(fā)射后變?yōu)槁暡ㄐ盘?hào)在水中傳輸,水下雙向換能器接收到聲波信號(hào)后再將其轉(zhuǎn)換為電信號(hào),由于信號(hào)在水中傳輸?shù)倪^(guò)程中會(huì)有所衰減,并伴隨著一些干擾,所以這個(gè)轉(zhuǎn)換后的電信號(hào)必須經(jīng)過(guò)放大濾波后再經(jīng)水聲/ELF轉(zhuǎn)換電路轉(zhuǎn)換成ELF電磁波信號(hào)發(fā)射,ELF電磁波信號(hào)可穿透泥土、海水和管壁被管道內(nèi)的ELF-Modem+單片機(jī)控制系統(tǒng)所接收,經(jīng)ELF-Modem解調(diào)后變成邏輯電平指令送給單片機(jī),單片機(jī)將收到的指令解析后控制封堵器完成各種動(dòng)作,這樣就完成了一次信號(hào)的單向傳輸。
此外,封堵器在執(zhí)行指令過(guò)程中,其上的傳感器將檢測(cè)到的信號(hào)傳送給單片機(jī),管道內(nèi)的單片機(jī)將這些溫度、壓力和封堵器狀態(tài)等數(shù)據(jù)送回海上的計(jì)算機(jī)進(jìn)行監(jiān)測(cè)和計(jì)算,這樣計(jì)算機(jī)就可以了解封堵器的運(yùn)行情況,并根據(jù)反饋信號(hào)隨時(shí)調(diào)整控制指令。這個(gè)信息的傳送過(guò)程是先由單片機(jī)將邏輯電信號(hào)送給ELF-Modem,經(jīng)ELF-Modem調(diào)制后變?yōu)镋LF電磁波穿過(guò)管壁,被水聲/ELF轉(zhuǎn)換電路接收后轉(zhuǎn)換為換能器工作頻帶上的電信號(hào),此電信號(hào)再經(jīng)過(guò)功率放大后送給水下雙向換能器,發(fā)射器發(fā)射的聲波信號(hào)由下至上在水中傳輸,到達(dá)水上后被水上的換能器接收并變?yōu)殡娦盘?hào),經(jīng)過(guò)放大送給Modem解調(diào)后再送給計(jì)算機(jī),完成由海底到海面的單方向傳輸。為實(shí)現(xiàn)全雙工的傳輸,水聲和ELF通訊都分別使用雙信道進(jìn)行通訊,即收/發(fā)采用不同的信道。
水聲通訊的關(guān)鍵在于實(shí)現(xiàn)基于Modem的水聲調(diào)制解調(diào)技術(shù),以便可靠地收/發(fā)數(shù)據(jù)。在通訊系統(tǒng)方案確定之后,進(jìn)行水試試驗(yàn)找到最佳發(fā)射、接收頻率作為水下通信傳輸?shù)妮d波頻率。水上PC機(jī)的人機(jī)交互程序和串行通信程序采用Visual Basic 6.0編寫(xiě)。采用FSK方式傳送數(shù)字信息控制載波的頻率,將數(shù)字信息調(diào)制到水聲換能器的工作頻帶上,推動(dòng)水聲換能器把電能轉(zhuǎn)化為聲波發(fā)射出去。
2 通信試驗(yàn)線(xiàn)路的搭建
考慮到自制一個(gè)Modem不僅要重新設(shè)計(jì)和調(diào)試電路,而且還要編寫(xiě)復(fù)雜的通訊協(xié)議,因此通訊所用的Modem為T(mén)P-LINK的TM-EC5658V外置式Modem,這種Modem技術(shù)成熟,編程方便,編寫(xiě)計(jì)算機(jī)到Modem之間的通訊程序,可利用Ⅶ中的MSComm控件來(lái)實(shí)現(xiàn)。又由于這種Modem的通訊協(xié)議是開(kāi)放式的,因此即使是用單片機(jī)也可較容易地編寫(xiě)單片機(jī)至Modem之間的通訊程序。雖然使用成品的Modem給編程帶來(lái)了方便,但是由于成品的Modem的工作載頻在300~3400Hz,一般采用FSK調(diào)制方法時(shí),用特殊的音頻范圍來(lái)區(qū)別發(fā)送數(shù)據(jù)和接收數(shù)據(jù)。如調(diào)頻Modem發(fā)送和接收數(shù)據(jù)的二進(jìn)制邏輯信號(hào)被指定的專(zhuān)用頻率是:發(fā)送時(shí)信號(hào)邏輯0的頻率為1070Hz,信號(hào)邏輯1的頻率為1270Hz,接收時(shí)信號(hào)邏輯0的頻率為2025Hz,信號(hào)邏輯1的頻率為2225Hz。這樣的調(diào)制頻率與換能器的工作頻帶相差較遠(yuǎn),本文所選用的FSQ-37換能器的頻帶寬度在20~46kHz之間,很明顯,從Modem出來(lái)的載波信號(hào)不能直接送給換能器,必須經(jīng)過(guò)變頻后轉(zhuǎn)換到換能器的工作頻帶,再經(jīng)過(guò)放大濾波后送給換能器轉(zhuǎn)換為聲波信號(hào)進(jìn)行發(fā)射。因此在Modem和濾波放大電路之間還要設(shè)計(jì)一個(gè)變頻器用來(lái)轉(zhuǎn)換Modem和換能器的發(fā)射頻率。考慮到以上因素后海上部分的通訊鏈路的搭建如圖4所示:
在圖4中計(jì)算機(jī)發(fā)出的信號(hào)通過(guò)RS-232送給Modem,經(jīng)Modem調(diào)制后把計(jì)算機(jī)信息變?yōu)槟M量,送給變頻器,變頻器將Modem的調(diào)制信號(hào)轉(zhuǎn)換為換能器的工作頻率后再送給濾波放大電路,驅(qū)動(dòng)換能器發(fā)射聲信號(hào)將數(shù)據(jù)信息傳送至海底。
由于本文不涉及ELF通訊方式,所以在搭建海下接收通訊鏈路時(shí)作了部分簡(jiǎn)化,海底接收端的模擬通訊鏈路如圖5所示。
在圖5中,海底的換能器將收到的聲波信號(hào)轉(zhuǎn)換為電信號(hào),經(jīng)濾波放大后送給變頻器轉(zhuǎn)換為Modem的載頻信號(hào),Modem將收到信號(hào)解調(diào)后送至單片機(jī),完成一次單項(xiàng)數(shù)據(jù)信息傳輸。從單片機(jī)向計(jì)算機(jī)逆向傳輸信息的原理與上述原理相同,只是信息的發(fā)起端不同而已。
3 單片機(jī)的選型
由于海底封堵維修工作時(shí)的長(zhǎng)時(shí)間、供電條件限制等制約因素,因此單片機(jī)的選型,主要從單片機(jī)工作的可靠性、節(jié)能性、工作速度和通訊接口的設(shè)計(jì)出發(fā)。經(jīng)過(guò)調(diào)研選擇ATMEL公司的ATmega系列高性能、低功耗的8位AVR微處理器ATmegal69,ATmega169具有以下特性:
(1)先進(jìn)的RISC結(jié)構(gòu)。130條指令,大多數(shù)指令執(zhí)行時(shí)間為單個(gè)時(shí)鐘周期;32個(gè)8位通用工作寄存器;全靜態(tài)工作;工作于16MHz時(shí)性能高達(dá)16MIPS;只需兩個(gè)時(shí)鐘周期的硬件乘法器。
(2)非易失性程序和數(shù)據(jù)存儲(chǔ)器。16k字節(jié)的系統(tǒng)內(nèi)可編程Flash;擦寫(xiě)壽命:10000次;具有獨(dú)立鎖定位的可選Boot代碼區(qū);通過(guò)片上Bo-ot程序?qū)崿F(xiàn)系統(tǒng)內(nèi)編程;真正的同時(shí)讀寫(xiě)操作;512字節(jié)的EEPROM;擦寫(xiě)壽命:100000次;1k字節(jié)的片內(nèi)SRAM。
(3)可以對(duì)鎖定位進(jìn)行編程以實(shí)現(xiàn)用戶(hù)程序的加密。JTAG接口(與IEEE1149.1標(biāo)準(zhǔn)兼容);符合JTAG標(biāo)準(zhǔn)的邊界掃描功能;支持?jǐn)U展的片內(nèi)調(diào)試功能;通過(guò)JTAG接口實(shí)現(xiàn)對(duì)Flash、EEPROM、熔絲位和鎖定位的編程。
(4)外設(shè)特點(diǎn)。4×25段的LCD驅(qū)動(dòng)器;兩個(gè)具有獨(dú)立預(yù)分頻器和比較器功能的8位定時(shí)器/計(jì)數(shù)器;一個(gè)具有預(yù)分頻器、比較功能和捕捉功能的16位定時(shí)器/計(jì)數(shù);具有獨(dú)立振蕩器的實(shí)時(shí)計(jì)數(shù)器RTC;四通道PWM;8路10位ADC;可編程的串行LISART;可工作于主機(jī)/從機(jī)模式的SPI串行接口;有開(kāi)始狀態(tài)檢測(cè)器的通用串行接口USI;具有獨(dú)立片內(nèi)振蕩器的可編程看門(mén)狗定時(shí)器;片內(nèi)模擬比較器;引腳電平變化可引發(fā)中斷及喚醒MCU。
(5)特殊的微控制器特點(diǎn)。上電復(fù)位(POR)以及可編程的掉電檢測(cè)(BOD);經(jīng)過(guò)校準(zhǔn)的片內(nèi)RC振蕩器;片內(nèi)、片外中斷源;休眠模式:空閑模式、ADC噪聲抑制模式、省電模式、掉電模式和Standby模式。
(6)I/O口與封裝。53個(gè)可編程的I/O口;64引腳TQFP封裝與64引腳MLF封裝。
(7)工作電壓。ATmega169V:1.8~5.5V;ATmega169L:2.7~5.5V;ATmegal69:4.5~5.5V。
(8)工作溫度范圍。-40℃至85℃,工業(yè)級(jí)。
4 總結(jié)
根據(jù)本文中提出的通信方案,對(duì)計(jì)算機(jī)所發(fā)出的指令信號(hào)已經(jīng)傳遞至Modem,轉(zhuǎn)換成換能器所接受的頻帶范圍,實(shí)驗(yàn)過(guò)程中已取得了良好的效果。目前根據(jù)選用的單片機(jī)型號(hào)正在進(jìn)行單片機(jī)系統(tǒng)電路的設(shè)計(jì)。此水聲通信系統(tǒng)不僅適用于智能封堵器,可以很好地進(jìn)行水下數(shù)據(jù)傳送,還可應(yīng)用在其他海洋、湖泊的通信環(huán)境中,具有較高的可移植性,只需更改其中的通信協(xié)議即可。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。