
1 引言
隨著我國汽車保有量逐年增加,高速公路的發(fā)展使得汽車的行駛速度越來越快。車流量也越來越大,導(dǎo)致高速公路交通事故頻頻發(fā)生,其發(fā)生率甚至達(dá)到普通公路的4 倍,且有上升趨勢。在高速公路所發(fā)生的交通事故中尤以汽車追尾" title="汽車追尾">汽車追尾居多,約占30%~40%,而在這些事故中,80%以上的事故是由于司機(jī)反應(yīng)不及時或者判斷失誤引起的。由于目前只有高檔車型才配有防碰撞裝置,而且以往設(shè)計中只單純考慮在車前或車后安裝防碰撞裝置,不盡全面,所以設(shè)計一套低成本、通用性好的汽車防車前車后追尾的安全裝置具有廣闊的應(yīng)用和市場前景。因此。這里提出一種基于AVR" title="AVR">AVR的新型防汽車追尾安全裝置設(shè)計。
2 安全裝置組成和硬件電路設(shè)計
安全裝置硬件電路設(shè)計主要由單片機(jī)控制、加速度傳感器、激光雷達(dá)、LED剎車燈及電源等電路組成,如圖1所示,裝置車載狀況如圖2所示。


2.1 單片機(jī)ATmega8L
該設(shè)計選用高性能、低功耗單片機(jī)ATmega8L" title="ATmega8L">ATmega8L,它是基于先進(jìn)的AVR RISC結(jié)構(gòu)的8位CMOS 工藝微控制器,器件內(nèi)部集成有模擬比較器,6通道1O位(TOFP與MLF封裝為8通道)的A/D轉(zhuǎn)換器,3個具有比較模式的靈活定時器/計數(shù)器,512 字節(jié)的EEPROM,片內(nèi)/外中斷,5種可通過軟件選擇的睡眠模式,以及8 KB的系統(tǒng)內(nèi)可編程Flash存儲器(可隨時在線編程),易于產(chǎn)品設(shè)計和更新。同時,ATmega8L可達(dá)到接近1 MIPS/MHz的性能,運(yùn)行速度比普通CISC單片機(jī)高出10倍,并且該器件價格不高,為許多嵌入式控制應(yīng)用提供靈活且低成本的解決方案。另外,ATmega8L的工作電壓為2.7~5.5 V,非常適用于那些電壓波動較大的場合。
2.2 加速度傳感器MMA7260QT與單片機(jī)接口設(shè)計
該系統(tǒng)設(shè)計選用加速度傳感器MMA72600T,測量加速度。該器件采用MEMS原理制作的低成本、低功耗、單芯片集成XYZ三軸感應(yīng)加速度傳感器,可準(zhǔn)確測量0~350 Hz、±6 g范圍內(nèi)動態(tài)或靜態(tài)加速度,還能夠監(jiān)測車體微小震動和整車的傾斜角度。該器件內(nèi)部集成了信號調(diào)理、單極低通濾波器和溫度補(bǔ)償技術(shù),并提供4個量程 (1.5g、2 g、4 g、6 g)可選,2.2~3.6 V單電源供電,工作電流小于500μA,休眠模式下最低供電電流僅為3μA。
MMA7260QT加速度傳感器采集汽車加速度數(shù)據(jù),并將數(shù)據(jù)通過ATmega8L的PD7(AIN1)端口傳輸至ATmega8L,其具體連接電路如圖3所示。

圖3中,當(dāng)Xout輸出和閾值電壓比較匹配時,系統(tǒng)發(fā)出模擬比較器中斷,單片機(jī)轉(zhuǎn)向LED剎車燈閃爍中斷子程序處理,采用這種方式可節(jié)省系統(tǒng)資源。 Xout與PD7引腳之間的RC具有濾波作用,用于減小時鐘噪聲,在電源和地之間加入去耦電容。另外,實(shí)際焊接安裝時應(yīng)保證加速度傳感器 MMA72600T盡可能地靠近微控制器ATmega8L放置。
2.3 霍爾車速傳感器
霍爾車速傳感器由8級磁鋼、UGN-3030T型霍爾開關(guān)傳感器、LM2917及放大電路組成,如圖4所示。
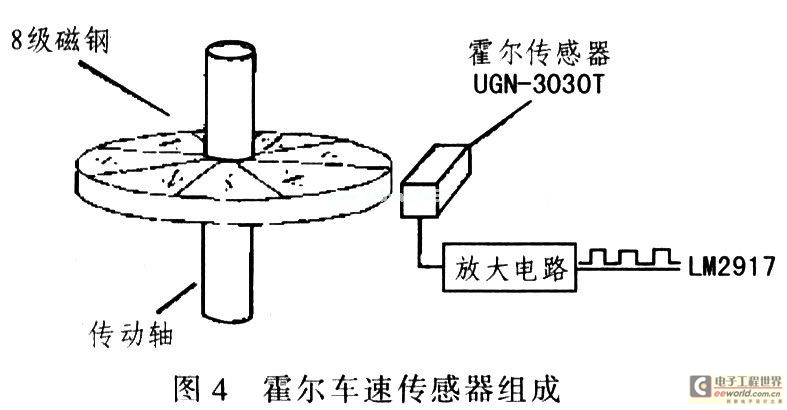
圖4中,汽車傳動部分帶動8級磁鋼旋轉(zhuǎn),由于磁場變化使得8級磁鋼每轉(zhuǎn)一圈霍爾傳感器便產(chǎn)生8個脈沖信號,經(jīng)放大器處理輸出到頻率/電壓轉(zhuǎn)換器LM2917,由單片機(jī)的A/D轉(zhuǎn)換器根據(jù)LM2917輸出電壓測量當(dāng)前汽車時速。
2.4 激光雷達(dá)測距
測距方法主要有超聲波、激光雷達(dá)、連續(xù)波雷達(dá)等,基于成本和設(shè)計需求考慮,激光雷達(dá)測距是最佳選擇。激光雷達(dá)測距有連續(xù)波和脈沖波兩種方式,本設(shè)計使用脈沖波方式。安全裝置發(fā)出脈沖狀的紅外激光束照射前方,并利用汽車后部可反光部件(以汽車號碼牌為主)的反射光,通過受光裝置檢測反射光,單片機(jī)根據(jù)時間差計算出其距離。
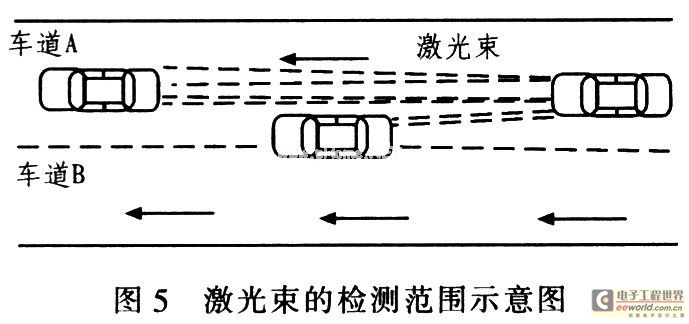
該部分電路由發(fā)光部、受光部、信號調(diào)理電路等組成,最終輸出信號由系統(tǒng)單片機(jī)處理。由于激光雷達(dá)發(fā)射光束集中,采用單一發(fā)射方式無法有效檢測前方一定距離,故在汽車前方安裝3個激光雷達(dá)測距模塊,如果其中一個模塊檢測到的距離小于該時刻最小允許距離,安全裝置將報警,即能夠及時檢測到插入車流的車輛并警報,如圖5所示。
2.5 LED剎車燈
該設(shè)計中,剎車燈由發(fā)光二極管陣列組成,發(fā)光二極管選用Evedight公司生產(chǎn)的1 W高亮度LED,其響應(yīng)時間為納秒級,而普通車燈的熱啟動時間約250 ms。假設(shè)汽車時速為90 km/h(即25 m/s),通過計算可得反應(yīng)迅速的LED剎車燈可提早約6 m距離發(fā)出剎車警告,從而有效避免汽車追尾。將LED放置成內(nèi)、中、外三圈形狀。當(dāng)單片機(jī)根據(jù)加速度傳感器的輸入信號得到加速度值超過設(shè)定的閾值后,單片機(jī)輸出信號經(jīng)ULN2003驅(qū)動繼電器動作,LED剎車燈響應(yīng)后由內(nèi)一中一外一內(nèi)循環(huán)點(diǎn)亮,由于其亮度高、響應(yīng)快。在實(shí)際使用中效果良好。另外,該部分電路需與汽車剎車裝置聯(lián)動,以確保準(zhǔn)確輸出剎車信號。
2.6 液晶顯示
該設(shè)計采用并行128x64液晶屏,雖然占用較多的I/O端口,但并行傳輸便于編寫驅(qū)動程序,如果系統(tǒng)單片機(jī)不能提供足夠的I/O端口,可選擇串行數(shù)據(jù)傳輸?shù)囊壕?span id="aes6ws0" class="hrefStyle">顯示屏。另外,為了讓司機(jī)能夠更方便地看到設(shè)計系統(tǒng)所測得的數(shù)據(jù),應(yīng)將顯示設(shè)備放置于司機(jī)主控臺視線合理位置。
3 系統(tǒng)軟件設(shè)計
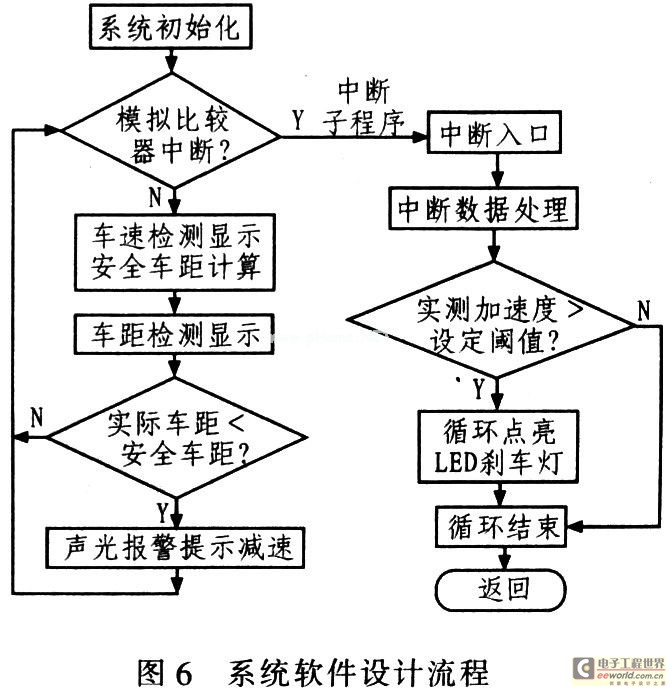
控制部分由ATmega8L控制完成,主要功能為:計算本車速度、車間距離,測定加速度,并通過LCD實(shí)時顯示;實(shí)際車間距離和安全車間距離的比較發(fā)出報警聲或報警燈閃爍;剎車時的加速度與設(shè)定閾值相比,決定是否點(diǎn)亮LED剎車燈,系統(tǒng)軟件設(shè)計流程如圖6所示。
在加速度測定中,考慮到汽車行駛當(dāng)中的振動和噪聲等影響信號輸出,還需進(jìn)行必要的軟件濾波處理,這里采取數(shù)據(jù)平均值方法。據(jù)<中華人民共和國道路交通安全法實(shí)施條例>,安全行車距離與行車速度關(guān)系模型如下:當(dāng)v≥100 km/h時,S>100 m;當(dāng)v<100 km/h時,S>vt/1 000 m;其中,S為安全行車間距,單位為m;v為本車時速,單位km/h;t為每小時。高速公路上S>50 m。軟件設(shè)計主程序代碼如下:
car_speed();//汽車時速監(jiān)測,返回值為i
lcd_display(i,1);//第一行實(shí)時顯示車速
car_distance();//車距監(jiān)測,返回值為j
lcd_display(j,2);//第二行實(shí)時顯示車距
car_cmpl(i,j);//比較車距與安全車距,確定是否報警
#pragma interrupt_handler ana_comp_isr:17
car_acc();//加速度監(jiān)測,返回值為k
car_cmp2(k);//實(shí)際加速度與設(shè)定閾值的比較,確定是否點(diǎn)亮LED剎車燈
主程序在車輛開啟后一直循環(huán)執(zhí)行,直至車輛電源關(guān)閉。
4 結(jié)束語
該設(shè)計采用功能模塊化技術(shù),易于操作及擴(kuò)展;選用性價比較高的器件,具有良好的應(yīng)用和市場前景。設(shè)計方案切實(shí)可行,對于汽車防追尾具有重要意義。另外,設(shè)計所采用的加速度傳感器還可作為汽車防盜的震動信號監(jiān)測。