
摘要:給出了一套基于單片機的多功能起撥道補償控制系統(tǒng)的設(shè)計方法,。該方法以步進(jìn)式搗固車起撥道作業(yè)為基礎(chǔ),,結(jié)合了四點法和三點法的檢測原理與補償原理,因而結(jié)構(gòu)簡單,,操作方便,,并可根據(jù)用戶需求修改作業(yè)參數(shù)。實驗證明,,該系統(tǒng)抗干擾能力強,,穩(wěn)定性好,精度較高,。
關(guān)鍵字:連續(xù)式搗固車,;起撥道補償;單片機
0 引言
我國養(yǎng)路機械的發(fā)展起步較晚,。長期以來,。我國搗固車電氣控制技術(shù)都依靠國外進(jìn)口。由于受制于國外的技術(shù)壟斷,,因而嚴(yán)重阻礙了我國養(yǎng)路機械的發(fā)展進(jìn)程,。為了走自主發(fā)展的道路,打破現(xiàn)有的國外壟斷局面,,擺脫國外技術(shù)的控制,,實現(xiàn)電氣控制系統(tǒng)的國產(chǎn)化,開發(fā)具有自主知識產(chǎn)權(quán)的電氣控制系統(tǒng),,本文針對09-32型連續(xù)式搗固車起撥道的補償控制技術(shù)進(jìn)行了研究,。
傳統(tǒng)的起撥道補償系統(tǒng)大多采用運算電路組成的模擬電路來完成,這種方式控制復(fù)雜,系統(tǒng)精度和穩(wěn)定性都比較差,。為此,本文介紹了一種基于單片機的多功能起撥道補償控制系統(tǒng),,因篇幅原因,,本文僅介紹撥道補償?shù)乃惴ㄔO(shè)計與實驗。
1 撥道補償算法設(shè)計
為了使09-32搗固車達(dá)到更高的效率并提高操作人員的舒適性,,本設(shè)計采用連續(xù)作業(yè)的方式,,其主要的作業(yè)裝置裝在一個可相對移動的衛(wèi)星作業(yè)小車上。在作業(yè)的過程中,,大車一直向前運動,,作業(yè)小車則通過制動系統(tǒng)停下來作業(yè)。作業(yè)完成后再加速趕上大車,。由于測量系統(tǒng)中的C點將隨作業(yè)小車的位置不斷變化而變化,,C點的撥道正矢也隨C點變化,因此,,為了準(zhǔn)確撥道,,設(shè)計時就必須加一個補償值。
1.1 四點法補償算法設(shè)計
圖1所示是四點法補償算法的原理圖,。設(shè)衛(wèi)星作業(yè)小車由C點移動距離x后到達(dá)點C’,,C點正矢設(shè)為H1,C’的正矢設(shè)為*****,,B點的正矢為H2,,D點的方向偏移距離為FD。圖1中的“1”表示正確的圓曲線位置,; “2”表示有方向偏差的圓曲線,;“3”表示整正后的圓曲線。
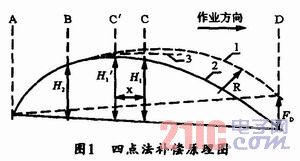
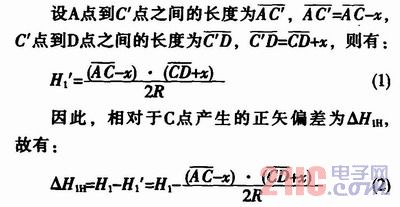
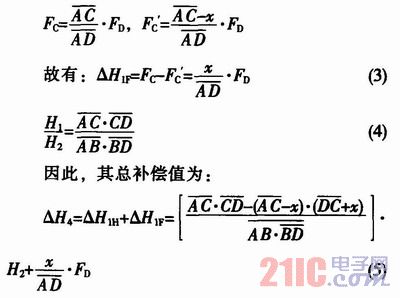
設(shè)由D點的方向偏移所產(chǎn)生的補償值為△H1F,,C點產(chǎn)生的偏移誤差為FC,,C’的偏移誤差為![]() ,那么,,根據(jù)相似三角形的比例關(guān)系可知
,那么,,根據(jù)相似三角形的比例關(guān)系可知
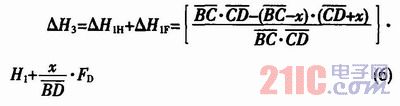
1.2 三點法補償算法設(shè)計
三點法和四點法相比,,其少了一個檢測點A,其余的檢測原理與補償原理都相同,,同理,,就可推出系統(tǒng)的總補償值為:
2 起撥道補償控制系統(tǒng)
2.1 起撥道控制系統(tǒng)的系統(tǒng)構(gòu)成
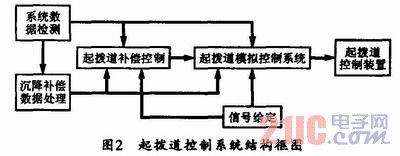
搗固車進(jìn)行起撥道作業(yè)時,首先應(yīng)進(jìn)行線路各參數(shù)的檢測,,再結(jié)合沉降補償,、曲線修正、作業(yè)小車移動補償?shù)冗M(jìn)行計算處理,從而得到正確的起道值和撥道值,,最終控制起撥道裝置對線路進(jìn)行起撥道作業(yè),,其系統(tǒng)框圖如圖2所示。
2.2 起撥道補償控制系統(tǒng)要求
由模擬控制系統(tǒng)可知,,起撥道補償控制系統(tǒng)主要包括模擬量輸入輸出,、數(shù)字量輸入以及外部中斷信號。模擬量輸入包括7路:即衛(wèi)星小車位置,、左前起道量,、右前起道量、后擺超高差,、作業(yè)點理論正矢,、前端偏移、模擬地,;模擬量輸出有3路:包括左起道補償值,、右起道補償值、撥道補償值,;此外有2路數(shù)字量輸入,,即左超高信號和衛(wèi)星小車在后位信號。
對于系統(tǒng)的輸入信號范圍,,由于其左右起道量的轉(zhuǎn)換關(guān)系為50 mV/mm,,故根據(jù)最大起道量可得出其輸入電壓范圍為±7.5 V;而作業(yè)點的理論正矢傳感器轉(zhuǎn)換關(guān)系為25 mV/mm,,故其輸入電壓范圍為±3.75 V,;衛(wèi)星小車位置可根據(jù)衛(wèi)星小車驅(qū)動控制板位移傳感器得出,其輸入電壓范圍為±10 V,;此外,,其前端偏移量轉(zhuǎn)換關(guān)系為50mV/mm,輸入電壓范圍為±7.5 V,。
而對于系統(tǒng)的輸出信號范圍,,可根據(jù)補償算法反推,其輸出信號范圍為-3.1387~+1.046 V,。
3 起撥道補償系統(tǒng)的硬件設(shè)計
3.1 硬件電路結(jié)構(gòu)
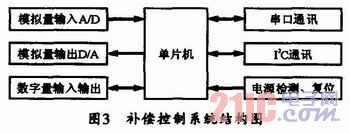
根據(jù)系統(tǒng)需求,,本文設(shè)計的基于單片機的多功能起撥道補償控制系統(tǒng)的系統(tǒng)結(jié)構(gòu)如圖3所示。該系統(tǒng)以單片機為控制核心,,外加模擬量采樣輸入單元A/D,、模擬量輸出單元D/A、數(shù)字量輸入單元8255A,、I2C通訊單元,、串口通訊單元以及其他外圍電路構(gòu)成。該系統(tǒng)具有可視化操作界面,可將不同車型的作業(yè)參數(shù)通過串口通訊的方式在顯示器上顯示出來,,并可通過鍵盤修改作業(yè)參數(shù),,參數(shù)修改值可通過I2C通訊方式保存到一片EEPROM24C08存儲器中,從而可保證前后作業(yè)參數(shù)的一致性,。
3.2 電路器件說明
系統(tǒng)的單片機采用的是DALLAS公司生產(chǎn)的DS80C320,,該單片機與8051單片機的引腳和指令集均兼容。因其采用CHMOS工藝,,因而具有高速度,、高密度,、低功耗等特點,。DS80C320具有256個字節(jié)的內(nèi)部數(shù)據(jù)存儲單元,其最大尋址能力為64 KB ROM和64 KB RAM,,指令周期可由8031的12個機器周期縮短為4個,,最高時鐘頻率為33 MHz,故可大大縮短指令周期,,滿足系統(tǒng)的高速要求,,同時具有雙數(shù)據(jù)指針,可利用雙數(shù)據(jù)
指針進(jìn)行數(shù)據(jù)的快速移動,,這一點在菜單修改和顯示時尤其重要,,此外,DS80C320還具有可編程看門狗定時器和斷電預(yù)警中斷功能,。
系統(tǒng)中的模擬量輸入單元采用BURRBROWN公司的A/D轉(zhuǎn)換芯片ADS7805和8通道多路選擇開關(guān)組成,,并通過程序控制來實現(xiàn)對各通道模擬量的采樣與轉(zhuǎn)換。ADS7805采用先進(jìn)的CMOS結(jié)構(gòu),,是一個完整的16位A/D轉(zhuǎn)換器,,其輸入電壓范圍為±10 V,可滿足系統(tǒng)輸入電壓范圍的要求,,ADS7803的采樣頻率為100 kHz,,且轉(zhuǎn)換精度高(ILSB=0.305 mV),其最大積分非線性度為±3LSB,,可滿足系統(tǒng)精度要求和信號范圍的要求,。
模擬量輸出單元采用AD公司的D/A轉(zhuǎn)換芯片AD7841,該芯片的基準(zhǔn)電源為±5 V,,具有14位并行數(shù)據(jù)輸入,,分辨率為14位,因而分辨率高(1LSB=1.22mV),,并可輸出8路模擬信號,,輸出電壓范圍為-10~10 V。
4 系統(tǒng)軟件設(shè)計與試驗結(jié)果
4.1 軟件設(shè)計
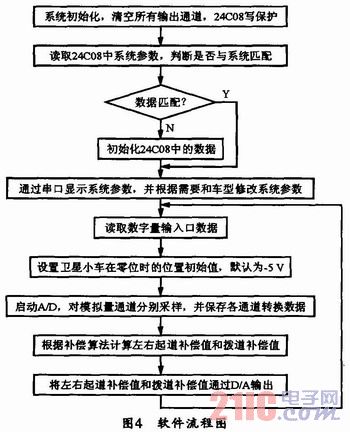
本文介紹的起撥道補償系統(tǒng)控制軟件的主要功能包括串口菜單顯示、通過菜單修改作業(yè)參數(shù),、外部信號采樣輸入,、補償計算、數(shù)據(jù)處理以及信號輸出等,。其軟件流程如圖4所示,。
4.2 實驗結(jié)果
筆者分別用三點法和四點法對本設(shè)計進(jìn)行了撥道補償測試。測試時假設(shè)衛(wèi)星小車零點在后,,前端偏移為20 mm,,作業(yè)點理論正矢為30 mm,測試中,,衛(wèi)星小車的位置從-10 V到+10 V變化,,每次給定的移動距離變化量為1 V(100 mm),檢測弦線BC長度為4700 mm,,BD14750 mm,,AD為20750 mm,表1所列是三點法撥道補償?shù)臏y試結(jié)果,。
從表1可見,,三點法撥道補償值的最大誤差值為0.06 mm。
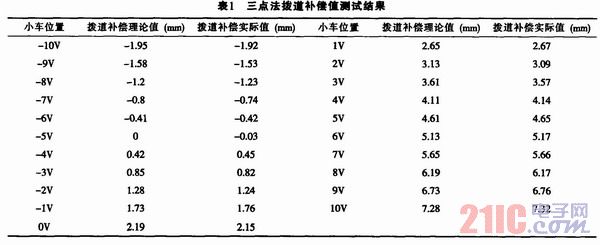
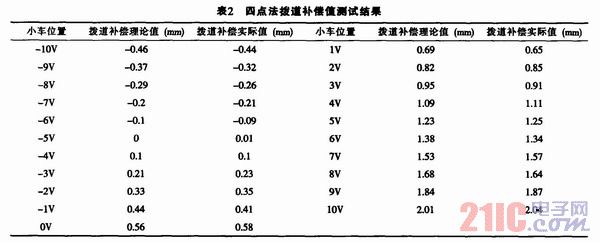
表2所列是四點法撥道補償值的測試結(jié)果數(shù)據(jù),。從表2所列數(shù)據(jù)可以看出,,四點法撥道補償值的最大誤差為0.04mm。
5 結(jié)束語
事實上,,這種多功能起撥道補償系統(tǒng)在實際應(yīng)用中還加入了硬件抗干擾措施和軟件抗干擾措施,。為了提高系統(tǒng)的穩(wěn)定性和精度,對模擬量輸入還采用硬件濾波和軟件濾波等方法來減小誤差,,由表1和表2中的數(shù)據(jù)可知,,三點法補償?shù)淖畲笳`差為0.06 mm,四點法補償?shù)淖畲笳`差為0.04mm,,可見系統(tǒng)的穩(wěn)定性強,,精度較高。目前,,該補償系統(tǒng)已投入生產(chǎn),。