
摘要:針對(duì)交流異步電機(jī)的特性,設(shè)計(jì)了一套基于DSP的交流異步電機(jī)高精度調(diào)速系統(tǒng)。系統(tǒng)應(yīng)用矢量控制技術(shù)作為系統(tǒng)的總體控制方案,以TI公司電機(jī)控制專用的高速數(shù)字信號(hào)處理器(DSP)TMS320F2812為系統(tǒng)的核心處理器,三菱電機(jī)公司的PS21246智能功率模塊(IPM)為逆變器件,在此基礎(chǔ)上運(yùn)用空間電壓矢量脈寬調(diào)制技術(shù)和模糊PI控制算法,構(gòu)建了一個(gè)基于TMS320F2812 DSP的交流異步電機(jī)高精度控制平臺(tái)。
關(guān)鍵詞:DSP;IPM;矢量控制;SVPWM;模糊PI
近20年來(lái),隨著新型電力電子器件的出現(xiàn),控制器也實(shí)現(xiàn)了從8位單片機(jī)到32位DSP的轉(zhuǎn)變,特別是新型控制方法的出現(xiàn),如:矢量控制、直接轉(zhuǎn)矩控制以及模糊控制等,使得高精度交流異步電機(jī)調(diào)速系統(tǒng)實(shí)現(xiàn)成為可能。矢量控制具有轉(zhuǎn)矩平滑,調(diào)速范圍寬的特點(diǎn)。空間矢量脈寬調(diào)制技術(shù)(space vector PWM,SVPWM)物理概念清晰,電機(jī)脈動(dòng)轉(zhuǎn)矩小,直流電壓利用率高,且易于實(shí)現(xiàn)。本文設(shè)計(jì)并實(shí)現(xiàn)了一套基于DSP的高精度交流調(diào)速系統(tǒng),系統(tǒng)采用高速DSP芯片TMS320F2812作為核心,基于矢量控制與SVPWM相結(jié)合的控制方式,利用TMS320F2812芯片的事件管理器模塊(event manager,EV)產(chǎn)生對(duì)稱SVPWM脈沖,逆變器則采用智能功率模塊(intelligent power module,IPM),保證了系統(tǒng)可靠性。在此基礎(chǔ)上綜合模糊PI控制算法,最終設(shè)計(jì)并構(gòu)建了基于DSP的高精度交流調(diào)速系統(tǒng)。
1 系統(tǒng)的硬件總體設(shè)計(jì)
系統(tǒng)為基于高性能處理器的全數(shù)字交流調(diào)速系統(tǒng),利用處理器實(shí)現(xiàn)對(duì)電機(jī)的速度環(huán)和電流環(huán)控制,與傳統(tǒng)的模擬調(diào)速系統(tǒng)相比,有著結(jié)構(gòu)簡(jiǎn)單、功能靈活多樣、抗干擾能力強(qiáng)等優(yōu)點(diǎn)。圖1為交流調(diào)速系統(tǒng)的結(jié)構(gòu)框圖。
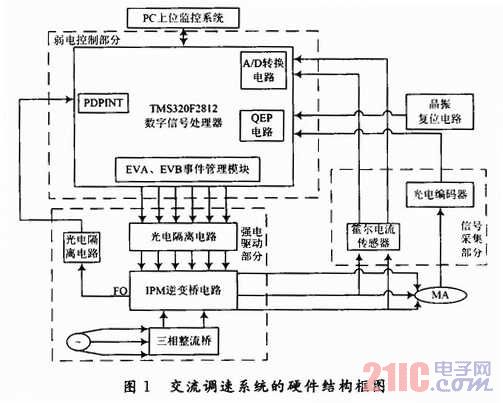
系統(tǒng)由弱電控制、強(qiáng)電驅(qū)動(dòng)以及信號(hào)采集3部分組成。弱電控制部分是系統(tǒng)的控制核心,其完成對(duì)電機(jī)的控制、信號(hào)量的設(shè)定。強(qiáng)電驅(qū)動(dòng)部分是由逆變電路、三相整流橋和三相交流電源組成,其將不可控的三相交流電轉(zhuǎn)化為頻率可控的三相交流電來(lái)驅(qū)動(dòng)電機(jī)。信號(hào)采集部分則由電流、測(cè)速傳感器組成,負(fù)責(zé)對(duì)電機(jī)進(jìn)行電流和轉(zhuǎn)速的檢測(cè),為系統(tǒng)提供反饋信號(hào)。以上3部分有機(jī)的組合在一起就構(gòu)成了一個(gè)高精度交流電機(jī)調(diào)速系統(tǒng)。
2 主要硬件芯片的選型及相關(guān)電路設(shè)計(jì)
2.1 DSP芯片的選型
主處理器選擇了TI(美國(guó)德州儀器)公司的TMS320F2812芯片,F(xiàn)2812是TI公司的一款用于控制的高性能、多功能、高性價(jià)比的32位定點(diǎn)DSP芯片,最高可在150 MHz主頻下工作。F2812片內(nèi)集成眾多資源:存儲(chǔ)資源FLASH、RAM;標(biāo)準(zhǔn)通信接口,如串行通信接口(SCI)、串行外設(shè)接口(SPI)、增強(qiáng)型eCAN總線接口,方便與外設(shè)之間進(jìn)行通信。在F2812內(nèi)部還集成了一個(gè)12位的ADC轉(zhuǎn)換模塊,最高采樣速率達(dá)12.5 MS/s;F2 812片上還包括事件管理器(EV)、定時(shí)器、看門狗以及大量的用戶可開(kāi)發(fā)利用的GPIO口等資源。該芯片具有很高的性價(jià)比,廣泛應(yīng)用于工業(yè)控制,特別是應(yīng)用于處理速度、處理精度方面要求比較高的領(lǐng)域,十分適合于本文的高精度電機(jī)控制系統(tǒng)。
2.2 逆變電路
逆變電路將整流后的直流電變成可控的交流電,考慮系統(tǒng)的安全性和穩(wěn)定性要求,此部分采用模塊化的設(shè)計(jì)思想,即選擇智能功率模塊IPM作為功率器件。
IPM是一種先進(jìn)的功率開(kāi)關(guān)器件,具有高電流密度、低飽和電壓、耐高壓、高輸入阻抗、高開(kāi)關(guān)頻率和低驅(qū)動(dòng)功率等優(yōu)點(diǎn)。IPM內(nèi)部集成了邏輯、控制、檢測(cè)和保護(hù)電路,不僅減小了系統(tǒng)的體積以及開(kāi)發(fā)時(shí)間,也增強(qiáng)了系統(tǒng)的可靠性。
系統(tǒng)采用了日本三菱電機(jī)的PS-21246系列的IPM智能功率模塊。當(dāng)IPM發(fā)生故障時(shí),F(xiàn)O引腳輸出低電平,產(chǎn)生PDPINT功率保護(hù)中斷,實(shí)現(xiàn)保護(hù)。
2.3 高速隔離電路
為實(shí)現(xiàn)低壓數(shù)字電路和高壓功率電路之間的電氣隔離,通常采用光耦隔離,另外,由于SVPWM算法輸出信號(hào)頻率較高,需要反應(yīng)速度較快的光耦,普通的P521光耦無(wú)法滿足速度要求,故設(shè)計(jì)中采用的是一款專用的IPM驅(qū)動(dòng)芯片HCPL-4504。
HCPL-4504是美國(guó)安捷倫公司專為IPM等功率器件設(shè)計(jì)的高速光電隔離接口芯片,瞬間共模比為15 kV/μs,內(nèi)部集成高靈敏度光傳感器,可以準(zhǔn)確、快速反應(yīng)信號(hào)變化狀況,極短的寄生延時(shí)合適于IPM,是功率器件接口的完美解決方案。
2.4 電平轉(zhuǎn)換驅(qū)動(dòng)電路
由于HCPL-4504需要的的驅(qū)動(dòng)電流為16 mA,而DSP為3.3 V TTL電平標(biāo)準(zhǔn),其輸出的電流只有nA數(shù)量級(jí),因而無(wú)法直接驅(qū)動(dòng)。因此,系統(tǒng)需要增設(shè)電平轉(zhuǎn)換驅(qū)動(dòng)電路,如圖2所示。
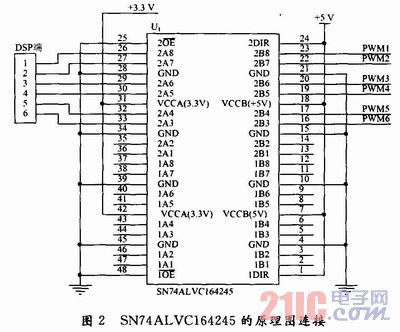
選用的芯片SN74ALVC164245是TI公司推出的一款3態(tài)輸出電平轉(zhuǎn)換芯片,提供2×8道的3.3 V轉(zhuǎn)5 V(反之亦可)的電平轉(zhuǎn)換接口,最大可輸出24 mA電流,其中A端為5 V電平,B端為3.3 V電平。
2.5 霍爾電流傳感器
霍爾電流傳感器是利用霍爾效應(yīng)來(lái)測(cè)量電流的,不僅能測(cè)直流電流,也能測(cè)交流電流,測(cè)量精度和量程比電流互感器高,受溫度影響很小,且不會(huì)產(chǎn)生電流過(guò)載。霍爾電流傳感器的功耗極低,這是其他互感器無(wú)法達(dá)到的。系統(tǒng)采用QBC-SY/SYW系列閉環(huán)霍爾電流傳感器,該系列電流傳感器的初、次級(jí)之間是絕緣的,具有超強(qiáng)抗干擾能力,用于測(cè)量直流、交流和脈動(dòng)電流。交流互感器連接圖如圖3所示。

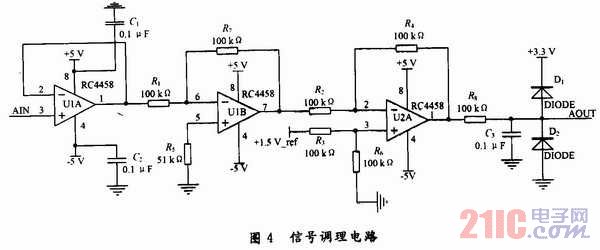
該款傳感器集成了調(diào)理電路,在最大可測(cè)量輸入電流3 A條件下,輸出電壓4 V。由于驅(qū)動(dòng)電機(jī)的額定輸入電流為1.12 A,所以其最大輸出電壓可達(dá),但這并不符合TMS320F2812的輸入要求,故還需要另加上一組信號(hào)調(diào)理電路,將輸出電壓從±1.5 V調(diào)理到0~3 V,才能符合DSP內(nèi)部3.3 V A/D參考電壓的要求。
信號(hào)調(diào)理電路需使用RC 4558和TLV431兩種芯片,其中RC 4558為雙路高性能運(yùn)放;TLV431為低壓可調(diào)精密分流穩(wěn)壓器,用作輸出一個(gè)1.5 V的恒定電壓供給信號(hào)調(diào)理電路使用。信號(hào)調(diào)理電路工作原理為:當(dāng)電壓信號(hào)輸入時(shí),先利用放大器作一級(jí)跟隨處理,然后進(jìn)行反相,最后進(jìn)行加法運(yùn)算。具體電路圖如圖4所示。
2.6 旋轉(zhuǎn)編碼器
為了實(shí)現(xiàn)矢量控制,就必須對(duì)電動(dòng)機(jī)的實(shí)際轉(zhuǎn)速進(jìn)行測(cè)量,因?yàn)門MS32F2812本身的事件管理器中有正交編碼脈沖電路,用于連接光電編碼脈沖以獲得旋轉(zhuǎn)機(jī)械的位置和速率,方案中轉(zhuǎn)速測(cè)量就采用旋轉(zhuǎn)編碼器。
系統(tǒng)綜合考慮后選擇了ELTRA公司的EL40A1024Z5增量式編碼器作為系統(tǒng)得測(cè)速單元。其分辨率達(dá)到了1 024脈沖/轉(zhuǎn),帶有零脈沖,輸出電平為NPN集電極開(kāi)路輸出,可直接連接DSP,測(cè)量轉(zhuǎn)速最高可達(dá)6 000轉(zhuǎn)。
TMS320F2812有兩個(gè)事件管理器(EVA、EVB),每個(gè)事件管理器(EV)模塊都有一個(gè)正交編碼器脈沖(QEP)電路,它們可以直接與編碼器相連,用來(lái)檢測(cè)轉(zhuǎn)速。如果電路被使能,那么可以對(duì)從CAP1/QEP1和CAP2/QEP2(EVA)或CAP4/QEP3和CAP5/QEP4(EVB)引腳上輸入的正交編碼脈沖進(jìn)行解碼和計(jì)數(shù)。當(dāng)QEP電路被使能,CAP1/CAP2和CAP4/CAP5引腳上的捕獲功能將被禁止。
3 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)軟件采用模塊化設(shè)計(jì),可以分為2個(gè)部分;主程序和中斷服務(wù)子程序。
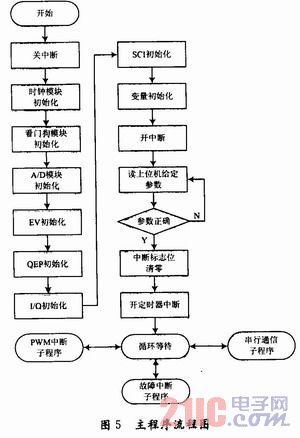
主程序中對(duì)硬件和變量進(jìn)行初始化,對(duì)各個(gè)控制寄存器置初值,對(duì)運(yùn)算過(guò)程中使用的各種變量分配地址并設(shè)置相應(yīng)的初值。初始化模塊僅在DSP上電復(fù)位后被執(zhí)行一次,然后進(jìn)入循環(huán)等待時(shí)期,如圖5所示。
中斷服務(wù)子程序是系統(tǒng)的核心部分,包括PWM中斷服務(wù)子程序,故障保護(hù)中斷服務(wù)子程序,串行中斷服務(wù)子程序。其中PWM中斷服務(wù)子程序負(fù)責(zé)對(duì)電流A/D轉(zhuǎn)換、速度計(jì)算、矢量變換、SVPWM輸出等。故障保護(hù)中斷服務(wù)子程序在系統(tǒng)出現(xiàn)故障時(shí),將會(huì)立即禁止PWM輸出。串行中斷服務(wù)子程序則負(fù)責(zé)DSP與PC上位機(jī)之間的通信,如圖6所示。

初始化之后,系統(tǒng)的運(yùn)行交由中斷服務(wù)子程序控制。PWM中斷服務(wù)子程序負(fù)責(zé)兩相定子電流的采樣,轉(zhuǎn)速的計(jì)算,矢量變換以及SVPWM調(diào)制,是系統(tǒng)實(shí)現(xiàn)矢量控制的核心部分。系統(tǒng)采用模塊化編程,把PWM中斷服務(wù)子程序分為電流采樣模塊,電機(jī)轉(zhuǎn)速計(jì)算模塊,矢量控制坐標(biāo)變換模塊,模糊PI調(diào)節(jié)模塊,SVPWM調(diào)制模塊。
4 結(jié)語(yǔ)
針對(duì)交流調(diào)速的特點(diǎn),設(shè)計(jì)了一套基于DSP的交流異步電機(jī)高精度調(diào)速系統(tǒng)。該系統(tǒng)應(yīng)用矢量控制技術(shù)作為系統(tǒng)的總體控制方案,以TI公司電機(jī)控制專用的高速DSP TMS320F2812為系統(tǒng)的核心處理器,三菱電機(jī)公司的PS21246智能功率模塊(IPM)為逆變器件,在此基礎(chǔ)上運(yùn)用空間電壓矢量脈寬調(diào)制(space vector pulse width modulation,SVPWM)技術(shù)和PI控制算法,構(gòu)建了一個(gè)基于TMS320F2812 DSP的交流異步電機(jī)高精度控制平臺(tái)。實(shí)驗(yàn)表明,系統(tǒng)基本滿足高精度調(diào)速要求,十分適合于伺服控制系統(tǒng)。