
1 引言
為了緩解交通壓力,降低修路資金投入,減少車輛延誤,節(jié)能減排,設(shè)計(jì)智能交通控制是建設(shè)資源節(jié)約型社會(huì)的必然選擇。本文設(shè)計(jì)了一種基于RFID的智能交通控制,采用RFID 技術(shù)檢測(cè)交叉路口附近的車輛,智能交通控制信號(hào)機(jī)根據(jù)采集到的車輛信息,選擇合適的路口控制模式自適應(yīng)地控制車輛通行時(shí)間,從而保證車輛通行質(zhì)量。
2 路口控制模式
傳統(tǒng)的路口控制模式是定時(shí)控制,路*通信號(hào)燈的延時(shí)時(shí)間是固定的,不能根據(jù)車輛的流量自適應(yīng)地動(dòng)態(tài)調(diào)節(jié)延時(shí)時(shí)間,從而造成車輛延誤時(shí)間長(zhǎng)及不必要的擁塞等情況。先進(jìn)的路口控制模式有模糊控制、綠波帶模式、夜間模式和急停模式。模糊控制模式根據(jù)隨機(jī)的車輛流量智能完成模糊增減交通信號(hào)控制時(shí)間。綠波帶模式在單向車輛高峰期時(shí)將各個(gè)路口間紅綠燈起始點(diǎn)亮?xí)r間延宕一定量來(lái)保證車輛一路暢行。夜間控制模式在夜晚車輛流量為零負(fù)荷的狀態(tài)使用,僅使用黃燈警示開車司機(jī),減少能源和時(shí)間的消耗。急停模式為緊急車輛開辟通行空間,在緊急車輛方向開啟綠燈,別的方向開啟紅燈。本設(shè)計(jì)提出在不同的時(shí)段采用不同的控制模式,在9: 00- 11: 30,14: 30- 17: 30和20: 30- 24: 00時(shí)段采用模糊控制模式; 在5: 30- 9: 00,11: 30- 14: 30和17: 30- 20: 30時(shí)段采用綠波帶模式; 在0: 00- 5: 30時(shí)段采用夜間控制模式; 在檢測(cè)到緊急車輛時(shí)采用急停控制模式。選擇多種控制模式可以實(shí)現(xiàn)交通控制的合理化,從實(shí)際上緩解交通路口的壓力。具體的時(shí)段設(shè)置可以根據(jù)具體的區(qū)域或車輛流量由信號(hào)機(jī)重設(shè)或修改。
3 智能交通控制設(shè)計(jì)
3. 1 智能交通控制信號(hào)機(jī)設(shè)
3 .1 .1 信號(hào)機(jī)硬件設(shè)計(jì):
國(guó)內(nèi)信號(hào)機(jī)主要分為2類: 一類采用8 /16位單片機(jī)作為處理器,功能簡(jiǎn)單、方案單一,難以實(shí)現(xiàn)區(qū)域交通協(xié)調(diào)控制,不能適應(yīng)現(xiàn)代化交通控制的要求; 另一類是基于工控機(jī)或PC104,功能雖然強(qiáng)大,但由于工控機(jī)和PC104都是按通用計(jì)算機(jī)標(biāo)準(zhǔn)設(shè)計(jì),并非專門針對(duì)信號(hào)機(jī)應(yīng)用設(shè)計(jì),硬件結(jié)構(gòu)復(fù)雜,成本高。國(guó)外的信號(hào)機(jī)(如西門子公司的2070和美國(guó)的EAGLE )起步早,水平高,但不適用于中國(guó)混合交通模式,且價(jià)格昂貴,操作不方便。本文選擇基于ARM 核的32位嵌入式R ISC 處理器S3C44B0X進(jìn)行智能交通信號(hào)機(jī)硬件設(shè)計(jì),以達(dá)到采集與處理交通流數(shù)據(jù)、通信聯(lián)網(wǎng)以及區(qū)域協(xié)調(diào)控制的設(shè)計(jì)目的,信號(hào)機(jī)硬件結(jié)構(gòu)如圖1所示。
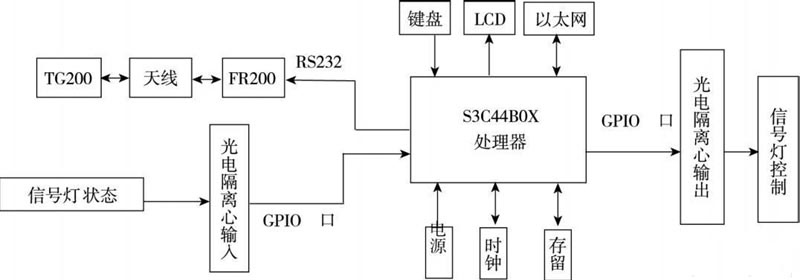
圖1 信號(hào)機(jī)硬件結(jié)構(gòu)
信號(hào)機(jī)需要存放引導(dǎo)程序、操作系統(tǒng)和應(yīng)用程序等數(shù)據(jù),系統(tǒng)啟動(dòng)后操作系統(tǒng)和程序運(yùn)行需要更大的空間,因此設(shè)計(jì)外存儲(chǔ)單元以擴(kuò)展存儲(chǔ)空間,存儲(chǔ)器模塊包括8MB的SDRAM、2MB的NorFlash和16MB的N andFlash。存儲(chǔ)器用來(lái)存儲(chǔ)時(shí)段、相位等其他參數(shù)。信號(hào)機(jī)要采集車輛流量信息,車輛流量檢測(cè)模塊由射頻標(biāo)簽、天線和射頻讀寫器組成。設(shè)計(jì)中射頻標(biāo)簽為TG200,射頻讀寫器為FR200。S3C44B0x沒(méi)有集成網(wǎng)絡(luò)控制器,故選用NE2000兼容的以太網(wǎng)控制器芯片RTL8019來(lái)擴(kuò)展以太網(wǎng)。液晶顯示與鍵盤模塊用來(lái)手動(dòng)設(shè)置或者修改交通信號(hào)機(jī)的控制參數(shù)。通過(guò)ZLG7290B擴(kuò)展一個(gè)4 4的鍵盤矩陣,ZLG7290B 通過(guò)IIC串行總線與處理器進(jìn)行連接; S3C44B0X內(nèi)置LCD驅(qū)動(dòng)控制器,能夠自動(dòng)產(chǎn)生LCD 驅(qū)動(dòng)控制所需的控制信號(hào),因此S3C44B0X可以與LCD直接連接,而不需要另外加LCD控制器。系統(tǒng)還設(shè)計(jì)了電源模塊、RTC (實(shí)時(shí)時(shí)鐘)模塊等。設(shè)計(jì)的信號(hào)機(jī)具有控制參數(shù)輸入、保存、控制狀態(tài)輸出、燈態(tài)輸出控制、交通參數(shù)實(shí)時(shí)檢測(cè)與存儲(chǔ)、配時(shí)方案存儲(chǔ)、倒計(jì)時(shí)牌控制、以太網(wǎng)及與手持終端通訊等功能。
3 .1 .2 信號(hào)機(jī)軟件設(shè)計(jì)
信號(hào)機(jī)利用中斷方式接收交通參數(shù)和發(fā)布控制指令。現(xiàn)代智能信號(hào)機(jī)需要同時(shí)執(zhí)行信號(hào)燈色狀態(tài)、相位與倒計(jì)時(shí)控制、配時(shí)優(yōu)化、通訊和車流量檢測(cè)等多個(gè)任務(wù)。為了解決多任務(wù)同時(shí)運(yùn)行所帶來(lái)的程序結(jié)構(gòu)混亂、功能受限、效率低下等問(wèn)題,引入嵌入式操作系統(tǒng)uC linux 以支持多種文件系統(tǒng)、模塊化設(shè)計(jì)和基于計(jì)算機(jī)網(wǎng)絡(luò)的通信。uC linux內(nèi)核可以完成進(jìn)程管理、內(nèi)存管理、文件系統(tǒng)、設(shè)備控制和網(wǎng)絡(luò)實(shí)現(xiàn)等功能,內(nèi)核采用模塊化設(shè)計(jì),許多功能塊可以獨(dú)立地增加或刪除,當(dāng)重新編譯內(nèi)核時(shí),選擇嵌入式設(shè)備所需要的功能模塊,刪除冗余的功能模塊。通過(guò)重新配置內(nèi)核,可以減小系統(tǒng)運(yùn)行所需要的內(nèi)核,縮減資源使用量,從而顯著減少系統(tǒng)運(yùn)行所需的硬件資源。
信號(hào)機(jī)軟件由系統(tǒng)監(jiān)控、車流量采集、路口控制模式選擇、配時(shí)、鍵盤掃描與液晶顯示模塊構(gòu)成。基于uC linux的信號(hào)機(jī)軟件結(jié)構(gòu)如圖2所示。

圖2 信號(hào)機(jī)軟件結(jié)構(gòu)
1 引言
為了緩解交通壓力,降低修路資金投入,減少車輛延誤,節(jié)能減排,設(shè)計(jì)智能交通控制是建設(shè)資源節(jié)約型社會(huì)的必然選擇。本文設(shè)計(jì)了一種基于RFID的智能交通控制,采用RFID 技術(shù)檢測(cè)交叉路口附近的車輛,智能交通控制信號(hào)機(jī)根據(jù)采集到的車輛信息,選擇合適的路口控制模式自適應(yīng)地控制車輛通行時(shí)間,從而保證車輛通行質(zhì)量。
2 路口控制模式
傳統(tǒng)的路口控制模式是定時(shí)控制,路*通信號(hào)燈的延時(shí)時(shí)間是固定的,不能根據(jù)車輛的流量自適應(yīng)地動(dòng)態(tài)調(diào)節(jié)延時(shí)時(shí)間,從而造成車輛延誤時(shí)間長(zhǎng)及不必要的擁塞等情況。先進(jìn)的路口控制模式有模糊控制、綠波帶模式、夜間模式和急停模式。模糊控制模式根據(jù)隨機(jī)的車輛流量智能完成模糊增減交通信號(hào)控制時(shí)間。綠波帶模式在單向車輛高峰期時(shí)將各個(gè)路口間紅綠燈起始點(diǎn)亮?xí)r間延宕一定量來(lái)保證車輛一路暢行。夜間控制模式在夜晚車輛流量為零負(fù)荷的狀態(tài)使用,僅使用黃燈警示開車司機(jī),減少能源和時(shí)間的消耗。急停模式為緊急車輛開辟通行空間,在緊急車輛方向開啟綠燈,別的方向開啟紅燈。本設(shè)計(jì)提出在不同的時(shí)段采用不同的控制模式,在9: 00- 11: 30,14: 30- 17: 30和20: 30- 24: 00時(shí)段采用模糊控制模式; 在5: 30- 9: 00,11: 30- 14: 30和17: 30- 20: 30時(shí)段采用綠波帶模式; 在0: 00- 5: 30時(shí)段采用夜間控制模式; 在檢測(cè)到緊急車輛時(shí)采用急停控制模式。選擇多種控制模式可以實(shí)現(xiàn)交通控制的合理化,從實(shí)際上緩解交通路口的壓力。具體的時(shí)段設(shè)置可以根據(jù)具體的區(qū)域或車輛流量由信號(hào)機(jī)重設(shè)或修改。
3 智能交通控制設(shè)計(jì)
3. 1 智能交通控制信號(hào)機(jī)設(shè)
3 .1 .1 信號(hào)機(jī)硬件設(shè)計(jì):
國(guó)內(nèi)信號(hào)機(jī)主要分為2類: 一類采用8 /16位單片機(jī)作為處理器,功能簡(jiǎn)單、方案單一,難以實(shí)現(xiàn)區(qū)域交通協(xié)調(diào)控制,不能適應(yīng)現(xiàn)代化交通控制的要求; 另一類是基于工控機(jī)或PC104,功能雖然強(qiáng)大,但由于工控機(jī)和PC104都是按通用計(jì)算機(jī)標(biāo)準(zhǔn)設(shè)計(jì),并非專門針對(duì)信號(hào)機(jī)應(yīng)用設(shè)計(jì),硬件結(jié)構(gòu)復(fù)雜,成本高。國(guó)外的信號(hào)機(jī)(如西門子公司的2070和美國(guó)的EAGLE )起步早,水平高,但不適用于中國(guó)混合交通模式,且價(jià)格昂貴,操作不方便。本文選擇基于ARM 核的32位嵌入式R ISC 處理器S3C44B0X進(jìn)行智能交通信號(hào)機(jī)硬件設(shè)計(jì),以達(dá)到采集與處理交通流數(shù)據(jù)、通信聯(lián)網(wǎng)以及區(qū)域協(xié)調(diào)控制的設(shè)計(jì)目的,信號(hào)機(jī)硬件結(jié)構(gòu)如圖1所示。
圖1 信號(hào)機(jī)硬件結(jié)構(gòu)
信號(hào)機(jī)需要存放引導(dǎo)程序、操作系統(tǒng)和應(yīng)用程序等數(shù)據(jù),系統(tǒng)啟動(dòng)后操作系統(tǒng)和程序運(yùn)行需要更大的空間,因此設(shè)計(jì)外存儲(chǔ)單元以擴(kuò)展存儲(chǔ)空間,存儲(chǔ)器模塊包括8MB的SDRAM、2MB的NorFlash和16MB的N andFlash。存儲(chǔ)器用來(lái)存儲(chǔ)時(shí)段、相位等其他參數(shù)。信號(hào)機(jī)要采集車輛流量信息,車輛流量檢測(cè)模塊由射頻標(biāo)簽、天線和射頻讀寫器組成。設(shè)計(jì)中射頻標(biāo)簽為TG200,射頻讀寫器為FR200。S3C44B0x沒(méi)有集成網(wǎng)絡(luò)控制器,故選用NE2000兼容的以太網(wǎng)控制器芯片RTL8019來(lái)擴(kuò)展以太網(wǎng)。液晶顯示與鍵盤模塊用來(lái)手動(dòng)設(shè)置或者修改交通信號(hào)機(jī)的控制參數(shù)。通過(guò)ZLG7290B擴(kuò)展一個(gè)4 4的鍵盤矩陣,ZLG7290B 通過(guò)IIC串行總線與處理器進(jìn)行連接; S3C44B0X內(nèi)置LCD驅(qū)動(dòng)控制器,能夠自動(dòng)產(chǎn)生LCD 驅(qū)動(dòng)控制所需的控制信號(hào),因此S3C44B0X可以與LCD直接連接,而不需要另外加LCD控制器。系統(tǒng)還設(shè)計(jì)了電源模塊、RTC (實(shí)時(shí)時(shí)鐘)模塊等。設(shè)計(jì)的信號(hào)機(jī)具有控制參數(shù)輸入、保存、控制狀態(tài)輸出、燈態(tài)輸出控制、交通參數(shù)實(shí)時(shí)檢測(cè)與存儲(chǔ)、配時(shí)方案存儲(chǔ)、倒計(jì)時(shí)牌控制、以太網(wǎng)及與手持終端通訊等功能。
3 .1 .2 信號(hào)機(jī)軟件設(shè)計(jì)
信號(hào)機(jī)利用中斷方式接收交通參數(shù)和發(fā)布控制指令。現(xiàn)代智能信號(hào)機(jī)需要同時(shí)執(zhí)行信號(hào)燈色狀態(tài)、相位與倒計(jì)時(shí)控制、配時(shí)優(yōu)化、通訊和車流量檢測(cè)等多個(gè)任務(wù)。為了解決多任務(wù)同時(shí)運(yùn)行所帶來(lái)的程序結(jié)構(gòu)混亂、功能受限、效率低下等問(wèn)題,引入嵌入式操作系統(tǒng)uC linux 以支持多種文件系統(tǒng)、模塊化設(shè)計(jì)和基于計(jì)算機(jī)網(wǎng)絡(luò)的通信。uC linux內(nèi)核可以完成進(jìn)程管理、內(nèi)存管理、文件系統(tǒng)、設(shè)備控制和網(wǎng)絡(luò)實(shí)現(xiàn)等功能,內(nèi)核采用模塊化設(shè)計(jì),許多功能塊可以獨(dú)立地增加或刪除,當(dāng)重新編譯內(nèi)核時(shí),選擇嵌入式設(shè)備所需要的功能模塊,刪除冗余的功能模塊。通過(guò)重新配置內(nèi)核,可以減小系統(tǒng)運(yùn)行所需要的內(nèi)核,縮減資源使用量,從而顯著減少系統(tǒng)運(yùn)行所需的硬件資源。
信號(hào)機(jī)軟件由系統(tǒng)監(jiān)控、車流量采集、路口控制模式選擇、配時(shí)、鍵盤掃描與液晶顯示模塊構(gòu)成。基于uC linux的信號(hào)機(jī)軟件結(jié)構(gòu)如圖2所示。
圖2 信號(hào)機(jī)軟件結(jié)構(gòu)
3 .2 基于RFID技術(shù)的車輛檢測(cè)
3 .2 .1基于RFID 的車輛檢測(cè)方案
射頻識(shí)別( Radio Frequency Ident ification) 技術(shù)是一種非接觸的自動(dòng)識(shí)別技術(shù),它利用射頻信號(hào)和空間耦合(電感和電磁耦合)傳輸特性,在讀卡器和射頻卡之間進(jìn)行無(wú)線雙向通信,實(shí)現(xiàn)對(duì)被識(shí)別物體的自動(dòng)識(shí)別[ 8] 。最基本的RF ID系統(tǒng)由讀寫器、天線、電子標(biāo)簽三部分組成。RFID 采用存儲(chǔ)在電子標(biāo)簽中的唯一的ID標(biāo)識(shí)物體,讀寫器自動(dòng)高速地收集識(shí)別范圍內(nèi)的標(biāo)簽信息數(shù)據(jù),從而實(shí)現(xiàn)自動(dòng)識(shí)別物品和收集物品標(biāo)志信息的功能。因此,RFID技術(shù)對(duì)任何移動(dòng)對(duì)象都可以進(jìn)行實(shí)時(shí)的定位、跟蹤和監(jiān)測(cè)。
在智能交通控制過(guò)程中,信號(hào)機(jī)要根據(jù)實(shí)時(shí)采集的車輛信息來(lái)選擇路口控制模式,本設(shè)計(jì)基于RF ID 技術(shù)進(jìn)行車輛檢測(cè)。這種方案無(wú)須對(duì)現(xiàn)有紅綠燈設(shè)備進(jìn)行拆卸,只需對(duì)車輛粘貼相應(yīng)的電子標(biāo)簽,在原有紅綠燈基礎(chǔ)上安裝RFID 讀寫設(shè)備及調(diào)整信號(hào)燈控制器軟件。在車輛前擋風(fēng)玻璃上粘貼RFID 標(biāo)簽,在交叉路口四個(gè)方向的紅綠燈前50米- 70米安裝RFID 讀寫器,讀寫器斜對(duì)馬路(擴(kuò)大接收范圍) ,檢測(cè)交叉路口附近的車輛流量,根據(jù)采集的車輛數(shù)據(jù),選擇合適的控制模式并調(diào)節(jié)信號(hào)燈。當(dāng)某個(gè)相位的車輛流量比其他相位大且該相位綠燈亮?xí)r,則適當(dāng)?shù)匮娱L(zhǎng)該相位的綠燈周期(綠燈周期不超過(guò)最大綠燈周期) ,保證車輛有充裕的時(shí)間通過(guò)路口; 如果該相位紅燈亮,則適當(dāng)?shù)乜s短紅燈周期(紅燈周期不小于最小紅燈周期) ,減少車輛等候時(shí)間,盡可能減少車輛在交叉口的延誤的時(shí)間。
由于城市道路情況復(fù)雜,很容易對(duì)標(biāo)簽卡的微波信號(hào)進(jìn)行反射衍射,為防止同一RFID 卡號(hào)被多個(gè)讀卡器讀取到,從而導(dǎo)致車輛檢測(cè)錯(cuò)誤,通過(guò)軟件進(jìn)行設(shè)定,一旦讀到RFID 卡信號(hào),則后續(xù)讀卡器在規(guī)定時(shí)間內(nèi)(如30秒)對(duì)此RFID卡號(hào)進(jìn)行屏蔽,這樣可以避免同一ID 號(hào)被一條馬路上兩臺(tái)讀卡器讀到后對(duì)信息的誤判。
將每輛車的RFID 卡的ID號(hào)作為關(guān)鍵字段建立數(shù)據(jù)庫(kù)。將車輛的ID 號(hào)與車牌號(hào)關(guān)聯(lián)可以建立車輛有關(guān)參數(shù)數(shù)據(jù)庫(kù),主要包括車型、發(fā)動(dòng)機(jī)號(hào)、底盤號(hào)、出廠日期、年審時(shí)限、養(yǎng)路費(fèi)交納時(shí)限以及違章記錄等; 通過(guò)車牌號(hào)與車主的對(duì)應(yīng)關(guān)系,可以建立車主有關(guān)信息數(shù)據(jù)庫(kù),主要包括姓名、年齡、性別、單位、戶籍以及聯(lián)系電話(包括固定電話和移動(dòng)電話)等。在確立了基本參數(shù)庫(kù)后,針對(duì)車輛的一些運(yùn)行情況,還設(shè)置了一些記錄車輛違章時(shí)間及地點(diǎn)等參數(shù)的字段; 在數(shù)據(jù)庫(kù)中還建立一些圖形文件庫(kù),可以記錄車輛照片、車主照片以及車輛違章照片。數(shù)據(jù)庫(kù)中還建立車輛的優(yōu)先權(quán)限,公交車輛設(shè)置為普通優(yōu)先,特殊車輛(如消防車,急救車,警車)設(shè)置為絕對(duì)優(yōu)先。一旦檢測(cè)到特殊車輛的標(biāo)簽信號(hào),則采用急停控制模式,絕對(duì)綠燈,保證特殊車輛順暢通行。
3 .2 .2 基于RFID 的車輛檢測(cè)實(shí)現(xiàn)
本設(shè)計(jì)采用有源標(biāo)簽TG200來(lái)標(biāo)識(shí)車輛,F(xiàn)R200多功能RFID 讀寫器來(lái)讀取RFID 卡信息,TG200 和FR200的工作頻率為433MH z,最大識(shí)別距離為150米,通信速率為250Kbps,具有投入成本低、可靠性高,安全性高、維護(hù)簡(jiǎn)便、安裝實(shí)施簡(jiǎn)單等優(yōu)點(diǎn)。RFID 讀寫器通過(guò)RS232接口與S3C44B0x 處理器連接,處理器負(fù)責(zé)完成PC 和FR200讀寫器之間數(shù)據(jù)的傳送和控制。
RFID 數(shù)據(jù)采集模塊包括: 天線、RF發(fā)送電路及RF接收電路、解調(diào)電路、電源、外部通信接口等,其外部通信接口最終輸出正確的RFID 卡ID 信息。RFID 數(shù)據(jù)采集與處理流程圖如圖3 所示。車輛檔案數(shù)據(jù)(如車號(hào)、單位、優(yōu)先權(quán)限等)統(tǒng)一存儲(chǔ)在一個(gè)file tx t的文件中,作為數(shù)據(jù)識(shí)別進(jìn)程的數(shù)據(jù)依據(jù),判斷電子標(biāo)簽ID信息是否合法。如果判斷電子標(biāo)簽ID 信息為NULL,則進(jìn)行報(bào)警提示等處理; 如果判斷電子標(biāo)簽ID 信息為特殊車輛數(shù)據(jù),則進(jìn)行優(yōu)先控制、數(shù)據(jù)保存等。RFID 信息、采集時(shí)間、地點(diǎn)等數(shù)據(jù)按格式保存在一個(gè)* tx t文件中。最后,服務(wù)器通過(guò)以太網(wǎng)與路口控制終端設(shè)備建立TCP / IP連接,路口控制終端設(shè)備將保存的文件上傳至服務(wù)器供管理系統(tǒng)處理。上傳成功的文件將從本地F lash中刪除,本地Flash由于容量有限,采用輪循存儲(chǔ)的辦法,保存的數(shù)據(jù)超出50MB 后,將從存儲(chǔ)范圍的開始處往后覆蓋原來(lái)的文件。
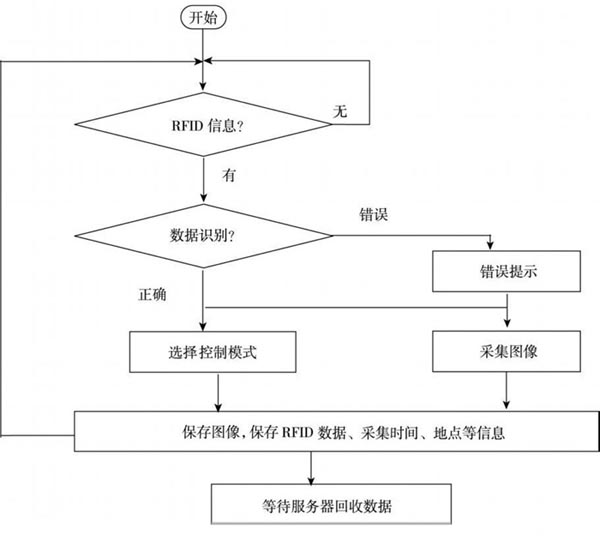
圖3 RFID數(shù)據(jù)采集與處理流程圖
4 結(jié)束語(yǔ)
本文提出了一種基于RFID 的智能交通控制設(shè)計(jì),在不同的時(shí)段采用不同的路口控制模式,基于S3C44B0X處理器和uC linux操作系統(tǒng)開發(fā)智能交通控制信號(hào)機(jī),采用有源標(biāo)簽TG200來(lái)標(biāo)識(shí)車輛,在原有紅綠燈基礎(chǔ)上安裝FR200多功能RFID讀寫器來(lái)讀取RFID卡信息,由路口控制終端對(duì)RFID讀寫器采集到的RFID數(shù)據(jù)進(jìn)行處理來(lái)實(shí)現(xiàn)車輛智能控制功能。