
1 引言
仿人型機器人具有類似于人類基本外貌特征和步行運動功能,還具有視覺、聽覺等功能,它可以實現(xiàn)類似人類的行走,靈巧輕便,對行走環(huán)境有良好的適應(yīng)性,既能在平地上行走,又能在非結(jié)構(gòu)的復(fù)雜地面上行走,如上下臺階,跨越、繞過障礙物等。另外,仿人型機器人是集材料、機械、電子、能源驅(qū)動、計算機感知、傳感、控制、虛擬現(xiàn)實與人工智能等多門學(xué)科于一體的綜合性平臺,它的研究能夠帶動諸多相關(guān)學(xué)科和技術(shù)的交叉發(fā)展與進步,并為相關(guān)學(xué)科的研究提供一個平臺。因而,近年來,仿人型機器人的研發(fā)受到國內(nèi)外學(xué)者的廣泛關(guān)注。小型機器人是近年發(fā)展起來的仿人機器人" title="仿人機器人">仿人機器人的一種,主要的研究集中在日本。小型仿人機器人,結(jié)構(gòu)輕巧,集成度高,運動靈活;未來可在工業(yè)、民用、軍事等許多方面發(fā)揮作用,是機器人技術(shù)的發(fā)展方向之一。小型機器人的控制不僅要求實時,還要求重量輕,體積小以及低功耗等。
傳統(tǒng)的仿人機器人控制系統(tǒng)結(jié)構(gòu)采用集中式控制,如日本仿人機器人HRP-2[1],通常由一臺或多臺計算機通過多塊A/D" title="A/D">A/D,D/A模塊與下層的驅(qū)動器和傳感器連接通信。由上位機完成軌跡規(guī)劃和任務(wù)調(diào)度,協(xié)調(diào)下層各控制板對各關(guān)節(jié)進行控制。這樣的控制系統(tǒng)模塊繁多,模塊之間的連接復(fù)雜,依賴性強且相互耦合,降低了系統(tǒng)的開放性和可靠性,增加了功耗,難以完成多軸同步協(xié)調(diào)運動控制。
隨著計算機技術(shù)和網(wǎng)絡(luò)技術(shù)的發(fā)展,各種新型的控制方式應(yīng)用于機器人控制。分布式控制系統(tǒng)是在計算機監(jiān)督控制系統(tǒng)、直接數(shù)字控制系統(tǒng)和計算機多級控制系統(tǒng)的基礎(chǔ)上發(fā)展起來的,是生產(chǎn)過程的一種比較完善的控制與管理系統(tǒng)。與計算機多級控制系統(tǒng)相比,分布式控制系統(tǒng)在結(jié)構(gòu)上更加靈活、布局更為合理和成本更低。分布式控制結(jié)構(gòu)成為機器人控制系統(tǒng)發(fā)展的方向。文[2]中作者設(shè)計了一種基于CAN總線的分布式的仿人機器人的控制系統(tǒng)。
為此,我們研制了新型的小型仿人機器人控制系統(tǒng)。本實驗室研制的小型仿人機器人各關(guān)節(jié)采用舵機控制,根據(jù)要求,本設(shè)計需要實現(xiàn)小型仿人機器人腿部的運動控制,達到小型化,低功耗。
2 小型仿人娛樂機器人分布式控制系統(tǒng)
2.1總體方案設(shè)計
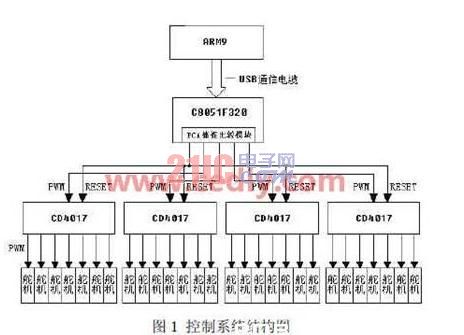
本文研究的小型仿人娛樂機器人運動控制系統(tǒng)由主控制器ARM9" title="ARM9">ARM9,C8051F320單片機與4片CD4017外部計數(shù)器構(gòu)成的控制單元組成,控制結(jié)構(gòu)簡單靈活。USB" title="USB">USB通信方案滿足了主從控制和通信速度的需求。關(guān)節(jié)執(zhí)行機構(gòu)采用舵機,控制方法簡單實用。總體控制方式簡圖見圖1。
主控制器端,采用ARM9(S3C2410)作為管理控制器負責(zé)協(xié)調(diào)控制,向單片機發(fā)送規(guī)劃好的運動控制數(shù)據(jù)并擴展語音,視頻等。S3C2410主控制器有一個USB host,連接C8051F320單片機。
單片機端,利用C8051F320中的PCA捕捉比較模塊產(chǎn)生PWM控制信號。當(dāng)單片機通過USB總線接收到由ARM管理控制器發(fā)來的數(shù)據(jù)包時,根據(jù)設(shè)定的對應(yīng)關(guān)系將數(shù)據(jù)包中16位控制數(shù)據(jù)轉(zhuǎn)化為PCA比較值,由PCA模塊產(chǎn)生相應(yīng)占空比的PWM控制信號,分別輸出給4片CD4017外部計數(shù)器。同時PCA模塊還定時產(chǎn)生一路復(fù)位脈沖,同時發(fā)送給4片CD4017,確保CD4017多路PWM輸出與單片機接收到多舵機控制數(shù)據(jù)對應(yīng)關(guān)系正確。
CD4017外部計數(shù)器將CP引角輸入的PWM轉(zhuǎn)化為多路PWM,分別控制與之相連的各舵機轉(zhuǎn)動,實現(xiàn)各桿件位置的開環(huán)控制。
2.2 USB通信的實現(xiàn)
在計算機和單片機的控制數(shù)據(jù)傳輸領(lǐng)域內(nèi),長期以來廣泛的使用RS-232,RS-485等通信方式,這些通信方式訊的實時性較差, 故障率較高, 出現(xiàn)故障時, 不容易排查[3]。不能夠滿足小型仿人機器人的實時性和大批量數(shù)據(jù)傳輸?shù)囊蟆SB總線通信方式作為新一代計算機外設(shè)的接口技術(shù),隨著USB技術(shù)的日益成熟,及獨特的優(yōu)點(對多種設(shè)備的廣泛適用性,自動配置,容易擴充,易于連接,熱插拔,即插即用、高可靠性,低成本,低功耗等),應(yīng)用前景非常廣泛[4]。
本控制系統(tǒng)中的管理控制器ARM9(S3C2410)集成了一個USB host,采用Linux操作系統(tǒng);C8051F320器件集成了全速/低速USB功能控制器,用于實現(xiàn)USB接口的外部設(shè)備,均支持USB2.0通信協(xié)議。單片機端設(shè)計了通信固件程序和應(yīng)用程序,用于接收USB通信內(nèi)容。
2.3 基于C8051單片機和CD4017外部計數(shù)器的關(guān)節(jié)控制器設(shè)計
采用一片單片機與4片CD4017外部計數(shù)器的關(guān)節(jié)控制器設(shè)計方案,極大限度的精簡了硬件數(shù)量,節(jié)省了空間,降低了軟硬件出錯的可能性,也為系統(tǒng)運動功能的擴展提供了足夠空間和靈活性(自由度數(shù)量設(shè)置可在36個以內(nèi)任意增減)。
基于C8051的設(shè)計中有很多方法用于產(chǎn)生PWM波形:軟件循環(huán)、查詢或中斷驅(qū)動的定時器等。使用可編程計數(shù)器陣列PCA產(chǎn)生PWM相對于任何查詢機制(基于軟件或定時器而言)可以大大降低所需要的CPU帶寬,并可以消除在中斷驅(qū)動的基于定時器的設(shè)計中因中斷延遲不一致而產(chǎn)生的時序抖動。PCA由一個專用的16位計數(shù)器/定時器和5個16位捕捉/比較模塊組成。每個捕捉/比較模塊有其自己的I/O線。計數(shù)器/定時器由一個可編程的時基信號驅(qū)動。計數(shù)器/定時器有一個16位的計數(shù)器/定時器寄存器、一個用于選擇時間基準(zhǔn)的方式寄存器和一個包含計數(shù)器/定時器運行控制及各模塊捕捉/比較標(biāo)志的控制寄存器。每個捕捉/比較模塊有一個用于選擇模塊工作方式的配置寄存器和一個16位的捕捉/比較寄存器。每個捕捉/ 比較模塊的工作方式都可以被獨立配置。由于所有的捕捉/比較模塊共享一個時間基準(zhǔn),因此它們同步工作[5][6]。本文研究的小型娛樂機器人關(guān)節(jié)控制器設(shè)計中,將PCA配置為獨立工作;每個模塊的中斷服務(wù)程序只影響該模塊的捕捉/比較寄存器。PCA方式寄存器和配置寄存器設(shè)置一次后不再改變,讓計數(shù)器/定時器寄存器自由運行。
在高速輸出方式,每當(dāng)PCA計數(shù)器與模塊的16位捕捉/比較寄存器發(fā)生匹配時,模塊I/O線的引腳上的邏輯電平將發(fā)生高低轉(zhuǎn)換,并可以選擇產(chǎn)生中斷。本應(yīng)用程序中選擇了該中斷。
Y9輸出均變?yōu)榈碗娖剑挥衁0腳輸出變?yōu)楦唠娖剑士梢岳肅R的正脈沖輸入中斷計數(shù)[7]。~Y9這10個輸出端,計滿10個數(shù)后計數(shù)器復(fù)零,同時CO端輸出一個進位脈沖。當(dāng)CR端有正脈沖輸入時,該脈沖的上升沿將觸發(fā)CD4017復(fù)位,此時Y1~CD4017基本功能是對CP端輸入脈沖的個數(shù)進行十進制計數(shù),并按照輸入脈沖的個數(shù)順序?qū)⒚}沖分配在Y0
本文研究的小型娛樂仿人機器人控制系統(tǒng)方案中,一個CD4017輸出7路脈沖,分別發(fā)送給7個舵機。
3 實驗
控制系統(tǒng)硬件實物連接圖如圖4。
機器人步行實驗完成5步的向前行和5步的后退的行走過程。步行實驗過程如圖5。
4 結(jié)論
根據(jù)小型仿人機器人的機構(gòu)特點和性能要求,構(gòu)建了以ARM9為主控制器的小型仿人機器人控制系統(tǒng)。設(shè)計開發(fā)了C8051USB單片機和CD4017外部計數(shù)器組成關(guān)節(jié)控制器,該關(guān)節(jié)控制器能夠?qū)崿F(xiàn)多舵機的協(xié)調(diào)控制任務(wù)。實踐證明,采用該結(jié)構(gòu)之后,整個機器人系統(tǒng)的模塊化程度更高,系統(tǒng)的裝配和調(diào)試更加方便。控制系統(tǒng)實現(xiàn)了小型化、低功耗,而且機器人行走穩(wěn)定性。
本文作者的創(chuàng)新點
根據(jù)小型仿人機器人的機構(gòu)特點和性能要求,構(gòu)建了以ARM9為主控制器的小型仿人機器人控制系統(tǒng)。設(shè)計開發(fā)了C8051USB單片機和CD4017外部計數(shù)器組成關(guān)節(jié)控制器,該關(guān)節(jié)控制器能夠?qū)崿F(xiàn)多舵機的協(xié)調(diào)控制任務(wù)。實踐證明,采用該結(jié)構(gòu)之后,整個機器人系統(tǒng)的模塊化程度更高,系統(tǒng)的裝配和調(diào)試更加方便。控制系統(tǒng)實現(xiàn)了小型化、低功耗,而且機器人行走穩(wěn)定性。