
引言
由于線性放大驅(qū)動方式" title="驅(qū)動方式">驅(qū)動方式效率和散熱問題嚴重,目前絕大多數(shù)直流電動機采用開關(guān)驅(qū)動方式。開關(guān)驅(qū)動方式是半導(dǎo)體功率器件工作在開關(guān)狀態(tài),通過脈寬調(diào)制PWM控制電動機電樞電壓,實現(xiàn)調(diào)速。目前已有許多文獻介紹直流電機調(diào)速,宋衛(wèi)國等用89C51單片機實現(xiàn)了直流電機閉環(huán)調(diào)速;張立勛等用AVR單片機實現(xiàn)了直流電機PWM調(diào)速;郭崇軍等用C8051實現(xiàn)了無刷直流電機控制;張紅娟等用PIC單片機實現(xiàn)了直流電機PWM調(diào)速;王晨陽等用DSP實現(xiàn)了無刷直流電機控制。上述文獻對實現(xiàn)調(diào)速的硬件電路和軟件流程的設(shè)計有較詳細的描述,但沒有說明具體的調(diào)壓調(diào)速方法,也沒有提及占空比與電機端電壓平均值之間的關(guān)系。在李維軍等基于單片機用軟件實現(xiàn)直流電機PWM調(diào)速系統(tǒng)中提到平均速度與占空比并不是嚴格的線性關(guān)系,在一般的應(yīng)用中,可以將其近似地看作線性關(guān)系。但沒有做深入的研究。本文通過實驗驗證,在不帶電機情況下,PWM波占空比與控制輸出端電壓平均值之間呈線性關(guān)系;在帶電機情況下,占空比與電機端電壓平均值滿足拋物線方程,能取得精確的控制。本文的電機閉環(huán)調(diào)速是運用Matlab擬合的關(guān)系式通過PID控制算法實現(xiàn)。
1 系統(tǒng)硬件設(shè)計
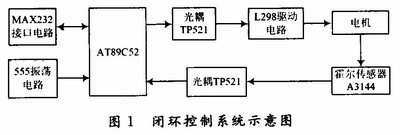
本系統(tǒng)是基于TX-1C實驗板上的AT89C52單片機,調(diào)速系統(tǒng)的硬件原理圖如圖1所示,主要由AT89C52單片機、555振蕩電路、L298驅(qū)動電路、光電隔離、霍爾元件測速電路、MAX 232電平轉(zhuǎn)換電路等組成。
2 系統(tǒng)軟件設(shè)計
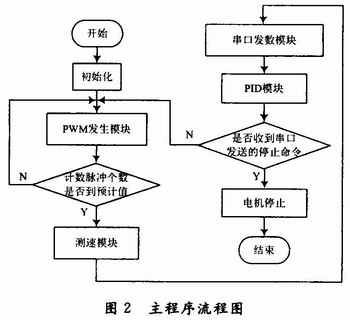
系統(tǒng)采用模塊化設(shè)計,軟件由1個主程序,3個中斷子程序,即外部中斷0、外部中斷1,定時器0子程序,PID算法子程序,測速子程序及發(fā)送數(shù)據(jù)到串口顯示子程序組成,主程序流程圖如圖2所示。外部中斷0通過比較直流電平與鋸齒波信號產(chǎn)生PWM波,外部中斷1用于對傳感器的脈沖計數(shù)。定時器0用于對計數(shù)脈沖定時。測得的轉(zhuǎn)速通過串口發(fā)送到上位機顯示,通過PID模塊調(diào)整轉(zhuǎn)速到設(shè)定值。本實驗采用M/T法測
速,它是同時測量檢測時間和在此檢測時間內(nèi)霍爾傳感器" title="霍爾傳感器">霍爾傳感器所產(chǎn)生的轉(zhuǎn)速脈沖信號的個數(shù)來確定轉(zhuǎn)速。由外部中斷1對霍爾傳感器脈沖計數(shù),同時起動定時器0,當(dāng)計數(shù)個數(shù)到預(yù)定值2 000后,關(guān)定時器0,可得到計2 000個脈沖的計數(shù)時間,由式計算出轉(zhuǎn)速:
n=60f/K=60N/(KT) (1)
式中:n為直流電機的轉(zhuǎn)速;K為霍爾傳感器轉(zhuǎn)盤上磁鋼數(shù);f為脈沖頻率;N為脈沖個數(shù);T為采樣周期。
3 實驗結(jié)果及原因分析
3.1 端電壓平均值與轉(zhuǎn)速關(guān)系
3.1.1 實驗結(jié)果
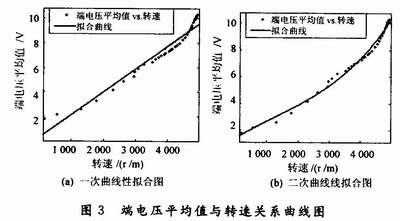
實驗用的是永磁穩(wěn)速直流電機,型號是EG-530YD-2BH,額定轉(zhuǎn)速2 000~4 000 r/min,額定電壓12 V。電機在空載的情況下,測得的數(shù)據(jù)用Matlab做一次線性擬合,擬合的端電壓平均值與轉(zhuǎn)速關(guān)系曲線如圖3(a)所示。相關(guān)系數(shù)R-square:0.952 1。擬合曲線方程為:
y=0.001 852x+0.296 3 (2)
由式(2)可知,端電壓平均值與轉(zhuǎn)速可近似為線性關(guān)系,根椐此關(guān)系式,在已測得的轉(zhuǎn)速的情況下可以計算出當(dāng)前電壓。為了比較分析,同樣用Matlab做二次線性擬合,擬合的端電壓平均值與轉(zhuǎn)速關(guān)系曲線如圖3(b)所示。相關(guān)系數(shù)R-square:0.986 7。
3.1.2 原因分析
比較圖3(a)可知,當(dāng)轉(zhuǎn)速在0~1 500 r/min和4 000~5 000 r/min,端電壓平均值與轉(zhuǎn)速間存在的非線性,用二次曲擬合如圖3(b)所示,擬合相關(guān)系數(shù)較高。由圖3(a)可見,當(dāng)電機轉(zhuǎn)速為0時電機兩端電壓平均值約為1.3 V。這是因為電機處于靜止?fàn)顟B(tài)時,摩擦力為靜摩擦力,靜摩擦力是非線性的。隨著外力的增加而增加,最大值發(fā)生在運動前的瞬間。電磁轉(zhuǎn)矩為負載制動轉(zhuǎn)矩和空載制動轉(zhuǎn)矩之和,由于本系統(tǒng)不帶負載,因此電磁轉(zhuǎn)矩為空載制動轉(zhuǎn)矩。空載制動轉(zhuǎn)矩與轉(zhuǎn)速之間此時是非線性的。電磁轉(zhuǎn)矩與電流成正比,電流又與電壓成正比,因
此此時電壓與轉(zhuǎn)速之間是非線性的。
當(dāng)轉(zhuǎn)速在2 000~4 000 r/min線性關(guān)系較好,占空比的微小改變帶來的轉(zhuǎn)速改變較大,因此具有較好的調(diào)速性能。這是因為隨著運動速度的增加,摩擦力成線性的增加,此時的摩擦力為粘性摩擦力。粘性摩擦是線性的,與速度成正比,空載制動轉(zhuǎn)矩與速度成正比,也即電磁轉(zhuǎn)矩與電流成正比,電流又與電壓成正比,因此此時電壓與轉(zhuǎn)速之間是線性的。當(dāng)轉(zhuǎn)速大于4 000 r/min。由于超出了額定轉(zhuǎn)速所以線性度較差且調(diào)速性能較差。此時用二次曲線擬合結(jié)果較好,因為當(dāng)電機高速旋轉(zhuǎn)時,摩擦阻力" title="摩擦阻力">摩擦阻力小到可以忽略,此時主要受電機風(fēng)阻型負荷的影響,當(dāng)運動部件在氣體或液體中運動時,其受到的摩擦阻力或摩擦阻力矩被稱為風(fēng)機型負荷。對同一物體,風(fēng)阻系數(shù)一般為固定值。阻力大小與速度的平方成正比。即空載制動轉(zhuǎn)矩與速度的平方成正比,也即電磁轉(zhuǎn)矩與速度的平方成正比,電磁轉(zhuǎn)矩與電流成正比,電流又與電壓成正比,因此此時電壓與轉(zhuǎn)速之間是非線性的。
3.2 占空比與端電壓平均值關(guān)系
3.2.1 實驗結(jié)果
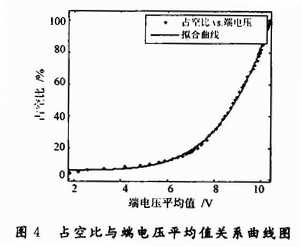
擬合占空比與端電壓平均值關(guān)系曲線如圖4所示。相關(guān)系數(shù)R-square:0.998 4。擬合曲線方程為:
![]()
如圖4所示,占空比與端電壓平均值滿足拋物線方程。運用積分分離的PID算法改變電機端電壓平均值,可以運用此關(guān)系式改變占空比,從而實現(xiàn)了PWM調(diào)速。
用示波器分別測出電壓的頂端值Utop與底端值Ubase,端電壓平均值Uarg滿足關(guān)系式:
![]()
其中:α為占空比。
正是由于所測得的電機端電壓底端值Ubase不為0,所以得出的占空比與端電壓平均值之間關(guān)系曲線為拋物線。若將電機取下,直接測L298的out1與out2輸出電壓。所測得的電機端電壓底端值Ubase約為0,所得的占空比與端電壓平均值滿足線性關(guān)系,即令式(4)中Ubase為0,式(4)變?yōu)椋?br />
![]()
3.2.2 原因分析
將電機取下后,直接測L298的輸出端之間的電壓,占空比與端電壓平均值滿足關(guān)系式(5),說明整個硬件電路的設(shè)計以及軟件編程的正確性。從電機反電勢角度分析,當(dāng)直流電機旋轉(zhuǎn)時,電樞導(dǎo)體切割氣隙磁場,在電樞繞組中產(chǎn)生感應(yīng)電動勢。由于感應(yīng)電動勢方向與電流的方向相反,感應(yīng)電動勢也即反電勢。直流電機的等效模型如圖5所示。圖5(a)表示電機工作在電動機狀態(tài)。圖5(b)表示電機工作在發(fā)電機狀態(tài)。
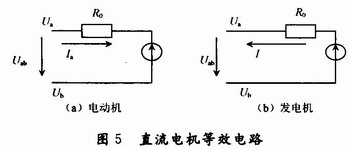
如圖5(a)所示,電壓平衡方程為:
![]()
式中:U為外加電壓;Ia為電樞電流;Ra為電樞繞組電阻;2△Ub為一對電刷接觸壓降,一般取2△Ub為0.5~2 V;Ea為電樞繞組內(nèi)的感應(yīng)電動勢。電機空載時,電樞電流可忽略不計,即電流Ia為0。空載時的磁場由主磁極的勵磁磁動勢單獨作用產(chǎn)生。給電機外加12 V的額定電壓,由(6)可得反電勢:
![]()
以40%的占空比為例,電機端電壓Uab是測量中的電壓平均值Uarg,其值為8.34 V,測量中的電壓底端值Ubase約為7 V。由式(7)可得Ea的值范圍應(yīng)在6.34~7.84 V。由圖5(b)可見,此時Uab的值是測得的底端值Ubase即電機的電動勢Ea為7 V。
當(dāng)PWM工作在低電平狀態(tài),直流電機不會立刻停止,會繼續(xù)旋轉(zhuǎn),電樞繞組切割氣隙磁場,電機此時工作在發(fā)電機狀態(tài),產(chǎn)生感應(yīng)電動勢E。
![]()
式中:Ce為電機電動勢常數(shù);φ為每級磁通量。由于電機空載,所以圖5(b)中無法形成回路。用單片機仿真軟件Proteus可直觀的看出在PWM為低電平狀態(tài),電機處于減速狀態(tài)。低電平持續(xù)時間越長,電機減速量越大。正是由于在低電平期間,電機處于減速狀態(tài),由式(8)可知,Ce,φ均為不變量,轉(zhuǎn)速n的變化引起E的改變。此時Uab的值等于E的值。電機在低電平期間不斷的減速,由于PWM周期較短,本文中取
20 ms,電機在低電平期間轉(zhuǎn)速還未減至0,PWM又變?yōu)楦唠娖搅恕_@樣,就使測得的Ubase值不為0。以40%的占空比為例,當(dāng)PWM工作在低電平狀態(tài),測得Ubase的值約為7 V。由式(8)可知,當(dāng)正占空比越大,轉(zhuǎn)速也就越大,同時減速時間越短,感應(yīng)電勢E的值越大。所以Ubase的值也就越大。
4 結(jié)語
重點分析了直流電機PWM調(diào)速過程中控制電壓的非線性,對非線性的影響因素做了詳細的分析。由于PWM在低電平期間電壓的底端值不為0,導(dǎo)致了占空比與電機端電壓平均值之間呈拋物線關(guān)系。因此,可用得出的拋物線關(guān)系式實現(xiàn)精確調(diào)速。本系統(tǒng)的非線性研究可為電機控制中非線性的進一步研究提供依據(jù),在實際運用中,可用于移動機器人、飛行模擬機的精確控制。