
摘 要:為了在電機進行型式試驗時,對機組各種運行工況和運行狀態(tài)進行自動的轉(zhuǎn)換和控制,我們將西門子6RA70全數(shù)字調(diào)速裝置應(yīng)用于試驗站雙機組拖動控制系統(tǒng)中,以滿足電機試驗測試的要求。經(jīng)實際應(yīng)用表明,與以前人工單機控制相比,提高了整個機組控制系統(tǒng)的自動化程度和工作效率,效果良好。
關(guān)鍵詞:調(diào)速;電機試驗; 控制系統(tǒng)
1 引言
在電機的生產(chǎn)制造業(yè)中,電機產(chǎn)品的出廠試驗與性能測試是非常重要的一個環(huán)節(jié)。在電機型式試驗過程中,各機組的運行與控制較為復(fù)雜,若采用人工單機控制,很難滿足試驗測試的要求。本文介紹的雙機組拖動控制系統(tǒng)是某中型電機試驗站計算機自動測試系統(tǒng)的一部分,為了在電機進行型式試驗時對機組各種運行工況和運行狀態(tài)進行自動的轉(zhuǎn)換和控制,我們將西門子6RA70全數(shù)字調(diào)速裝置應(yīng)用于試驗站雙機組拖動控制系統(tǒng)中,并采用觸摸屏與PLC組成上位機監(jiān)視管理系統(tǒng),可方便的實現(xiàn)對機組各種運行工況和運行狀態(tài)進行自動的轉(zhuǎn)換和控制。
2 機組自動控制系統(tǒng)的構(gòu)成與原理
2.1 系統(tǒng)的總體結(jié)構(gòu)
機組拖動控制系統(tǒng)主要包括一個西門子全數(shù)字雙機組拖動閉環(huán)調(diào)速系統(tǒng)和5個單片機控制的勵磁電源實時控制系統(tǒng)。試驗有4種不同的項目,不同的項目下各電機的運行情況不同,反饋信號也有所不同。機組運行控制原理如圖(1)所示。由于機組的控制較復(fù)雜,并且在試驗過程中還要進行多種工況的調(diào)整與變換,因此我們在對機組控制系統(tǒng)設(shè)計時,引入了集散控制的概念,整個拖動控制系統(tǒng)由觸摸屏、PLC、及各勵磁控制柜和調(diào)速系統(tǒng)構(gòu)成,上位機將試驗站的5套直流電源和一套雙機組調(diào)速系統(tǒng)統(tǒng)一管理起來,通過PLC的模擬量模塊對下位機輸出控制的給定信號(遠程控制時),也可根據(jù)需要由下位機對各電源子系統(tǒng)進行單機控制(當(dāng)?shù)乜刂茣r)。子系統(tǒng)的各運行參數(shù)可通過檢測接口送回,并在觸摸屏上顯示。由此構(gòu)成的集散型控制系統(tǒng)操作方便,安全可靠,提高了使整個測試系統(tǒng)的自動化程度和工作效率。控制系統(tǒng)結(jié)構(gòu)框圖如圖(2)所示。
2.2雙機組拖動控制系統(tǒng)組成原理
在試驗中直流電機1ZF和2ZF由西門子全數(shù)字直流調(diào)速系統(tǒng)(6RA70)拖動控制,根據(jù)不同的試驗項目,調(diào)速系統(tǒng)可選擇兩種不同的工作方式:一是穩(wěn)壓方式,其輸出供給兩臺電機的電樞電壓,即雙機拖動;二是調(diào)速方式,要求對1ZF的轉(zhuǎn)速進行穩(wěn)定控制,即轉(zhuǎn)速負反饋單機拖動控制。雖然兩種工作方式下控制系統(tǒng)對象的結(jié)構(gòu)的參數(shù)發(fā)生了變化,但可按不同的運行方式整定相應(yīng)的控制參數(shù),工作方式的選擇只需要通過上位機給出變址參數(shù)即可實現(xiàn)。
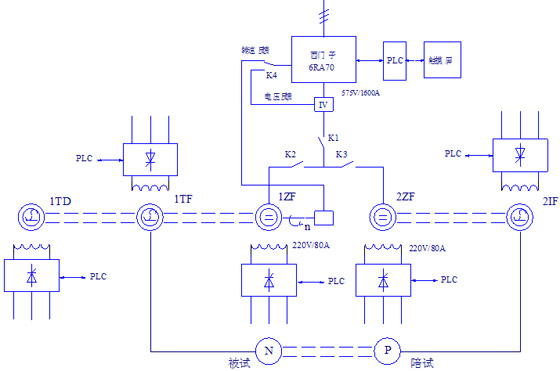
圖1 機組拖動控制原理
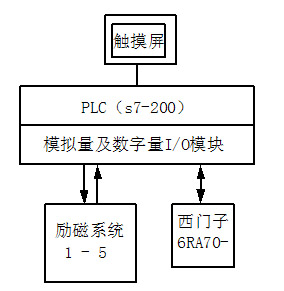
圖2 控制系統(tǒng)結(jié)構(gòu)框圖
3 雙機拖動控制系統(tǒng)參數(shù)設(shè)置與調(diào)試
西門子全數(shù)字直流調(diào)速系統(tǒng)功能強大,包括有控制單元,參數(shù)設(shè)定單元,功率單元,檢測元件等及其他輔助部件。其自診斷能力強,安全保護措施全面,且現(xiàn)場調(diào)試與參數(shù)整定很方便。
3.1 變址選擇與參數(shù)設(shè)置
為適應(yīng)不同控制對象和運行工況的需要,可通過開關(guān)量(bit17、bit16)狀態(tài)的設(shè)置選擇4個不同變址號(1~4),并對應(yīng)著一組不同的參數(shù),包括對象的固有參數(shù)、調(diào)節(jié)器的控制參數(shù)以及控制量的指標(biāo)參數(shù)等等。由于試驗要求不同,雙機組控制系統(tǒng)有兩種運行方式,我們通過X171的端子39進行切換。當(dāng)端子39為“0”(0V),則bit17bit16=00B,變址為1,選擇第一組參數(shù),系統(tǒng)工作于雙機組拖動調(diào)壓方式;當(dāng)端子39為“1” (24V),則bit17bit16=01B,變址為2,既選擇第二組參數(shù),系統(tǒng)工作于單機拖動調(diào)速方式。顯然這兩種運行方式下控制對象的結(jié)構(gòu)、參數(shù)都發(fā)生了變化,為了使系統(tǒng)達到良好的控制性能,控制參數(shù)也應(yīng)與相應(yīng)改變。
3.1現(xiàn)場調(diào)試與參數(shù)整定
在現(xiàn)場調(diào)試時,將6RA70全數(shù)字調(diào)速裝置自帶的簡易操作控制面板通過串行接口與PC機連接,并將授權(quán)鍵參數(shù)P051設(shè)為40,則調(diào)節(jié)器的PID參數(shù)和其他的控制指標(biāo)參數(shù)可直觀方便的進行在線修改和調(diào)試。但對象的固有參數(shù)(如繞組的電阻,電感等)不可在線修改。
控制系統(tǒng)調(diào)節(jié)器的參數(shù)整定有兩種方法:一種是按“自動優(yōu)化運行”模式,系統(tǒng)通過各種測試,對各調(diào)節(jié)器控制參數(shù)進行整定和優(yōu)化。另一種是按“手動優(yōu)化” 模式,在這種方式下首先應(yīng)將對象的參數(shù)設(shè)置好,如電樞回路電阻由參數(shù)P110設(shè)置,電感由參數(shù)P111設(shè)置。各調(diào)節(jié)器的參數(shù)整定可根據(jù)運行情況在線逐步優(yōu)化,直到各性能指標(biāo)達到要求為止。
若要監(jiān)視系統(tǒng)中各檢測量的變化和運行狀態(tài),可通過設(shè)置連接器號在對應(yīng)的顯示窗口顯示。模擬量連接器號由參數(shù)P044選擇,并在參數(shù)號r043的窗口顯示,可同時選擇、顯示7個模擬量。開關(guān)量連接器號由參數(shù)P046選擇,并在參數(shù)號r045的窗口顯示,可同時選擇、顯示4個開關(guān)量。這些顯示窗口給現(xiàn)場調(diào)試帶來很大的方便,提高了工作效率。
4 系統(tǒng)的應(yīng)用
雙機組拖動控制系統(tǒng)已研制完成,并在某廠的中型電機試驗站中投入使用。其中觸摸屏與計算機數(shù)據(jù)測試系統(tǒng)安裝在主控室,PLC及顯示儀表安裝于現(xiàn)場控制室中。如圖3為觸摸屏試驗項目選擇界面之一。當(dāng)控制系統(tǒng)工作于遠程控制模式時,可由上位機給出變址號選擇指令(0、1),以選則雙機組拖動控制系統(tǒng)工況; 當(dāng)控制系統(tǒng)工作于當(dāng)?shù)乜刂颇J綍r,由人工操作給出變址號選擇指令。這種當(dāng)?shù)乜刂品绞讲坏珵橄到y(tǒng)的調(diào)試和控制參數(shù)的整定帶來方便,并且不會因為某一臺設(shè)備出現(xiàn)故障而影響整個系統(tǒng)的工作與運行。
經(jīng)過實際應(yīng)用,該雙機組拖動控制系統(tǒng)各性能指標(biāo)達到了設(shè)計要求。在雙機組拖動調(diào)壓方式時,兩臺電機起動平穩(wěn),當(dāng)負載發(fā)生突變時電壓超調(diào)量小于3%。在單機組拖動調(diào)速方式時,當(dāng)負載發(fā)生突變時轉(zhuǎn)速超調(diào)量小于1%。
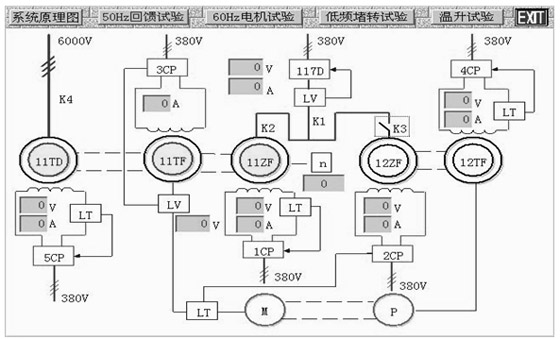
圖3 試驗項目選擇界面
5 結(jié)束語
經(jīng)過現(xiàn)場調(diào)試與實踐應(yīng)用,雙機組拖動控制系統(tǒng)運行性能良好,方便可靠。與以前人工單機控制相比,改自動控制系統(tǒng)的運用,減輕了實驗站工作人員的勞動強度,提高了工作效率。將其與計算機數(shù)據(jù)采集系統(tǒng)結(jié)合起來應(yīng)用與電機的型試試驗中,使測試數(shù)據(jù)更加客觀準(zhǔn)確,為進一步提高產(chǎn)品質(zhì)量提供有利的條件,受到用戶的好評。
參考文獻
[1] SIMATIC S7-200可編程序控制器產(chǎn)品手冊
[2] SIMOREGK 6RA23/24 系列全數(shù)字直流調(diào)速系統(tǒng)使用手冊
[3] 賴壽宏. 計算機控制技術(shù)[M].北京:機械工業(yè)出版社,2000.5