摘要:介紹一種簡單、便攜、多功能的發(fā)動機轉(zhuǎn)速信號模擬器,采用PWM信號逼近的方法生成幅值隨發(fā)動機轉(zhuǎn)速變化的磁電信號,采用輸出比較的方式輸出霍爾信號。該模擬器可以方便地設(shè)定發(fā)動機參數(shù)和實時在線修改發(fā)動機轉(zhuǎn)速,并能夠?qū)崟r顯示。實驗結(jié)果表明,該模擬器具有信號精度高、發(fā)動機轉(zhuǎn)速范圍大的特點。
關(guān)鍵詞:發(fā)動機;轉(zhuǎn)速模擬;單片機;逼近
引言
隨著發(fā)動機電控系統(tǒng)的結(jié)構(gòu)和控制策略日趨復(fù)雜,電控系統(tǒng)的研發(fā)工作難度以及實驗工作量大大增加,成本也大幅度提高。V型開發(fā)模式已經(jīng)成為發(fā)動機ECU(Electronic Control Unit,電子控制單元)開發(fā)流程的主流,其中的硬件在環(huán)仿真中,為了配合ECU軟件的開發(fā),需要模擬發(fā)動機的轉(zhuǎn)速信號來驗證軟件算法的正確性。
目前已經(jīng)有很多研發(fā)人員已經(jīng)做了這方面的研究。例如,清華大學(xué)的章健勇開發(fā)的發(fā)動機轉(zhuǎn)速模擬器系統(tǒng)利用數(shù)字端口實現(xiàn)了大轉(zhuǎn)速范圍內(nèi)發(fā)動機轉(zhuǎn)速霍爾信號的模擬;北京理工大學(xué)的王宇明設(shè)計的便攜式發(fā)動機工況信號模擬器,能夠比較真實地模擬發(fā)動機傳感器信號的類型、形態(tài),基于模型的信號產(chǎn)生方法能夠較好地反映發(fā)動機工況變化中傳感器的內(nèi)在關(guān)系,并且提出了把霍爾信號通過硬件逐步轉(zhuǎn)化成為磁電信號的方法;北京城建設(shè)計研究總院的趙華偉設(shè)計的轉(zhuǎn)速模擬器采用硬件方式產(chǎn)生頻率方波信號和電流信號的方法,不僅能夠提供發(fā)動機所需的方波信號,而且頻率調(diào)節(jié)精度高,能夠?qū)崿F(xiàn)電流的輸出。
這些模擬器尚不能模擬得到理想的磁電信號,并且對發(fā)動機參數(shù)變化的適應(yīng)性很差。本文提出一種生成標(biāo)準(zhǔn)磁電正弦信號的方法,并在此基礎(chǔ)上設(shè)計了一款便攜、靈活的發(fā)動機轉(zhuǎn)速信號模擬系統(tǒng)。磁電正弦信號可以通過硬件轉(zhuǎn)化和軟件逼近兩種方法得到,實驗證明前者得到的磁電信號精度不高,與真實磁電信號差異較大,所以本文采用軟件逼近的方法。軟件分段逼近分為DA分段逼近和PWM分段逼近。DA分段逼近的方法需要外擴一塊D/A芯片,且轉(zhuǎn)化過程需要占用大量單片機資源,不能滿足高頻的需求,所以本文選用PWM分段逼近的方法。本系統(tǒng)以MC9S08為處理器,通過面板鍵盤或RS232通信方式來設(shè)定發(fā)動機參數(shù)和實時在線修改發(fā)動機轉(zhuǎn)速,并通過LCD實時顯示信息。
1 系統(tǒng)總體方案設(shè)計
發(fā)動機轉(zhuǎn)速模擬器系統(tǒng)原理框圖如圖1所示。整個系統(tǒng)包括電源模塊、中央處理器、面板按鍵輸入模塊、碼盤信號和霍爾信號輸入模塊、液晶顯示模塊、發(fā)動機信號輸出模塊、調(diào)理電路、分壓電路、繼電器驅(qū)動電路、通信模塊。
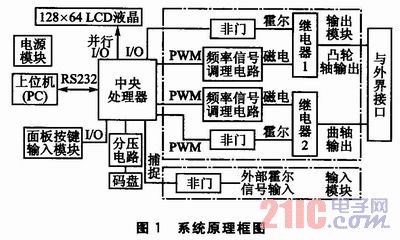
電源模塊采用12 V供電,為整個系統(tǒng)提供5 V電源和士15 V電源。發(fā)動機型號、傳感器參數(shù)等信息可以選擇面板按鍵輸入方式或者上位機輸入方式。發(fā)動機實時轉(zhuǎn)速可以選用手動模式或者自動模式。若采用手動模式,由面板鍵盤輸入特定值;若采用自動模式,由上位機輸入隨時間變化的速度曲線,或者采集碼盤信息得到實時速度值。液晶模塊來顯示發(fā)動機、傳感器參數(shù)和當(dāng)前發(fā)動機轉(zhuǎn)速。輸出模塊包括凸輪軸信號輸出和曲軸信號輸出,繼電器1為凸輪軸信號選擇模式,繼電器2為曲軸信號選擇模式。輸入模塊中有外部凸輪軸霍爾信號和外部曲軸霍爾信號,兩信號由單片機采集后,經(jīng)輸出模塊轉(zhuǎn)換輸出磁電信號。
2 硬件設(shè)計
2.1 處理器選擇
該模擬器是汽車電子系統(tǒng)開發(fā)中的一個重要工具,所以要選擇滿足寬溫度限、強抗電磁干擾等最基本要求的汽車級別單片機。同時,為了縮減成本,價格低廉也是非常必要的。模擬器選擇Freescale公司的8位處理器MC9S08DZ60。它具有4 KB的RAM、2 KB的EEPROM、60 KB的可編程Flash;包含2路定時脈沖寬度調(diào)節(jié)器,其中TPM1具有6個PWM通道,TPM2具有2個PWM通道。
2.2 磁電信號調(diào)理電路
實際發(fā)動機轉(zhuǎn)速的磁電信號是一組近似于正弦波信號的模擬信號,低速下其幅值為-1~+1,高速時幅值變化可達(dá)到-15~+15。本模擬器采用PWM信號逼近正弦的方式來生成磁電信號。
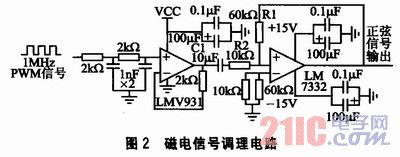
磁電信號調(diào)理電路如圖2所示。
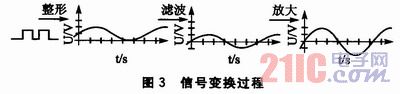
信號的調(diào)理過程分為以下3個部分:
①整形。輸入信號是頻率固定為1 MHz的PWM信號,其占空比按照正弦規(guī)律變化,經(jīng)過LMV931整形后得到向上平移后的正弦波。
②濾波。電容C1起到濾波的作用,濾除信號中的直流分量,正弦信號整體向下平移,得到標(biāo)準(zhǔn)的正弦波形。
③放大。標(biāo)準(zhǔn)正弦波最大幅值只有2.5 V,不能滿足磁電信號的要求,所以經(jīng)過LM7332放大一次,放大倍數(shù)β=R1/R2。
信號變換過程如圖3所示。
3 軟件設(shè)計
整個軟件部分分為模擬器配置狀態(tài)和模擬器輸出狀態(tài)。配置狀態(tài)主要功能為通過面板鍵盤或者RS232通信設(shè)定發(fā)動機參數(shù)。輸出狀態(tài)主要功能是根據(jù)發(fā)動機參數(shù)和傳感器的組合輸出當(dāng)前需求轉(zhuǎn)速下的曲軸信號和凸輪軸信號。
3.1 逼近磁電正弦信號
模擬器是通過PWM信號軟件逼近的方式產(chǎn)生磁電信號。隨著一個周期所分段數(shù)的逐漸增加,逼近的精度也逐步提高。但為了防止高速時程序頻繁進(jìn)出中斷會影響程序其他部分的運行,逼近所分段數(shù)不可過多。綜合逼近精度、單片機的總線頻率和正弦信號的對稱性考慮,把凸
輪軸磁電信號的一個正弦周期平分20等份,通過不同占空比的PWM信號來逼近正弦信號中的20段,如圖4(a)所示;把曲軸信號的一個正弦周期平分12等份,通過不同占空比的PWM信號來逼近其中的12段,如圖4(b)所示。
計算逼近各點時間間隔。計算公式如下:
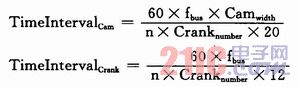
其中,TimeIntervalCrank為曲軸信號逼近各點時間的間隔計數(shù)值;TimeIntervalCam為凸輪軸信號逼近各點時間的間隔計數(shù)值;fbus為時鐘總線頻率(Hz);Cranknumber為曲軸齒數(shù)(60、48);Camwidth為凸輪軸齒寬(1,2,3…);n為發(fā)動機目標(biāo)轉(zhuǎn)速(rpm)。
圖4中,實線為逼近的目標(biāo)曲線,虛線為逼近得到的曲線,逼近后的曲線相對于目標(biāo)曲線向右平移了一小段相位,在程序中應(yīng)提前逼近的開始時間,以消除逼近相位誤差。
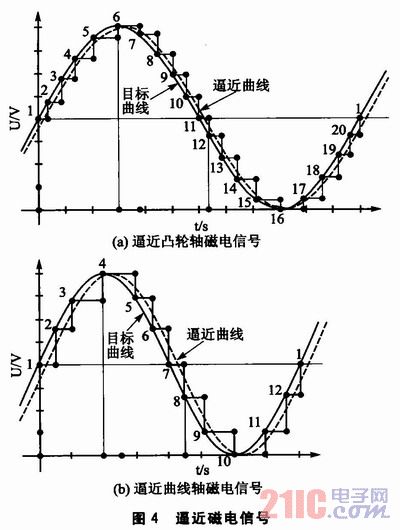
PWM通道的模數(shù)寄存器的值恒定為19,正弦信號最大值對應(yīng)的值寄存器的值為Rang,如圖4中的“6”點和“4”點。為了保證正弦信號的幅值隨著轉(zhuǎn)速值而變化,Rang隨發(fā)動機轉(zhuǎn)速增加而增大,Rang=Rang(nspeed)。
當(dāng)逼近一個曲軸信號正弦波時,正弦信號中各點對應(yīng)的正弦值如表1所列。各點對應(yīng)的單片機值寄存器的值為TPM2CV0=Rang(nspeed)×Sin(Number)。同理,可以得到逼近凸輪軸磁電信號20個點對應(yīng)值寄存器的值TPM2CV1。

為了省去單片機做乘除法運算所占的時間,在程序中將各點對應(yīng)的寄存器值做成數(shù)組,直接調(diào)用。如果要逼近與圖4極性相反(先負(fù)后正)的正弦波,只需顛倒各點逼近順序,即逼近順序為20,19,18,…,2,1。
3.2 生成凸輪軸信號和曲軸信號
曲軸信號流程如圖5所示。首先判斷曲軸信號模式。
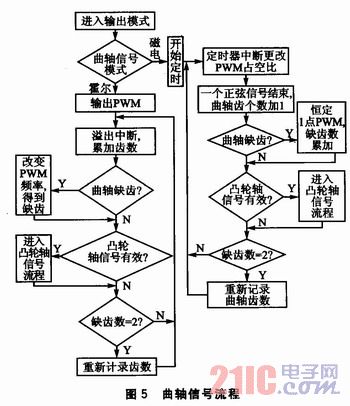
若模式為霍爾,則輸出PWM霍爾信號。在溢出定時中斷內(nèi)累加曲軸齒數(shù),若判斷曲軸缺齒有效,則改變PWM頻率,得到2個缺齒信號后,一個循環(huán)結(jié)束,曲軸齒數(shù)重新計數(shù)。在主程序中判斷何時輸出凸輪軸信號。
若模式為磁電,則輸出PWM逼近信號,開始逼近定時。在定時中斷中設(shè)置逼近各點的占空比,記錄逼近點個數(shù),一個正弦周期結(jié)束后,曲軸齒數(shù)累加1。若判斷缺齒有效,則輸出圖4中恒定“1”點所對應(yīng)占空比的PWM信號,兩個缺齒后一個曲軸循環(huán)結(jié)束,曲軸齒數(shù)重新計數(shù)。在主程序中判斷何時輸出凸輪軸信號。
凸輪軸信號流程:若信號模式為霍爾,則在主程序中通過I/O口輸出霍爾信號。若信號模式為磁電,則輸出逼近PWM信號,在定時中斷中設(shè)置逼近各點的占空比,記錄逼近點個數(shù),一個正弦周期結(jié)束后結(jié)束逼近定時,輸出圖4中恒定“1”點所對應(yīng)占空比的PWM信號。
4 實驗驗證
設(shè)定模擬器參數(shù)如下:曲軸齒數(shù)為(60-2)個齒,凸輪軸齒數(shù)為(4+1)個齒,凸輪軸齒寬為6個曲軸齒寬,多齒超缺齒12℃A(曲軸轉(zhuǎn)角是以℃A表示),凸輪多齒超凸輪1齒為60℃A。通過示波器觀察得到圖6所示的信號。
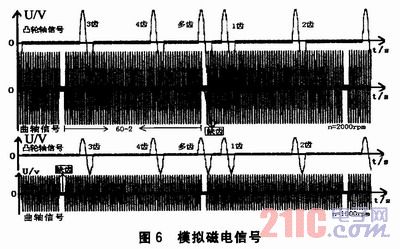
圖6所示曲軸信號模式和凸輪軸信號模式均為磁電。模擬信號滿足設(shè)定參數(shù)要求,并且幅值、相位準(zhǔn)確,相對相位準(zhǔn)確,頻率穩(wěn)定。上下兩組信號的轉(zhuǎn)速分別為2000rpm和1000 rpm。比較可知,磁電信號幅值隨轉(zhuǎn)速而變化。
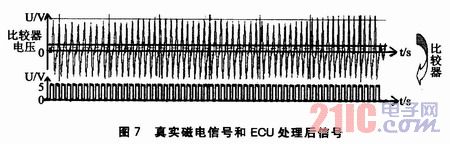
真實測得的磁電信號以及經(jīng)ECU處理后的信號如圖7所示。該信號在ECU中經(jīng)過比較器處理后轉(zhuǎn)換為方波信號,進(jìn)而被單片機采集。模擬得到的磁電信號經(jīng)過比較器后,同樣轉(zhuǎn)換為一個方波信號。雖然模擬信號與真實磁電信號存在差異,但是經(jīng)過比較器后得到形同的方波信號,對單片機來說就是相同的信號,所以模擬信號能夠替代真實的磁電信號。
5 結(jié)論
實驗證明,PWM信號逼近正弦信號的方法可以在8位機上模擬出標(biāo)準(zhǔn)的磁電正弦信號,并且該信號可以替代真實的磁電信號。本模擬器系統(tǒng)可以在100~6000 rpm范圍內(nèi)精確模擬發(fā)動機轉(zhuǎn)速信號,滿足設(shè)計要求。由于8位單片機的處理能力有限,該模擬器不能實現(xiàn)磁電信號幅值隨著轉(zhuǎn)速連續(xù)、線性地變化,但是并不影響模擬器的功能。若改為使用。DSP處理器,采用級數(shù)逼近或者迭代逼近的方法即可實現(xiàn)。
