
1 引言
賽車剎車系統(tǒng)是賽車系統(tǒng)上具有相對獨立功能的子系統(tǒng),其作用是承受賽車的靜態(tài)重量、動態(tài)沖擊載荷以及吸收賽車剎車時的動能,實現(xiàn)賽車的制動與控制。其性能的好壞直接影響到賽車的快速反應、安全制動和生存能力,進而影響賽車的整體性能。本文設計了賽車全電防滑剎車控制器的硬件和軟件,最后研究了適合于賽車剎車的控制律。
2 系統(tǒng)硬件電路設計
本賽車剎車控制器是由防滑控制器和電機驅動控制器組成。兩個控制器都是以DSP芯片為核心。防滑控制器主要是以滑移率為控制對象,輸出給定的剎車壓力,以DSP芯片為CPU,外加賽車和機輪速度信號調理電路等。電機驅動控制器主要是調節(jié)剎車壓力大小,并且控制電動機電流大小,也是以DSP芯片為CPU,再加外圍電路電動機電流反饋調理電路、過流保護電路、剎車壓力調理電路、四組三相全橋逆變電路等構成電機驅動控制器。
2.1 DSP的最小系統(tǒng)
DSP的最小系統(tǒng)主要涉及存儲器擴展、JTAG接口配置、復位電路、ADC模塊的設置以及時鐘電路的設計等。
1、片外存儲器擴展。片外存儲器是為了彌補DSP內部RAM的不足,同時也考慮到調試過程中可以方便將程序下載到片外高速Static RAM中。外部的靜態(tài)隨機存儲器采用CY7C1041CV33。DSP既可以使用片內程序存儲器,也可以使用片外程序存儲器,這由引腳XMP刀MC決定的。JTAG接口。在程序需要調試時,程序下載是通過JTAG接口完成的,這個接口經過仿真器與PC機的并行口相連。
2、復位電路與時鐘源模塊。用阻容電路產生上電復位和手動復位的低電平復位電路,產生復位信號。外加一個硬件看門狗,其輸出端產生復位信號WDRST。電源芯片的兩個輸入都為+5V,輸出為+1.9V和+3.3V電源為DSP供電,輸出電源分別有兩個復位信號,當電源不穩(wěn)或過低時,將產生復位信號。
3、模數(shù)轉換ADC模塊的硬件配置。模數(shù)轉換ADC輸出電壓2V,要求輸出端接一個低的ESR容量為10μF的陶瓷電容到模擬地。如果軟件設置在外部參考模式下,ADCREFP能夠接外部輸入為2V的參考電壓,并且接一個低的ESR容量為1μF到10μF的電容。否則,AD的內部參考源的精度將受到影響。
2.2賽車前輪與剎車機輪速度信號處理電路
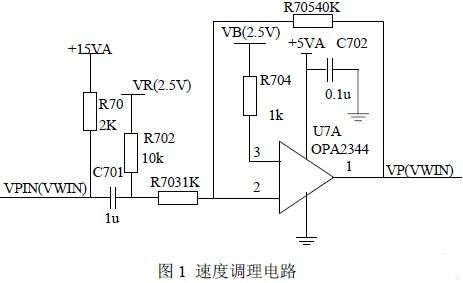
賽車防滑控制器主要是以滑移率為控制對象,防止賽車打滑,由滑移率的偏差大小調節(jié)后輸出壓力參考值,以跟蹤給定的滑移率大小。防滑控制器上必須有賽車前輪和剎車機輪速度信號的調理電路,主要是為了得到反饋的滑移率。賽車速度信號是以自由滾動的賽車前輪速度信號代替。在賽車的前輪與剎車機輪上都裝有測速傳感器,當輪子轉動時,測速傳感器會產生正弦波形式的交流信號,機輪每轉動一圈,測速傳感器發(fā)出50個周期的正弦交流信號。正弦交流信號的振幅隨輪子速度的變化而變化,其信號為偏壓2.5V,峰值為0.3V,最大信號幅值不超過5V的正弦波信號。將此正弦波信號轉換成同頻率的方波后送入DSP的捕獲單元,捕獲方波相鄰上升沿的計數(shù)值間隔ncapture,即可計算得到輪子的轉速值V。由于CPUCLK為150MHz,捕獲時基為其中的一個定時器,n為CPUCLK的分頻系數(shù),凡為輪子的滾動半徑,那么輪子速度的計算式為:

調理電路如圖1所示:
2.3 邏輯信號電路
電機驅動器選用ALTERA公司的MAX7000A系列器件對電機的轉子位置等信號進行邏輯處理,選用多達有76路可編程I/0口和100引腳的EPM7128AE,該CPLD能夠滿足系統(tǒng)設計要求。器件EPM7128AE實現(xiàn)了電機的三相全橋逆變電路觸發(fā)信號、過流保護、正反轉、三相全橋的開通與關斷等功能。一片CPLD器件EPM7128AE上有兩個電機的邏輯信號。由于無刷直流電動機的霍爾位置傳感器CS3020的輸出是集電極開路結構,故上拉2KΩ電阻,再把霍爾信號SA, SB, SC送到CPLD的輸入端口。其JTAG接口的TMS, TCK, TDI, TDO四個端子必須接上拉電阻,再接+5V電源。
2.4 無刷直流電動機的功率驅動電路
無刷直流電動機的功率驅動電路采用以IR公司的專用驅動芯片IR2130為中心的6個N溝道的MOSFET管組成的三相全橋逆變電路。其輸入為以功率地為地的PWM波,送到IR2130的輸入端口,輸出控制N溝道的功率驅動管MOSFET,由此驅動無刷直流電動機。采用這種驅動方式主要是功率驅動芯片IR2130對“自舉”技術形成懸浮的高壓側電源的巧妙運用,簡化了整個驅動電路的設計,提高了系統(tǒng)的可靠性。而且IR2130驅動芯片內置死區(qū)電路,以及過流保護和欠壓保護等功能,大大降低了電路設計的復雜度,進一步提高了系統(tǒng)的可靠性。
1 引言
賽車剎車系統(tǒng)是賽車系統(tǒng)上具有相對獨立功能的子系統(tǒng),其作用是承受賽車的靜態(tài)重量、動態(tài)沖擊載荷以及吸收賽車剎車時的動能,實現(xiàn)賽車的制動與控制。其性能的好壞直接影響到賽車的快速反應、安全制動和生存能力,進而影響賽車的整體性能。本文設計了賽車全電防滑剎車控制器的硬件和軟件,最后研究了適合于賽車剎車的控制律。
2 系統(tǒng)硬件電路設計
本賽車剎車控制器是由防滑控制器和電機驅動控制器組成。兩個控制器都是以DSP芯片為核心。防滑控制器主要是以滑移率為控制對象,輸出給定的剎車壓力,以DSP芯片為CPU,外加賽車和機輪速度信號調理電路等。電機驅動控制器主要是調節(jié)剎車壓力大小,并且控制電動機電流大小,也是以DSP芯片為CPU,再加外圍電路電動機電流反饋調理電路、過流保護電路、剎車壓力調理電路、四組三相全橋逆變電路等構成電機驅動控制器。
2.1 DSP的最小系統(tǒng)
DSP的最小系統(tǒng)主要涉及存儲器擴展、JTAG接口配置、復位電路、ADC模塊的設置以及時鐘電路的設計等。
1、片外存儲器擴展。片外存儲器是為了彌補DSP內部RAM的不足,同時也考慮到調試過程中可以方便將程序下載到片外高速Static RAM中。外部的靜態(tài)隨機存儲器采用CY7C1041CV33。DSP既可以使用片內程序存儲器,也可以使用片外程序存儲器,這由引腳XMP刀MC決定的。JTAG接口。在程序需要調試時,程序下載是通過JTAG接口完成的,這個接口經過仿真器與PC機的并行口相連。
2、復位電路與時鐘源模塊。用阻容電路產生上電復位和手動復位的低電平復位電路,產生復位信號。外加一個硬件看門狗,其輸出端產生復位信號WDRST。電源芯片的兩個輸入都為+5V,輸出為+1.9V和+3.3V電源為DSP供電,輸出電源分別有兩個復位信號,當電源不穩(wěn)或過低時,將產生復位信號。
3、模數(shù)轉換ADC模塊的硬件配置。模數(shù)轉換ADC輸出電壓2V,要求輸出端接一個低的ESR容量為10μF的陶瓷電容到模擬地。如果軟件設置在外部參考模式下,ADCREFP能夠接外部輸入為2V的參考電壓,并且接一個低的ESR容量為1μF到10μF的電容。否則,AD的內部參考源的精度將受到影響。
2.2賽車前輪與剎車機輪速度信號處理電路
賽車防滑控制器主要是以滑移率為控制對象,防止賽車打滑,由滑移率的偏差大小調節(jié)后輸出壓力參考值,以跟蹤給定的滑移率大小。防滑控制器上必須有賽車前輪和剎車機輪速度信號的調理電路,主要是為了得到反饋的滑移率。賽車速度信號是以自由滾動的賽車前輪速度信號代替。在賽車的前輪與剎車機輪上都裝有測速傳感器,當輪子轉動時,測速傳感器會產生正弦波形式的交流信號,機輪每轉動一圈,測速傳感器發(fā)出50個周期的正弦交流信號。正弦交流信號的振幅隨輪子速度的變化而變化,其信號為偏壓2.5V,峰值為0.3V,最大信號幅值不超過5V的正弦波信號。將此正弦波信號轉換成同頻率的方波后送入DSP的捕獲單元,捕獲方波相鄰上升沿的計數(shù)值間隔ncapture,即可計算得到輪子的轉速值V。由于CPUCLK為150MHz,捕獲時基為其中的一個定時器,n為CPUCLK的分頻系數(shù),凡為輪子的滾動半徑,那么輪子速度的計算式為:
調理電路如圖1所示:
2.3 邏輯信號電路
電機驅動器選用ALTERA公司的MAX7000A系列器件對電機的轉子位置等信號進行邏輯處理,選用多達有76路可編程I/0口和100引腳的EPM7128AE,該CPLD能夠滿足系統(tǒng)設計要求。器件EPM7128AE實現(xiàn)了電機的三相全橋逆變電路觸發(fā)信號、過流保護、正反轉、三相全橋的開通與關斷等功能。一片CPLD器件EPM7128AE上有兩個電機的邏輯信號。由于無刷直流電動機的霍爾位置傳感器CS3020的輸出是集電極開路結構,故上拉2KΩ電阻,再把霍爾信號SA, SB, SC送到CPLD的輸入端口。其JTAG接口的TMS, TCK, TDI, TDO四個端子必須接上拉電阻,再接+5V電源。
2.4 無刷直流電動機的功率驅動電路
無刷直流電動機的功率驅動電路采用以IR公司的專用驅動芯片IR2130為中心的6個N溝道的MOSFET管組成的三相全橋逆變電路。其輸入為以功率地為地的PWM波,送到IR2130的輸入端口,輸出控制N溝道的功率驅動管MOSFET,由此驅動無刷直流電動機。采用這種驅動方式主要是功率驅動芯片IR2130對“自舉”技術形成懸浮的高壓側電源的巧妙運用,簡化了整個驅動電路的設計,提高了系統(tǒng)的可靠性。而且IR2130驅動芯片內置死區(qū)電路,以及過流保護和欠壓保護等功能,大大降低了電路設計的復雜度,進一步提高了系統(tǒng)的可靠性。
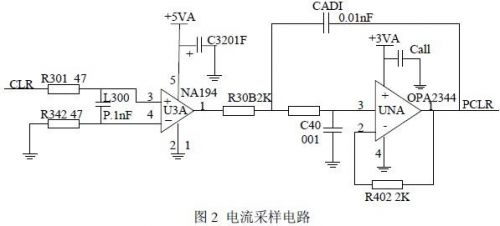
2.5 電流采樣及過流保護電路
無刷直流電動機的電流是通過功率驅動電路母線上的電阻進行檢測的。母線上面的電阻是由兩個0.01Ω的功率電阻并聯(lián),采樣電路是通過這兩個并聯(lián)的采樣電阻進行電流采樣的,采樣電阻將電流信號轉換為電壓信號,電壓信號送到電流監(jiān)控芯片進行放大,然后經過由OPA2344構成二階有源濾波電路濾波,最后得電流反饋信號,直接送到A/D轉換器。
硬件過流保護電路,對系統(tǒng)的正常工作起到很重要的作用,主要是對功率器件MOSFET和電動機的保護。系統(tǒng)還帶有軟件保護功能,過流信號OVCURX送到DSP的輸入引腳,當OVCUR為高電平時,DSP會產生電機控制轉動信號ENABLE關斷邏輯信號,使電機停轉。芯片IR2130自身帶有過流保護功能。
2.6 壓力信號放大電路及其調理電路
壓力信號放大器采用差分式實現(xiàn)的減法運算的放大電路,以超低漂移電壓運算放大器為核心,放大倍數(shù)為40倍,放大器還配有調零位和靈敏度調節(jié)的功能。其中芯片7809為電源芯片7660提供+9V電壓的,芯片7660將+9V的電壓變?yōu)?9V,這兩個電壓+9V和-9V同時為OP07供電。
由于從電壓信號放大器出來的電壓信號范圍為+1V~+5V,而DSP的A/D模塊的參考電壓為+3.3V,則采樣的電壓信號的最大值不能超過+3.3V。因此電壓信號要經過調理電路將電壓信號減小到+3.3v以下。調理電路采用精密的運算放大器OPA2344,將電壓信號由+1V~+5V調理到+3V以下,需要設定放大倍數(shù)為0.6,以便于DSP進行采樣。
3 控制器軟件設計
本賽車剎車控制器的軟件以C語言為主體,適當?shù)牟捎脜R編語言,這樣的軟件編寫給整個系統(tǒng)軟件帶來了方便。C語言使DSP程序的開發(fā)速度加快,而且可讀性和可移植性也大大增加,在TI公司的C2000 Code Composer Studio(CCS)集成開發(fā)環(huán)境下進行程序調試。由于篇幅限制,此處僅介紹系統(tǒng)程序初始化以及主程序流程。
1、系統(tǒng)程序初始化。系統(tǒng)的程序在運行前,必須對DSP的時鐘源、定時器、看門狗、AD模塊、I/O口、捕獲單元、中斷等等進行初始化設置,使系統(tǒng)的內部資源、外圍設備和硬件電路相匹配。系統(tǒng)在運行前,必須關掉所有的中斷,以防止程序運行時產生不必要的中斷或者程序跑飛等現(xiàn)象。因此在初始化后,系統(tǒng)才啟動中斷,使程序正常運行。
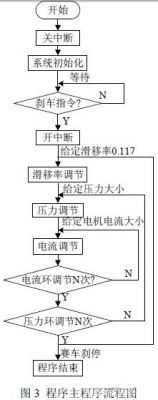
2、系統(tǒng)主程序流程。賽車全電剎車系統(tǒng)的主程序包括程序初始化模塊、定時器中斷服務、模擬量定時采樣模塊、速度信號的捕獲模塊、滑移率控制模塊、壓力調節(jié)模塊、電流調節(jié)模塊等等。其中,定時器中斷服務程序給電流、壓力、滑移率模塊提供固定的時鐘觸發(fā),以此時間作為各個模塊的調節(jié)基準。當程序運行時,首先關斷系統(tǒng)的總中斷,完成初始化,接收到剎車命令后,開啟總中斷,進入程序調節(jié)的死循環(huán),直到程序運行結束。電流環(huán)調節(jié)的時間最短,反映最快,其調節(jié)時間長短與電流信號濾波參數(shù)、DSP采樣速度、CPU時鐘周期、軟件濾波程序等都有關系,一般時間為零點幾個毫秒。而壓力調節(jié)環(huán)的時間設定為電流調節(jié)環(huán)的N倍,電流調節(jié)環(huán)和壓力調節(jié)環(huán)的調節(jié)次數(shù)可以現(xiàn)場測定調節(jié)時間而確定,滑移率調節(jié)時間更長。系統(tǒng)的主程序流程圖如圖3所示。
4 系統(tǒng)模糊控制策略
模糊控制器是模糊控制在控制系統(tǒng)中應用的關鍵部分,其主要過程為將取到的系統(tǒng)控制回路中被控過程輸出的精確量進行模糊化,并且作為模糊控制器的輸入。模糊控制器的輸入和輸出都是實際的精確量。然后進行模糊推理,在內部建立語言型的模糊控制規(guī)則,由輸入條件判斷模糊輸出。最后將模糊量轉化為實際的精確量,即去模糊化。模糊控制器設計的具體過程如下圖4所示。
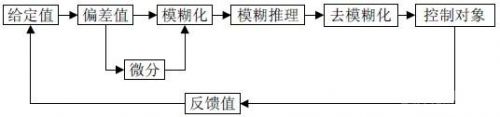
圖4 模糊控制器原理圖
本文作者創(chuàng)新點
本文主要完成了賽車剎車控制系統(tǒng)的設計,主要是硬件設計、軟件設計和控制策略研究。硬件設計方面采用高速的DSP芯片和CPLD并設計其外圍的電路。系統(tǒng)還設計了以IR2130為核心的驅動電路,電流信號硬件放大電路、濾波電路和保護電路,壓力信號的放大電路和濾波電路,賽車速度和機輪速度的處理電路等等。控制策略方面采用模糊控制調節(jié)PID參數(shù)。