
摘要:論述了視頻檢測(cè)在智能交通領(lǐng)域的應(yīng)用,分析了目前交通信號(hào)機(jī)系統(tǒng)存在的不足。提出了以TMS320F2812為核心的視頻圖像運(yùn)動(dòng)目標(biāo)檢測(cè)方案,并進(jìn)行了方案的同步信號(hào)分離電路、系統(tǒng)總體結(jié)構(gòu)設(shè)計(jì),以及信號(hào)采樣和數(shù)據(jù)處理的軟件設(shè)計(jì)。實(shí)驗(yàn)表明該解決方案設(shè)計(jì)達(dá)到了預(yù)期目標(biāo),具有較高的準(zhǔn)確性。
關(guān)鍵詞:交通控制;視頻檢測(cè);運(yùn)動(dòng)目標(biāo)檢測(cè);DSP;TMS320F2812
視頻圖像檢測(cè)與處理技術(shù)在智能交通(ITS)領(lǐng)域中的應(yīng)用研究已引起了國(guó)內(nèi)外學(xué)者廣泛關(guān)注,已形成許多研究熱點(diǎn)。目前交通領(lǐng)域視頻檢測(cè)技術(shù)主要用于車速、車型、車流量檢測(cè),車牌檢測(cè),智能泊車系統(tǒng)、安全監(jiān)控等方面,有成熟的視頻檢測(cè)產(chǎn)品。但在路口交通方案解決、提高路口交通效率方面應(yīng)用較少。
目前城市交通路口應(yīng)用較多的是感應(yīng)線圈檢測(cè)方式,但其安裝、維修不便,對(duì)道路有破壞,成本高昂。其他可應(yīng)用的檢測(cè)方式,諸如超聲波檢測(cè)準(zhǔn)確性不高,易受干擾;微波檢測(cè)產(chǎn)品的成本較高。
本文設(shè)計(jì)了基于TMS320F2812的路口車輛狀態(tài)視頻檢測(cè)系統(tǒng),實(shí)時(shí)檢測(cè)路口車輛狀態(tài),并將結(jié)果反饋回路口信號(hào)控制機(jī),便于信號(hào)機(jī)優(yōu)化路口信號(hào)燈的運(yùn)行方案。
1 基于視頻檢測(cè)的解決方案
1.1 方案的提出
目前大多數(shù)城市所使用的交通控制機(jī)系統(tǒng),路口的紅綠燈運(yùn)行方案基本是固定的。這樣就會(huì)出現(xiàn)一種情況,即在某時(shí)刻某方向無(wú)車,該方向依然是綠燈。若無(wú)車的情況可以及時(shí)檢測(cè)并反饋到控制機(jī),則可以提高交通效率,對(duì)此提出了基于TMS320F2812的交通路口車輛狀態(tài)視頻檢測(cè)系統(tǒng)。
1.2 系統(tǒng)工作原理
系統(tǒng)工作原理圖如圖1所示,圖中監(jiān)控?cái)z像機(jī)安裝于路口斑馬線之前約70 m處(視路口車流量而定,繁忙路口則遠(yuǎn);反之則近),視頻信號(hào)由DSP本身自帶的A/D模塊進(jìn)行采樣和處理,依據(jù)處理結(jié)果輸出一個(gè)高低電平信號(hào),此信號(hào)由路口的控制機(jī)在對(duì)應(yīng)路口通行方向?yàn)榫G燈時(shí)進(jìn)行查詢并記錄。記錄一段時(shí)間(數(shù)周或數(shù)月)之后,便可以依據(jù)記錄結(jié)果統(tǒng)計(jì)優(yōu)化信號(hào)燈運(yùn)行方案。由于圖像檢測(cè)的數(shù)據(jù)處理量較大,實(shí)時(shí)性要求高,因此系統(tǒng)設(shè)計(jì)的處理核心采用TMS320F2812DSP數(shù)字信號(hào)處理器。

2 系統(tǒng)硬件設(shè)計(jì)
2.1 復(fù)合視頻信號(hào)
CCD攝像機(jī)輸出完整的視頻信號(hào)是1 Vp-p的復(fù)合模擬信號(hào),包括圖像信號(hào)、同步信號(hào)、消隱信號(hào)、槽脈沖和均衡脈沖信號(hào)。一場(chǎng)圖像時(shí)間為20 ms,其中各脈沖寬度如下:行同步4.7 μs;場(chǎng)同步160μs;均衡脈沖2.35μs.槽脈沖4.7 μs;場(chǎng)消隱脈沖1 612μs;行消隱12μs。因此,需要將場(chǎng)消隱信號(hào)分離出來(lái)作為每一場(chǎng)圖像采集的觸發(fā)信號(hào)。
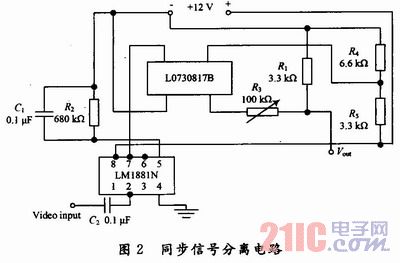
2.2 場(chǎng)同步信號(hào)分離電路
LM1881N是一款視頻同步信號(hào)分離芯片,主要用于NTSC,PAL,SECAM制式,幅度為0.5~2 Vp-p之間的視頻同步信號(hào)分離。LM1881N應(yīng)用電路圖如圖2所示。
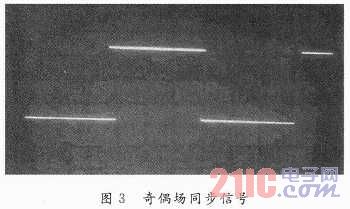
用示波器觀察信號(hào)Vout的波形圖,如圖3所示。
2.3 圖像處理系統(tǒng)
系統(tǒng)設(shè)計(jì)圖像處理核心為TMS320F2812DSP處理器。實(shí)驗(yàn)中將奇偶場(chǎng)同步信號(hào)Vout(圖3中的方波信號(hào))接入TMS320F2812的I/O口,使用查詢中斷的方式觸發(fā)A/D采樣。連接原理圖如圖4所示。

如圖3和圖4所示,TMS320F2812在程序初始化后即查詢I/O口引腳信號(hào),在同步信號(hào)的上升沿A/D模塊開始采樣CCD攝像機(jī)接入的圖像信號(hào)。對(duì)應(yīng)每場(chǎng)圖像采樣時(shí)間不超過(guò)18.4 ms。
3 系統(tǒng)軟件設(shè)計(jì)
3.1 信號(hào)采集方案特點(diǎn)
根據(jù)系統(tǒng)的目的要求,系統(tǒng)只需實(shí)時(shí)檢測(cè)路面是否有車輛經(jīng)過(guò)即可,而無(wú)需檢測(cè)車速、加速度、車流量等。即不需要采集全副圖像數(shù)據(jù)進(jìn)行處理,只需采集足夠多的像素點(diǎn)進(jìn)行處理就可以判斷是否有運(yùn)動(dòng)目標(biāo)的存在。這樣就可以大大降低數(shù)據(jù)處理量和節(jié)約時(shí)間,提高系統(tǒng)檢測(cè)速度。
3.2 運(yùn)動(dòng)目標(biāo)檢測(cè)算法
基于視頻圖像的運(yùn)動(dòng)目標(biāo)檢測(cè)方法有多種分類,目前常用的主要有幀差法、背景減法和基于光流的方法。本文采用背景減法和幀差法相結(jié)合的處理方法。
檢測(cè)方法的步驟:

式中:M×N表示采集圖像大小,數(shù)值表示檢測(cè)區(qū)像素?cái)?shù);k表示的是連續(xù)采集的圖像場(chǎng)數(shù),為得到較好的背景圖像閾值,k值需足夠大;如果M,N,k值足夠大,即M×N×k的值夠大,則求得的統(tǒng)計(jì)閾值Th越合適。
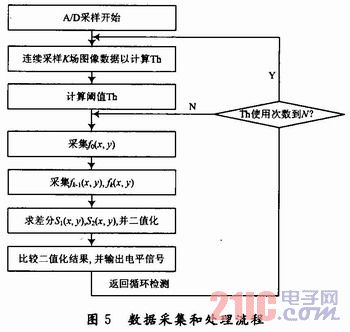
(6)對(duì)S1(x,y),S2(x,y)進(jìn)行統(tǒng)計(jì)和比較,求差值,若差值超過(guò)一定值,則表示有運(yùn)動(dòng)目標(biāo)存在;反之,無(wú)運(yùn)動(dòng)目標(biāo)。數(shù)據(jù)采集和處理流程如圖5所示。
4 實(shí)驗(yàn)和分析
在實(shí)驗(yàn)室條件下進(jìn)行實(shí)驗(yàn),參數(shù)k取200,M×N取570采樣值,即M×N×k值取為114 000;每個(gè)Th更新周期N取300;背景為固定背景,運(yùn)動(dòng)目標(biāo)為行人,光線充足且無(wú)直射和閃爍。實(shí)驗(yàn)結(jié)果記錄如表1所示,S1,S2分別表示S1(x,y),S2(x,y)。
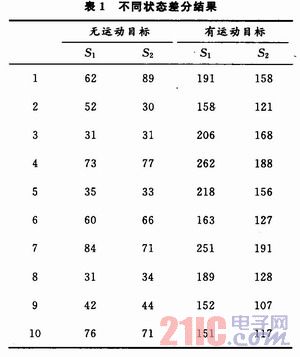
表1進(jìn)行多次實(shí)驗(yàn),統(tǒng)計(jì)實(shí)驗(yàn)結(jié)果表明,在無(wú)運(yùn)動(dòng)目標(biāo)狀態(tài)下,S1(x,y),S2(x,y)值最大不超過(guò)100,且有95.3%分布在90以內(nèi);在有運(yùn)動(dòng)目標(biāo)狀態(tài)下,S1(x,y),S2(x,y)值一般超過(guò)120,且有96.6%超過(guò)110。因此,可以將100和110作為判斷是否存在運(yùn)動(dòng)目標(biāo)的門檻值。
同時(shí),實(shí)驗(yàn)運(yùn)動(dòng)目標(biāo)的大小、速度,M×N取值大小都會(huì)影響檢測(cè)結(jié)果。運(yùn)動(dòng)目標(biāo)越大,M×N取值越大則檢測(cè)結(jié)果越好,但是數(shù)據(jù)處理量增加會(huì)使單次檢測(cè)時(shí)間增加。
5 結(jié)語(yǔ)
本解決方案達(dá)到了預(yù)期目標(biāo),實(shí)現(xiàn)了對(duì)交通路口車輛狀態(tài)的判斷功能,運(yùn)用于交通控制機(jī)可以有效地提高路口通行效率。方案在應(yīng)用中對(duì)現(xiàn)有道路無(wú)破壞性,安裝方便,成本較低。此外,提高系統(tǒng)的數(shù)據(jù)處理能力和可靠性,使用更好的圖像處理方法來(lái)提高檢測(cè)的準(zhǔn)確性和靈敏度也是研究的重點(diǎn)之一。