
引言
電動(dòng)執(zhí)行器是工業(yè)過(guò)程控制系統(tǒng)中一個(gè)十分重要的現(xiàn)場(chǎng)驅(qū)動(dòng)裝置,其能源取用方便、安裝調(diào)試簡(jiǎn)單,在電力、冶金、石油、化工等工業(yè)部門(mén)得到越來(lái)越廣泛的應(yīng)用。電動(dòng)執(zhí)行器包括電動(dòng)執(zhí)行機(jī)構(gòu)和調(diào)節(jié)閥兩部分,控制精度主要決定于電動(dòng)執(zhí)行機(jī)構(gòu)的控制性能,它能夠?qū)⑾到y(tǒng)的控制信號(hào)轉(zhuǎn)換成輸出軸的角位移、直線位移,控制閥門(mén)等截流件的位置或其它調(diào)節(jié)機(jī)構(gòu),使被控介質(zhì)按系統(tǒng)要求狀態(tài)工作。
開(kāi)關(guān)磁阻電機(jī)調(diào)速系統(tǒng)SRD(Switched Reluctance Drive)是繼變頻調(diào)速系統(tǒng)、無(wú)換向器電動(dòng)機(jī)調(diào)速系統(tǒng)之后發(fā)展起來(lái)的最新一代交流無(wú)級(jí)調(diào)速系統(tǒng)。它具有機(jī)構(gòu)簡(jiǎn)單、堅(jiān)固、成本低、工作可靠、控制靈活、運(yùn)行效率高等諸多優(yōu)點(diǎn),由其構(gòu)成的傳動(dòng)系統(tǒng)具有交、直流傳動(dòng)系統(tǒng)所有的優(yōu)點(diǎn)。基于開(kāi)關(guān)磁阻電機(jī)特點(diǎn),可以將開(kāi)關(guān)磁阻電機(jī)調(diào)速技術(shù)運(yùn)用在智能電動(dòng)執(zhí)行器系統(tǒng)中,這對(duì)提高智能電動(dòng)執(zhí)行器控制性能至關(guān)重要。
一、SRD系統(tǒng)的基本結(jié)構(gòu)
開(kāi)關(guān)磁阻電機(jī)調(diào)速系統(tǒng)SRD主要有SRM、功率變換器、位置檢測(cè)、控制器構(gòu)成。如圖1所示。
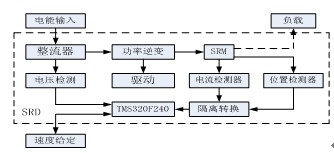
圖1.SRD系統(tǒng)結(jié)構(gòu)圖
二、SRD系統(tǒng)的硬件設(shè)計(jì)
1.功率變換器的主電路設(shè)計(jì)
功率變換器的性能和形式直接影響SRM的效率、成本和可靠性,合理設(shè)計(jì)功率變換器是提高整個(gè)SRD性價(jià)比的關(guān)鍵。功率變換器主要有3個(gè)作用:一是開(kāi)關(guān)作用,是繞組與電源接通或斷開(kāi);二是為繞組的儲(chǔ)能提供回饋途徑;三是為SRM提供電能,滿足機(jī)械能的轉(zhuǎn)換。常見(jiàn)的SRM功率變換器有3種:一是雙繞組功率變換器;二是不對(duì)稱半橋功率變換器;三是H橋式功率變換器。
本系統(tǒng)采用的是電容分壓型主電路,它也叫電容裂相型主電路或雙電源型主電路,是四相SRM廣泛采用的一種功率變換器電路,其電路結(jié)構(gòu)如圖2所示。

圖2 電容分壓型主電路
在此電路中,SRM采用單相通電方式,當(dāng)上橋臂的開(kāi)關(guān)管 導(dǎo)通時(shí),A相繞組從電容 吸收電能;當(dāng) 斷開(kāi)時(shí),則 導(dǎo)通,A相繞組的剩余能量回饋給電容 。而當(dāng)下橋臂 導(dǎo)通時(shí),繞組B從 吸收電能:當(dāng) 斷開(kāi)時(shí),B相繞組的剩余能量經(jīng)VD2回饋給 。因此,為了保證上、下兩個(gè)電容的工作電壓對(duì)稱,該電路僅適用于偶數(shù)相SRM。由于采用電容分壓,加到電機(jī)繞組兩端的電源電壓僅為 ,電源電壓的利用率降低。在同等功率情況下,主開(kāi)關(guān)器件的工作電流為雙開(kāi)關(guān)型電路中功率器件的兩倍.而每個(gè)主開(kāi)關(guān)器件和續(xù)流二極管的額定工作電壓為 ( 是換相引起的瞬時(shí)電壓)。
2. 位置檢測(cè)的硬件實(shí)現(xiàn)
本文電機(jī)采用半數(shù)檢測(cè)方案。對(duì)于8/6 SR電機(jī)而言,在一個(gè)轉(zhuǎn)子極距角 內(nèi),共有4個(gè)步進(jìn)角,位置檢測(cè)信號(hào)應(yīng)相應(yīng)變化4次,當(dāng)轉(zhuǎn)過(guò)一個(gè)轉(zhuǎn)子極距角后,位置信號(hào)又回到起始位置,如此循環(huán),即可使轉(zhuǎn)子位置與繞組導(dǎo)電的順序配合起來(lái)。圖3為光電式位置檢測(cè)電路及整形電路。

圖3 ALVC164245的邏輯結(jié)構(gòu)
四、SRD系統(tǒng)的軟件實(shí)現(xiàn)
4.1 控制算法
本文采用DSP數(shù)字PI調(diào)節(jié)器,實(shí)現(xiàn)對(duì)電機(jī)的雙閉環(huán)控制,圖4為其控制框圖。內(nèi)環(huán)為電流環(huán),外環(huán)為轉(zhuǎn)速環(huán)。計(jì)算出的轉(zhuǎn)子實(shí)際轉(zhuǎn)速與給定轉(zhuǎn)速進(jìn)行比較,偏差通過(guò)速度控制生成電流參考值。它與電流反饋構(gòu)成電流閉環(huán),經(jīng)PI調(diào)節(jié)來(lái)控制PWM的占空比,實(shí)現(xiàn)電機(jī)速度的控制。

圖4 雙閉環(huán)控制框圖
4.2 軟件結(jié)構(gòu)
本系統(tǒng)中的軟件設(shè)計(jì)采用標(biāo)準(zhǔn)C語(yǔ)言與DSP(TMS320LF2407)匯編語(yǔ)言編程,實(shí)行模塊化設(shè)計(jì),增加了程序的可讀性和移植性。本系統(tǒng)程序包括系統(tǒng)的各模塊初始化、電流環(huán)和位置環(huán)中斷程序,主要分為主程序和中斷程序。
4.2.1 主程序
主程序主要完成系統(tǒng)的初始化、初始化狀態(tài)的顯示及起動(dòng)、運(yùn)行子程序的調(diào)用。圖4為主程序的流程圖。
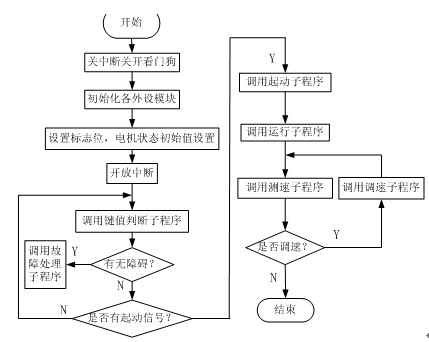
圖4. 主程序流程圖
4.2.2 中斷服務(wù)子程序
中斷服務(wù)程序主要包括故障處理子程序、捕獲子程序和速度檢測(cè)。
在系統(tǒng)運(yùn)行過(guò)程中,由于各芯片本身電流、電壓的承受能力以及環(huán)境的影響,故障的發(fā)生是在所難免的。系統(tǒng)出現(xiàn)故障事先讀取故障標(biāo)志,再判斷故障類型。若故障為欠壓、過(guò)壓類型,則調(diào)用過(guò)壓、欠壓故障處理子程序;若故障為過(guò)流、過(guò)熱時(shí),調(diào)用過(guò)流、過(guò)熱故障處理子程序。待故障處理后,中斷返回。
捕獲子程序主要完成對(duì)捕獲單元檢測(cè)的位置信號(hào)進(jìn)行判斷及處理并計(jì)算電機(jī)的轉(zhuǎn)速。位置傳感器輸出的兩路位置信號(hào)s1、s2在一個(gè)周期內(nèi)有四種不同的組合,按照不同的組合將一個(gè)周期里的兩路位置信號(hào)劃分為四個(gè)狀態(tài),采用兩位二進(jìn)制編碼區(qū)分不同的狀態(tài),即狀態(tài)0(00)、狀態(tài)1(01)、狀態(tài)2(10)、狀態(tài) 3(11)。在該程序中處理器讀取兩個(gè)轉(zhuǎn)子位置檢測(cè)器的輸出電平,根據(jù)這兩個(gè)信號(hào)的組合就可以決定哪一相應(yīng)該通電。當(dāng)捕獲輸入端發(fā)生跳變時(shí),捕獲單元會(huì)將跳變時(shí)刻的定時(shí)器的計(jì)數(shù)值存入到一個(gè)兩級(jí)的FIFO棧,這就方便了計(jì)算轉(zhuǎn)子的轉(zhuǎn)速。
雙閉環(huán)調(diào)節(jié)程序中采用PI算法,該算法流程圖如圖6。PI控制的原理是根據(jù)給定值 與實(shí)際輸出值 的偏差 來(lái)進(jìn)行控制的,將偏差的比例和積分通過(guò)線性組合構(gòu)成PI調(diào)節(jié)器,對(duì)受控對(duì)象進(jìn)行控制。其控制規(guī)律為: ,式中, 為比例系數(shù), 為積分時(shí)間常數(shù)。
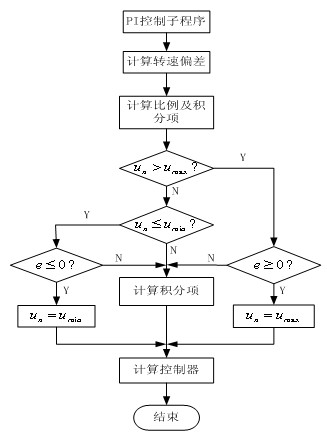
圖6 PI控制軟件流程圖
五、實(shí)驗(yàn)結(jié)果
采用本文所設(shè)計(jì)的調(diào)速方案,得到的不同轉(zhuǎn)速下電機(jī)的電流曲線如下圖:
該調(diào)速系統(tǒng)采用兩相勵(lì)磁運(yùn)行。電流曲線圖中為A、C相電流曲線(2A/div),其導(dǎo)通順序?yàn)镈A-AB-BC-CD,對(duì)應(yīng)轉(zhuǎn)子位置信號(hào)為00-01-11-10。由于考慮到電感的影響,在算法中應(yīng)用PI算法,電流波形的波動(dòng)很小,起到滿意得控制效果。
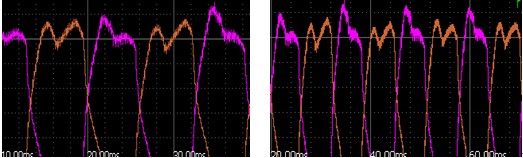
V=800r/m V=1500r/m
六、結(jié)束語(yǔ)
本文對(duì)基于SRM的智能電動(dòng)執(zhí)行器調(diào)速系統(tǒng)的控制器部分進(jìn)行了探討和研究,完成了對(duì)SRM調(diào)速系統(tǒng)控制器部分程序的設(shè)計(jì)工作,實(shí)現(xiàn)了位置檢測(cè)、速度計(jì)算、電流斬波以及PWM電壓輸出等功能。采用本文所述的PI調(diào)節(jié)控制算法對(duì)智能電動(dòng)執(zhí)行器進(jìn)行調(diào)速控制,通過(guò)大量實(shí)驗(yàn)得出的實(shí)驗(yàn)曲線表明,該調(diào)速系統(tǒng)應(yīng)用于智能電動(dòng)執(zhí)行器上,在轉(zhuǎn)速和電流方面都能很好的跟隨給定,有效的減小電流波動(dòng),取得良好的控制效果。