
摘要:本論文的主要目的就是設計一種基于DSP的模塊化教育機器人硬件系統(tǒng),。該教育機器人是以智能小車為載體基于 TMS320LF2407A微控制器的嵌入式控制平臺及編程環(huán)境的一款開放式的機器人控制系統(tǒng),,以各傳感器模塊設計應用為核心,,采用模塊化設計思想進行設計,包括系統(tǒng)總體框架的設計,、無線通信模塊和系統(tǒng)電源,、電機驅動硬件電路模塊的設計。
關鍵詞:教育機器人,;TMS320LF2407A,;傳感器;硬件模塊
0 引言
智能機器人作為一個高新科技的綜合體,,直接反應了一個國家信息技術的發(fā)展水平,,受到了社會各界的高度重視。最近這些年,,在我國大學里已經(jīng)將機器人作為機械電子學,、計算機技術、人工智能等的載體廣泛適用于工科本科生的講授課程,,在中學,,教育機器人則逐漸成為素質(zhì)教育、技能實踐活動的選題之一,,各種機器人比賽正蓬勃發(fā)展,。智能機器人涉及了信息技術的幾乎所用內(nèi)容,可以讓學生接觸并看到信息技術的全景,,并且智能機器人是信息技術的開放平臺,,學生可以充分發(fā)揮想象力去開發(fā)各種智能裝置,從而培養(yǎng)學生對信息技術的開發(fā)能力,,在開發(fā)過程中,培養(yǎng)各種能力,,激發(fā)學生的興趣,。
1 設計思想與總體方案
1.1 教育機器人的設計思想
本教育機器人以TMS320LF2407A微控制器為核心,由紅外傳感器和光電傳感器等各種傳感器采集的外部環(huán)境信息作為輸入信號,,通過DSP進行運算處理,,利用PWM技術實時輸出調(diào)整小車的速度和方向,實現(xiàn)小車尋跡,、避障,、尋跡加避障等自動控制的功能,,另外在小車于尋跡過
程中遇到障礙物,當尋跡加避障算法在尋跡的同時不能完成避障功能時,,可由PC機與其相連的無線通信收發(fā)模塊和DSP相連的另一無線收發(fā)模塊實現(xiàn)無線短距離通信,,控制小車脫離障礙區(qū)并進行正常尋跡。
1.2 總體設計方案和框圖
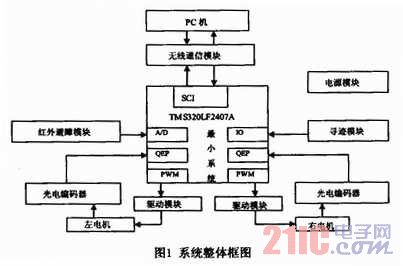
機器人小車系統(tǒng)整體框圖如圖1所示,,主要有TMS320LF2407A最小系統(tǒng)部分,、電源模塊、電機驅動模塊,、傳感器模塊,、無線通信模塊構成,實現(xiàn)由車載的各種傳感器將信息不斷地傳遞給車載微控制器,,并將編程設計算法下載至微控制器實現(xiàn)實時調(diào)整小車的運動狀態(tài),,完成一定的功能要求。
2 系統(tǒng)硬件模塊設計
2.1 TMS320LF2407A最小系統(tǒng)設計
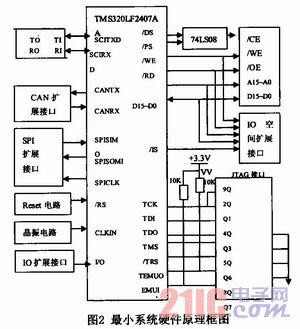
TMS320LF2407A是2000系列中目前應用最為廣泛的產(chǎn)品,,它在片上不僅具有一個適于進行數(shù)字信號處理的高效處理器,,而且還集成了存儲器和適應控制領域應用的豐富片上外設,從而構成了一個基本的片上計算機系統(tǒng),。除了具有改進的哈佛結構,、多總線結構和流水線結構等優(yōu)點外,它還采用高性能靜態(tài) CMOS技術,,電壓降為3.3V,,減少了功耗,指令執(zhí)行速度提高到40MIPS,,幾乎所有指令都可以在2 5ns的單周期內(nèi)完成,。TMS320LF2407A的基本結構包括中央處理器單元(CPU)、存儲器,、片內(nèi)外設與專用硬件電路三個組成部分,。本系統(tǒng)硬件平臺充分利用TMS320LF2407A控制器的特點采用模塊化設計,分為基本電路和擴展控制電路部分,?;倦娐钒娫措娐贰臀浑娐?、時鐘電路,、A/D 輸入通道和JTAG仿真電路等。擴展電路包括存儲器及譯碼電路,、串行通信SCI與RS-232接口電路,、CAN接口電路、SPI功能模塊等。系統(tǒng)硬件原理框圖如圖2所示,。
2.2 尋跡模塊設計
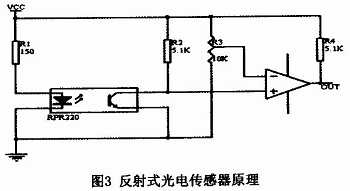
此部分采用光電傳感器對路面信息進行識別,。采用RPR220型光電對管,RPR220是一種一體化反射型光電探測器,,其發(fā)射器是一個砷化鎵紅外發(fā)光二極管,,接收管是一個高靈敏度的硅平面光電三極管,用3個該紅外對管構成“一”字形排列在小車車頭的底部,,路徑軌跡由黑線指示,,根據(jù)落在黑線區(qū)域的光電三極管接收到的反射光線強度與白色區(qū)域的不同,由檢測到的黑線光電管的位置來判斷小車的位置方向看其是否偏離黑線,,當紅外對管的發(fā)射二極管發(fā)出紅外線,,經(jīng)反射物 (白線)反射到接收管,是接收管集電極與發(fā)射極之間的電阻變小,,輸入端電位變低,,經(jīng)比較器比較后輸出低電平,當紅外線照射到黑線上時,,反射到接收管上的光亮減小,,接收管的集電極與發(fā)射極間電阻增大使得輸出高電平,將輸出端信號送至2407A進行分析處理,,反射式光電傳感器原理如圖3所示,。3個傳感器中如果位于中間的傳感器(中傳感器)檢測到黑線,從傳感器將發(fā)出“有線”信號,,后輪兩電機繼續(xù)接通運轉,,結果驅動車體前進。如果除中傳感器之外,,左,、右傳感器中的任一個未檢測到黑線,則該傳感器輸出“無線”信號,,這時脫離引導線的傳感器對側的驅動電機停止運行,,同側電機繼續(xù)運行,以此達到校正行進方向的目的,。
2.3 紅外避障模塊設計
在小車行進過程中遇到障礙物,,無法正常通過時,采用紅外線檢測器檢測障礙物,,并設計算法控制小車繞開障礙物繼續(xù)尋跡前進,。在小車前端兩側分別安裝1個紅外發(fā)射二極管(如東芝TLN110)進行紅外信號的發(fā)射,紅外線光源發(fā)出的信號調(diào)制到38kHz,,使用2407A的PWM輸出產(chǎn)生精確的信號,。紅外接收器由安裝在車頭中央的專用紅外接收模塊(如CRVPl738)對紅外信號進行接收。小車前進路線中障礙物的判斷原則:a.左邊紅外發(fā)射二極管發(fā)射信號,,檢測中央接收端,,判斷是否接收到信號;b.右邊紅外發(fā)射二極管發(fā)射信號,,檢測中央接收端,,判斷是否接收到信號;c.若左邊發(fā)射時,,有信號接收則小車左邊有障礙物,;若右邊發(fā)射時,有信號接收則小車右邊有障礙物,;若左邊和右邊發(fā)射時,,都有信號接收則小車正前方有障礙物。
在小車前進過程中有三種避障算法:沿左邊行走,,沿右邊行走,,左右相結合行走。本設計要實現(xiàn)在多種環(huán)境下都能避障,,所以選擇左右結合行走的算法,。在小車左、右側兩側等比例安裝若干紅外測距傳感器(GP2D12),,用于防止小車在避障過程中與障礙物發(fā)生碰撞,,由于GP2-D12輸出為0.4~2.4V的模擬信號,對應80~10cm距離,,輸出與距離成反比關系,,且為非線性,可直接利用2407A集成的A/D轉換功能,,進行A/D轉換得到相應參數(shù),,根據(jù)參數(shù)由 DSP進行相應處理,進行避障前進,。在避障過程中,,采用接近式控制策略,維持障礙物和傳感器之間的距離為一固定常數(shù),,當兩者距離偏小時,,機器人向遠離障礙物的方向旋轉;當兩者距離偏大時,,向靠近障礙物的方向旋轉,。小車沿障礙物行進過程中,在車頭底部光電傳感器檢測到黑線時,,小車開始調(diào)整行進姿勢,,遠離障礙物,,繼續(xù)尋跡。另外在小車無法成功繞過障礙物繼續(xù)尋跡時,,可以通過無線通信模塊控制小車繞過障礙物使其繼續(xù)尋跡,。
2.4 無線通信模塊設計
在機器人無法成功避障的情況下,可通過DSP與上位機(PC機)之間的通信協(xié)作來完成避障任務,。DSP與PC機之間的通信方式分為有線和無線兩種,,多數(shù)采用串行通信。在本設計中采用無線通信方式,,可以克服有線通信造成的操作不便,。PTR2000是基于nRF401器件的無線數(shù)據(jù)傳輸模塊,具有低頻發(fā)射,、靈敏度高的特點,,使其在嵌入式短程無線產(chǎn)品中得到廣泛的應用。要實現(xiàn)DSP與PC機之間的無線通信,,需在DSP與小車車體分別安裝一個 PTR2000器件,,其系統(tǒng)硬件結構框圖如圖4所示。通過2407A的RXD和TXD引腳與PTR2000的DO和DI引腳直接相連,,2407A的控制引腳與PTR2000模式控制引腳相連完成PTR2000于DSP之間的連接,,通過采用MAX232器件在PTR2000和計算機串口進行RS-232和 TTL電平之間的轉換后,完成PTR2000和PC機串口的連接,。在DSP和PC機端軟件配合設置PTR2000的狀態(tài)(發(fā)射或接收),,選擇固定的通信頻道,并讓PTR2000一直處于正常工作狀態(tài),,再通過設計軟件系統(tǒng)實現(xiàn)無線通信的功能,。

2.5 電源模塊設計
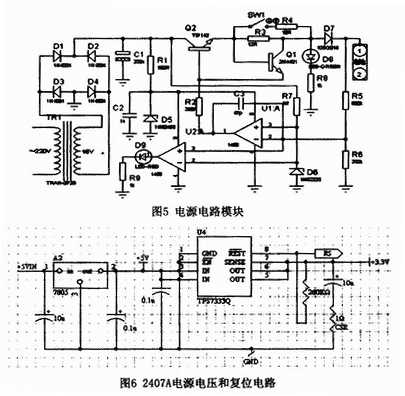
電源模塊可由16V交流電壓充電器通過電源充電電路為6節(jié)車載鎳鎘電池(約7.2V)充電,為各模塊提供工作電壓,。電源電路模塊如圖5所示,。由于各模塊所需工作電壓不同,可先通過使用78(L)05穩(wěn)壓器得到5V直流電壓,,2407A所需3.3V電源由帶集成延時復位功能的低壓差穩(wěn)壓器TPS733Q實現(xiàn),,同時具有復位功能。如圖5所示,。
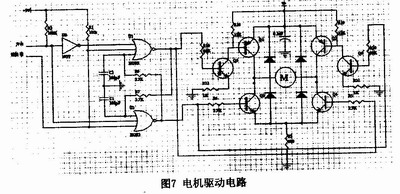
2.6 電機驅動模塊設計
本輪式機器人平臺采用左,、右直流電機驅動的方式,中間有一起支撐作用的萬向輪,。電機驅動模塊可以實現(xiàn)兩電機在任何方向旋轉從而達到小車前進,、倒退和轉向的目的。電機發(fā)生轉向與否是由提供給電機驅動電路的高,、低電壓信號次序決定的,,它們來自前端的數(shù)字邏輯門定序電路,。數(shù)字邏輯定序電路的輸入信號由2407A 產(chǎn)生的方向信號和PWM信號實現(xiàn)機器人的方向和速度的控制分為方向端和使能端,該電路同時可以避免產(chǎn)生電源短路對電子器件造成的損害,。此小車電機驅動電路是H橋驅動電路,,該電路通過控制電機電流流向達到控制轉向的目的。當Q1和04導通時,,電機電流從左流向右,電機正轉,;當Q2和Q3導通時,,電機電流從右流向左,電機反轉,。如圖7所示,。
3 系統(tǒng)整體實現(xiàn)
以TMS320LF2407A為核心的教育機器人硬件系統(tǒng)整體功能可在軟件開發(fā)工具CCS和硬件開發(fā)工具XDS的支持下采用C語言和匯編語言混合編程進行程序仿真調(diào)試,再通過JTAG接口下載到DSP內(nèi)實現(xiàn),,給DSP學習者帶來了極大的方便,。同時,得益于2407A外部資源的豐富性,,系統(tǒng)中未使用部分有利于學習者做進一步的功能開發(fā)和應用,。
4 結語
本文設計的以智能小車為載體的基于TMS320LF2407A教育機器人硬件平臺,包括電源模塊和電機驅動模塊電路設計,,并集成了紅外和光敏傳感器和無線數(shù)據(jù)傳輸模塊,,通過軟件設計可實現(xiàn)尋跡、避障及尋跡避障相結合的功能,,達到了理論課程學習與動手實踐相結合的目的,,鞏固了知識并進一步提高了學習者的興趣。該整體硬件系統(tǒng)結構簡單,,具有很好的擴展性,,而且通過軟件編程控制機器人完成一定的功能,很好地鍛煉了學生的邏輯思維能力和編程能力,,有助于培養(yǎng)學生的實踐能力和創(chuàng)新精神,。