
控制局域網(wǎng)(CAN)屬于現(xiàn)場(chǎng)總線的范疇,它是一種有效支持分布式控制或?qū)崟r(shí)控制的串行通信網(wǎng)絡(luò)。與一般的通信總線相比,CAN總線的數(shù)據(jù)通信可靠性、實(shí)時(shí)性和靈活性好,應(yīng)用領(lǐng)域非常廣泛,通常基于ARM或51單片機(jī),實(shí)現(xiàn)與CAN控制器的通信聯(lián)絡(luò)。FPGA/SOPC技術(shù)是實(shí)現(xiàn)嵌入式系統(tǒng)的最高形式,基于IP軟核的設(shè)計(jì)與應(yīng)用也必將成為替代硬核的一種發(fā)展趨勢(shì)。憑借QuartuslI和NiosII工具,基于FPGA的VHDL(或Verilog)語(yǔ)言設(shè)計(jì)的IP核能夠提供靈活性和性能更好的控制器。
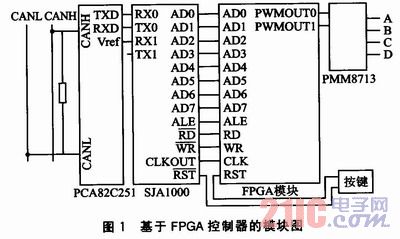
圖1為一個(gè)基于FPGA的控制器的CAN總線節(jié)點(diǎn)。其中PCA82C251是CAN總線接收器,SJA1000是CAN總線通信控制器,PMM8713是驅(qū)動(dòng)步進(jìn)電機(jī)的脈沖分配器,F(xiàn)PGA模塊在節(jié)點(diǎn)模型中對(duì)SJA1000進(jìn)行控制,并將接收到的幀信息進(jìn)行處理,發(fā)送給脈沖分配器,以驅(qū)動(dòng)步進(jìn)電機(jī)。
在設(shè)計(jì)中采用自頂向下的設(shè)計(jì)方法。通過(guò)分析SJA1000常用的控制芯片51單片機(jī)的功能,將其分為主要的4個(gè)模塊:初始化模塊、位查詢模塊、數(shù)據(jù)處理模塊和緩沖區(qū)釋放模塊。
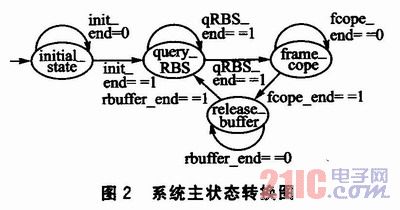
對(duì)SJA1000完成控制功能的過(guò)程用狀態(tài)圖描述如圖2所示,這也是系統(tǒng)的主狀態(tài)機(jī)。4個(gè)狀態(tài)對(duì)應(yīng)上述的4個(gè)功能模塊,首先在initial_st-ate完成對(duì)sJA1000的初始化,在由init_end信號(hào)給出初始化完成標(biāo)志后,進(jìn)入查詢狀態(tài),即query_RBS狀態(tài),由位查詢模塊完成此時(shí)對(duì)SJA100 0的狀態(tài)查詢。如果查詢到SJA1000緩沖區(qū)有幀信息,將qRBS_end置“1”,進(jìn)入下一個(gè)狀態(tài)frame_cope,即幀處理狀態(tài),此時(shí)由數(shù)據(jù)處理模塊完成對(duì)緩沖區(qū)的數(shù)據(jù)讀取,并作處理。在讀取完一幀數(shù)據(jù)后,需要釋放緩沖區(qū),為下一幀信息的接收做準(zhǔn)備。此時(shí)狀態(tài)轉(zhuǎn)入了release_buff-er,對(duì)應(yīng)功能模塊中的緩沖區(qū)釋放模塊,此狀態(tài)結(jié)束后又轉(zhuǎn)入位查詢狀態(tài),為下一幀信息接收做準(zhǔn)備。
初始化模塊主要在系統(tǒng)上電或重啟后,先對(duì)SJA1000進(jìn)行初始化;位查詢模塊是在初始化完成后,對(duì)SJA1000狀態(tài)寄存器的接收緩沖區(qū)標(biāo)志位不斷進(jìn)行查詢,如果在緩沖區(qū)收到一幀信息后,則轉(zhuǎn)入數(shù)據(jù)處理模塊,否則繼續(xù)進(jìn)行查詢;數(shù)據(jù)處理模塊則是在查詢到接收緩沖區(qū)有數(shù)據(jù)后,讀入幀數(shù)據(jù),并對(duì)幀數(shù)據(jù)進(jìn)行處理;緩沖區(qū)釋放模塊是在一幀信息處理完畢后,釋放緩沖區(qū)空間。
除了上述4個(gè)功能模塊之外,還需要讀寫模塊、雙端口模塊、模塊接口控制邏輯等。
1 讀寫模塊
由SJA1000的數(shù)據(jù)手冊(cè)可知,SJA1000提供的微處理器接口信號(hào)有地址數(shù)據(jù)復(fù)用總線AD0~AD7、地址鎖存信號(hào)ALE、片選信號(hào)![]() 、讀寫使能信號(hào)
、讀寫使能信號(hào)![]() 和
和![]() 、以及復(fù)位信號(hào)
、以及復(fù)位信號(hào)![]() 。
。
SJA1000的數(shù)據(jù)信號(hào)和地址信號(hào)是時(shí)分復(fù)用的,而FPGA中不存在地址的概念,對(duì)于FPGA來(lái)說(shuō),輸出的只有數(shù)據(jù)。因此設(shè)計(jì)的關(guān)鍵就是把S-JA1000中的寄存器地址當(dāng)成數(shù)據(jù)寫入到SJA1000中,配合地址鎖存信號(hào)ALE和寫允許信號(hào)![]() 完成對(duì)SJA1000特定寄存器的命令字寫入。讀寫使能信號(hào)是
完成對(duì)SJA1000特定寄存器的命令字寫入。讀寫使能信號(hào)是![]() 、
、![]() 以及復(fù)位信號(hào)
以及復(fù)位信號(hào)![]() 。設(shè)計(jì)的關(guān)鍵就是把SJA1000中的寄存器地址當(dāng)成數(shù)據(jù)寫入到SJA1000中,配合地址鎖存信號(hào)ALE和寫允許信號(hào)
。設(shè)計(jì)的關(guān)鍵就是把SJA1000中的寄存器地址當(dāng)成數(shù)據(jù)寫入到SJA1000中,配合地址鎖存信號(hào)ALE和寫允許信號(hào)完成對(duì)SJA1000特定寄存器的命令字寫入。與寫操作相似,只需嚴(yán)格按照時(shí)序,將ALE、
![]() 、
、![]() 、
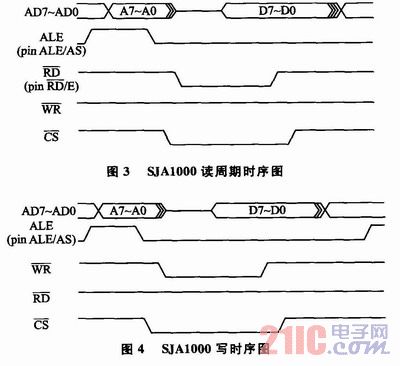
、![]() 引腳的電平互相配合置高或置低,即可完成讀操作。讀寫周期時(shí)序圖如圖3和圖4所示。
引腳的電平互相配合置高或置低,即可完成讀操作。讀寫周期時(shí)序圖如圖3和圖4所示。
設(shè)計(jì)時(shí)采用狀態(tài)機(jī)的形式,由讀寫時(shí)序圖可以看到,與SJA1000讀寫相關(guān)的控制信號(hào)有ALE、![]() 、
、![]() 、
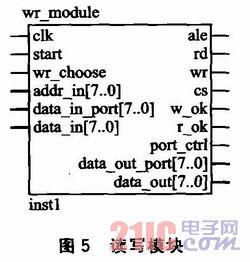
、![]() 。無(wú)論讀寫,都必須先輸出地址,由接口控制邏輯模塊輸入地址。AD[7..0]是數(shù)據(jù)雙向流通的,由雙端口模塊組成,讀寫模塊與之相接口,輸入、輸出設(shè)計(jì)分開(kāi)。讀寫模塊在與接口控制邏輯接口模塊相連接時(shí),輸出的數(shù)據(jù)與輸入的數(shù)據(jù)也設(shè)計(jì)分開(kāi)。同樣讀寫模塊的開(kāi)啟信號(hào)與讀/寫選擇信號(hào)也由接口控制邏輯給出。由QuartuslI生成的讀寫模塊如圖5所示。
。無(wú)論讀寫,都必須先輸出地址,由接口控制邏輯模塊輸入地址。AD[7..0]是數(shù)據(jù)雙向流通的,由雙端口模塊組成,讀寫模塊與之相接口,輸入、輸出設(shè)計(jì)分開(kāi)。讀寫模塊在與接口控制邏輯接口模塊相連接時(shí),輸出的數(shù)據(jù)與輸入的數(shù)據(jù)也設(shè)計(jì)分開(kāi)。同樣讀寫模塊的開(kāi)啟信號(hào)與讀/寫選擇信號(hào)也由接口控制邏輯給出。由QuartuslI生成的讀寫模塊如圖5所示。
在IDLE狀態(tài)等待,當(dāng)4個(gè)功能模塊中需要使用讀寫功能時(shí),由接口控制模塊控制使該功能模塊與讀寫模塊連接,相應(yīng)的功能模塊輸出地址到讀寫模塊,接口控制模塊配合給出讀寫選擇信號(hào),然后進(jìn)入address狀態(tài),輸出地址到SJA1000,判斷讀寫選擇信號(hào)后,進(jìn)入讀狀態(tài)或者寫狀態(tài)。在讀寫子狀態(tài)只需按照時(shí)序圖輸出ale、cs、wr、rd的值即可,標(biāo)志信號(hào)w_ok表示一次讀/寫完成。
在SJA1000的讀寫過(guò)程中,對(duì)各個(gè)信號(hào)的持續(xù)時(shí)間有著嚴(yán)格的要求。以讀操作為例,![]() 信號(hào)的有效持續(xù)時(shí)間必須最大為50 ns,因此在設(shè)計(jì)中,
信號(hào)的有效持續(xù)時(shí)間必須最大為50 ns,因此在設(shè)計(jì)中,![]() 信號(hào)保持低電平的時(shí)間可以比這個(gè)時(shí)間長(zhǎng)。
信號(hào)保持低電平的時(shí)間可以比這個(gè)時(shí)間長(zhǎng)。
2 接口控制邏輯模塊
接口控制邏輯是本系統(tǒng)的核心模塊,它與4個(gè)功能模塊、讀寫模塊相連接,由一個(gè)狀態(tài)機(jī)組成,即系統(tǒng)的主狀態(tài)機(jī)。在狀態(tài)機(jī)的不同狀態(tài)中,控制讀寫狀態(tài)機(jī)與對(duì)應(yīng)的功能模塊相連接,3個(gè)模塊互相配合完成一項(xiàng)功能。QuartuslI生成的模塊圖如6所示。
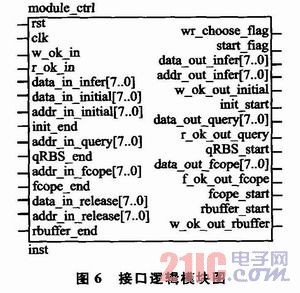
每一個(gè)功能模塊都有對(duì)應(yīng)的接口信號(hào),而data_in_infer、addr_out_infer、data_in_infer、w_ok_in、r_ok_in是讀寫模塊的信號(hào)接口。
需要注意的是,本系統(tǒng)中使用了主從狀態(tài)機(jī),即狀態(tài)機(jī)的嵌套。在主狀態(tài)進(jìn)入初始化狀態(tài)機(jī)后,立即給出一個(gè)enable信號(hào),啟動(dòng)從狀態(tài)機(jī),并設(shè)置一個(gè)從狀態(tài)機(jī)的完成信號(hào)finish(高電平有效),且初始值為低,然后在主狀態(tài)機(jī)不停的檢測(cè)finish信號(hào),如果finish為高,則進(jìn)入下一個(gè)狀態(tài),查詢狀態(tài)。而在從狀態(tài)機(jī)中,則不停地檢測(cè)enable信號(hào),如果為高,則開(kāi)始工作,當(dāng)完成從狀態(tài)機(jī)后,將finish信號(hào)置高。如此就完成了主從狀態(tài)機(jī)的互動(dòng)。接口控制邏輯模塊中的start、end信號(hào)即為系統(tǒng)主從狀態(tài)機(jī)互動(dòng)信號(hào)。
3 初始化模塊
初始化模塊的功能是完成SJA1000的初始化。CAN2.0B規(guī)范允許SJA1000工作在兩種模式,即BasicCAN模式和PeliCAN模式,上電默認(rèn)為BasicCAN模式。在兩種模式下都需要對(duì)SJA1000的模式寄存器CR、驗(yàn)收碼寄存器ACR、驗(yàn)收屏蔽寄存器AMR、總線定時(shí)寄存器BTR0、BTR1和輸出控制寄存器OCR寫入控制命令。
在本設(shè)計(jì)中,借用ROM的思想,將需要讀寫的寄存器地址和數(shù)據(jù)統(tǒng)一編碼,固化存儲(chǔ)起來(lái),對(duì)SJA1000進(jìn)行讀寫時(shí),只需要按照一定的順序讀出數(shù)據(jù)和地址,輸出到即可。
4 位查詢模塊
位查詢模塊主要功能是在SJA1000轉(zhuǎn)入工作模式后能夠讀取存在接受緩沖區(qū)RXFIFO的幀信息,在本設(shè)計(jì)中讀取幀信息采用了查詢方式,即不停地查詢SJA1000狀態(tài)寄存器SR的RBS位,如果查詢到RBS位為“1”,即表明接收緩沖區(qū)滿,RXFIFO中有可用信息,此時(shí)將轉(zhuǎn)入數(shù)據(jù)處理模塊,由數(shù)據(jù)處理模塊進(jìn)行數(shù)據(jù)讀入,并進(jìn)行處理。在查詢過(guò)程中,對(duì)SJA1000的狀態(tài)寄存器進(jìn)行了讀操作。
5 數(shù)據(jù)處理模塊
數(shù)據(jù)處理模塊功能是從SJA1000的緩沖區(qū)讀入數(shù)據(jù),并作處理。在讀入數(shù)據(jù)時(shí),只需將輸出的地址定位到SJA1000接收緩沖區(qū)的數(shù)據(jù)場(chǎng)依次將數(shù)據(jù)從緩沖區(qū)讀入即可。在CAN總線的通信中,發(fā)送的為幀信息,其數(shù)據(jù)幀結(jié)構(gòu)如圖7所示。
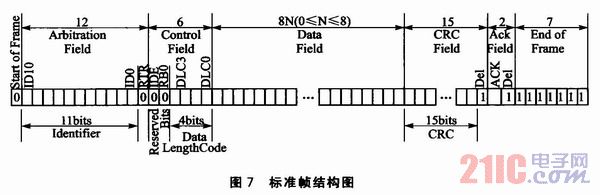
在對(duì)數(shù)據(jù)進(jìn)行處理時(shí),前16位為ID,有用的數(shù)據(jù)是在幀中的數(shù)據(jù)場(chǎng)(Data Field)中,因此只需略過(guò)前16位,對(duì)后面最多8個(gè)字節(jié)的數(shù)據(jù)進(jìn)行處理,分配到步進(jìn)電機(jī)的引腳上即可。
6 緩沖區(qū)釋放模塊與雙端口模塊
在緩沖區(qū)的數(shù)據(jù)被讀入后,需要對(duì)緩沖區(qū)的數(shù)據(jù)清零,為后續(xù)的數(shù)據(jù)讀入做準(zhǔn)備。本質(zhì)上仍是對(duì)SJA1000的命令寄存器(CMR)寫操作。在狀態(tài)寄存器與接收緩沖區(qū)相關(guān)的位為RRB,置1即可釋放緩沖區(qū),這樣就會(huì)導(dǎo)致接收緩沖區(qū)內(nèi)的另一條信息立即有效,從而進(jìn)入下一幀數(shù)據(jù)的數(shù)據(jù)查詢、處理過(guò)程。
在本設(shè)計(jì)中,輸出的數(shù)據(jù)引腳為雙向引腳,設(shè)計(jì)成三態(tài)輸出,這是因?yàn)殡p向端口在完成輸入功能時(shí),必須使端口處于高阻態(tài),否則外部數(shù)據(jù)不能正確讀入。
其設(shè)計(jì)關(guān)鍵在于,實(shí)體部分必須對(duì)端口屬性進(jìn)行申明,端口屬性必須為inout類型,在構(gòu)造體對(duì)輸出信號(hào)進(jìn)行有條件的高阻控制。
結(jié)語(yǔ)
CAN總線接口控制器由VHDL語(yǔ)言描述,易于修改和移植,可以將幾個(gè)軟核集成到一個(gè)FPGA芯片上去,具有單片機(jī)所沒(méi)有的優(yōu)勢(shì),在汽車領(lǐng)域具有良好的應(yīng)用前景。