
摘要:介紹了一個(gè)基于單片機(jī)的電子式轉(zhuǎn)速里程表實(shí)現(xiàn)方案,討論了里程計(jì)數(shù)的原理和轉(zhuǎn)速指示原理,給出了用單片機(jī)AT89C2051和LM1819驅(qū)動(dòng)器設(shè)計(jì)的汽車轉(zhuǎn)速里程表的具體電路原理圖。
1 概述
傳統(tǒng)的汽車轉(zhuǎn)速里程表的功能有兩個(gè),一是用指針指示汽車行駛的瞬時(shí)車速,二是用機(jī)械計(jì)數(shù)器記錄汽車行駛的累計(jì)里程。現(xiàn)代汽車正向高速化方向發(fā)展,隨著車速的提高,用軟軸驅(qū)動(dòng)的傳統(tǒng)車速里程表受到前所未有的挑戰(zhàn),這是因?yàn)檐涊S在高速旋轉(zhuǎn)時(shí),由于受鋼絲交變應(yīng)力極限的限制而容易斷裂,同時(shí),軟軸布置過長會(huì)出現(xiàn)形變過大或運(yùn)動(dòng)遲滯等現(xiàn)象,而且,對于不同的車型,轉(zhuǎn)速里程表的安裝位置也會(huì)受到軟軸長度及彎曲度的限制。凡此種種,使得基于非接觸式轉(zhuǎn)速傳感器的電子式轉(zhuǎn)速里程表得以迅速發(fā)展。
2 里程累計(jì)實(shí)現(xiàn)原理
車速里程表的速比表示的是:車速里程表轉(zhuǎn)軸(軟軸)在汽車行駛一公里時(shí)所轉(zhuǎn)過的轉(zhuǎn)數(shù)。 基于單片機(jī)的車速里程表采用霍爾型非接觸式轉(zhuǎn)速傳感器。這種車速里程表轉(zhuǎn)軸每轉(zhuǎn)一圈,霍爾傳感器將感應(yīng)發(fā)出8個(gè)脈沖。現(xiàn)在以速比為1:624的車型為例? 汽車行駛一公里? 則霍爾傳感器發(fā)出的脈沖數(shù)共為8×624=4992個(gè),或者說,每個(gè)脈沖代表了1/4992公里的里程。將這些脈沖信號(hào)當(dāng)作外部中斷源輸入給單片機(jī),使每個(gè)脈沖產(chǎn)生一個(gè)中斷,并通過中斷服務(wù)程序?qū)γ總€(gè)脈沖進(jìn)行計(jì)數(shù),這樣,當(dāng)計(jì)滿4992時(shí),表明汽車行駛了1公里,然后再給累計(jì)單元加一,并存入EEPROM單元,最后通過刷新LCD液晶顯示器,即可實(shí)現(xiàn)里程計(jì)數(shù)功能。但在編程時(shí)要注意,MCS-51系列單片機(jī)的外部中斷有兩種觸發(fā)方式,即電平觸發(fā)和邊沿觸發(fā),本設(shè)計(jì)選用邊沿觸發(fā)方式,即采用負(fù)跳變引起中斷。
3 車速測量及指示原理
車速指示可采用雙線圈汽車轉(zhuǎn)速表頭,它由空氣軸表芯和驅(qū)動(dòng)電路組成,空氣軸表芯通常由三部分組成:磁鐵、與轉(zhuǎn)軸相連的指針和兩個(gè)互成九十度的線圈。轉(zhuǎn)軸是表芯唯一的可動(dòng)部件,磁鐵的轉(zhuǎn)角總是趨向于兩個(gè)線圈的磁場強(qiáng)度矢量的合成方向,磁場強(qiáng)度正比于加在線圈上的電壓,因此,通過改變電壓的極性和幅度,可在理論上使轉(zhuǎn)軸組件在0~360度范圍內(nèi)轉(zhuǎn)動(dòng)。顯然,只要能按一定的規(guī)律驅(qū)動(dòng)兩個(gè)線圈,就可以使指針偏轉(zhuǎn)位置與輸入量成線性關(guān)系,即滿足下列公式:
θ=KVin
其中θ為指針偏轉(zhuǎn)角,單位為度; K為轉(zhuǎn)角常數(shù),單位為度/V; Vin是輸入電壓,單位為V。
每個(gè)線圈的磁場強(qiáng)度矢量之和必須跟隨偏轉(zhuǎn)角θ。考慮到轉(zhuǎn)軸組件總是指向Hsine和Hcosine這兩個(gè)正交矢量之和的方向?則其方向可由下式求得?
θ=arctan Hsine/Hcosine
并由此可以得出:
θ=arctan sinθ/cosθ
由上述公式可見?當(dāng)Hsine按θ的正弦函數(shù)變化,而Hcosine按θ的余弦函數(shù)變化時(shí)?所得到的總磁場強(qiáng)度的方向與θ角的方向相同,由于轉(zhuǎn)軸組件與磁場強(qiáng)度矢量和的方向相同,因此,指針將始終指向θ角的方向。
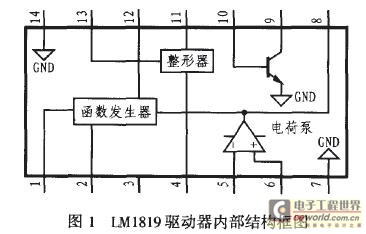
圖1所示是LM1819驅(qū)動(dòng)器的內(nèi)部組成原理框圖,它由電荷泵、整形器、函數(shù)發(fā)生器等組成?輸入的轉(zhuǎn)速信號(hào)通過內(nèi)部的三極管緩沖后,輸入到電荷泵即可進(jìn)行F/V頻率電壓轉(zhuǎn)換,兩個(gè)輸出端按輸入量的正弦和余弦函數(shù)變化,2腳和12腳的最小驅(qū)動(dòng)能力為±20mA(±4V),線圈的公共端接到1腳可為內(nèi)部函數(shù)發(fā)生器提供反饋信號(hào), 同時(shí)為5.1V齊納二極管提供參考電壓。在該電路中,K=54°/V,輸入Vin 實(shí)際上是4腳和8腳的電位差,8腳既是諾頓放大器的輸出, 又是函數(shù)發(fā)生器的輸入,一般4腳的電壓是2.1V,所以有:
θ=K(V8-Vref)=54(V8-2.1)
由于V8是在2.1V~7.1V的范圍內(nèi)變化的,故LM1819可以驅(qū)動(dòng)十字表頭以使其在0°~270°范圍內(nèi)轉(zhuǎn)動(dòng)。
4 電路原理圖
圖2所示是一種汽車轉(zhuǎn)速里程表的電路原理圖。這是一個(gè)典型的單片機(jī)最小應(yīng)用系統(tǒng)。單片機(jī)AT89C2051以其低價(jià)、低功耗、可靠性高和易于編程等特點(diǎn)著稱,X25045則是MCS-51系列單片機(jī)電路的一個(gè)輔助芯片,主要擔(dān)當(dāng)復(fù)位、電壓檢測、看門狗和EEPROM功能,該芯片的采用大大提高了系統(tǒng)的可靠性,減少了外圍芯片數(shù),可實(shí)現(xiàn)里程累計(jì)的掉電存儲(chǔ)。LCM1010為十位八段式帶背光液晶顯示模塊,采用三線串行接口,它具有功耗低和編程方便的特點(diǎn)。該顯示共分兩行顯示,第一行6位顯示累計(jì)里程,第二行4位(1位小數(shù))用于顯示小計(jì)里程。圖中K1為小計(jì)里程清零鍵,R4用于調(diào)節(jié)液晶顯示器的視角對比度。芯片X25045是Xicor公司推出的帶有可編程μP 監(jiān)控器的CMOS串行EEPROM,帶有4096位,按512×8來組織。它具有4字節(jié)頁寫方式和10萬次使用周期,數(shù)據(jù)可保存100年。為了保證累計(jì)里程單元的個(gè)位或小計(jì)單元的小數(shù)位可靠刷新,當(dāng)這些單元接近極限使用周期時(shí),可采取換頁的辦法來使這些數(shù)據(jù)移動(dòng)到新單元以繼續(xù)計(jì)數(shù)。
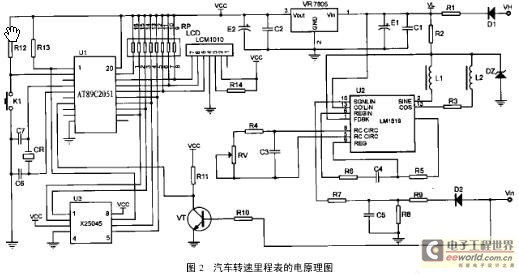
霍爾傳感器發(fā)出的脈沖信號(hào)經(jīng)過整形可分成兩路,一路送到單片機(jī)的INT1端用于累計(jì)里程計(jì)數(shù),另一路送到LM1819驅(qū)動(dòng)器的轉(zhuǎn)速信號(hào)輸入端(10腳),然后由驅(qū)動(dòng)電路根據(jù)輸入信號(hào)的頻率在2腳和12腳輸出相應(yīng)的正弦和余弦驅(qū)動(dòng)信號(hào),十字線圈產(chǎn)生的磁場共同作用于磁鐵可使轉(zhuǎn)軸組件偏轉(zhuǎn)相應(yīng)的角度。但調(diào)整時(shí)要注意,電容C3的大小會(huì)改變表針偏轉(zhuǎn)的平滑性,C3越大,平滑性越好,但同時(shí)時(shí)間遲滯也會(huì)加大,而C3過小會(huì)使表針抖動(dòng);C4可用于調(diào)整電路的線性和滯后誤差;R4的值可以改變表針的指示刻度點(diǎn)。
5 結(jié)論
本設(shè)計(jì)以單片機(jī)AT89C2051來實(shí)現(xiàn)里程累計(jì)、小計(jì)、清零及存儲(chǔ),并以LM1819集成電路驅(qū)動(dòng)十字線圈表頭,從而實(shí)現(xiàn)了車速的指示。該設(shè)計(jì)方案成本低廉、指針穩(wěn)定性好、響應(yīng)速度快、抗震性強(qiáng)、可靠性和性價(jià)比都很高。經(jīng)實(shí)際使用證明,該里程表完全可以取代傳統(tǒng)的以軟軸驅(qū)動(dòng)的車速里程表。當(dāng)然,這只是一種實(shí)現(xiàn)方案,也可以由單片機(jī)通過軟件來驅(qū)動(dòng)十字線圈表頭,即由單片機(jī)分別控制表頭的正弦線圈和余弦線圈而省去LM1819集成電路。對此,此處不再贅述。