
1 引言
運動控制系統(tǒng)的上位控制方案一般有單片機系統(tǒng)、專業(yè)運動控制PLC、專用控制系統(tǒng)和“PC+運動控制卡”。采用單片機系統(tǒng)實現(xiàn)運動控制,成本較低,但開發(fā)難度較大,周期長。這種方案一般適用于產(chǎn)品批量較大、控制系統(tǒng)功能簡單、有單片機系統(tǒng)開發(fā)經(jīng)驗的用戶。許多品牌的PLC都可選配定位控制模塊,有些PLC的CPU單元本身就具有運動控制功能,如松下公司的FP0。這種方案一般適用于運動過程比較簡單、運動軌跡固定的設(shè)備,如送料器、自動焊機等。專用控制系統(tǒng)一般是針對專用設(shè)備或?qū)S眯袠I(yè),比如西門子公司的車床數(shù)控系統(tǒng)和銑床數(shù)控系統(tǒng)等。“PC+運動控制卡”的方案隨著PC的普及用得越來越多,將是運動控制系統(tǒng)的主要發(fā)展趨勢。這種方案可充分利用計算機資源,用于運動過程、機械軌跡都比較復(fù)雜,而且柔性比較強的機器設(shè)備,比如目前很熱門的開放式數(shù)控系統(tǒng)大多采用這種方案。
本文介紹的控制系統(tǒng)采用的就是“PC+運動控制卡”方案,這是本文的主要內(nèi)容。
2 系統(tǒng)組成及硬件介紹
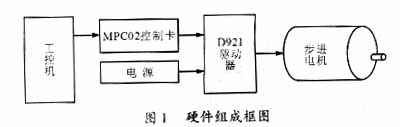
圖1示出本系統(tǒng)的硬件組成框圖。其中采用德國百格拉三相混合式步進電機(VRDM3910/LHA)及其配套驅(qū)動器(D921)。控制卡是成都步進機電有限公司生產(chǎn)的MPC02型運動控制卡。
2.1 驅(qū)動器面板及其功能設(shè)置
圖2是D921型驅(qū)動器的面板配置及功能。

功能選擇:STEP1、STEP2 設(shè)置電機每轉(zhuǎn)步數(shù);
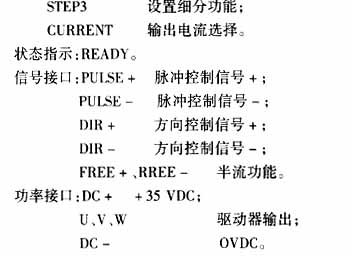
所有輸入信號均為光耦輸入。
2.2 運動控制卡的結(jié)構(gòu)
MPC02型運動控制卡的結(jié)構(gòu)如圖3所示。
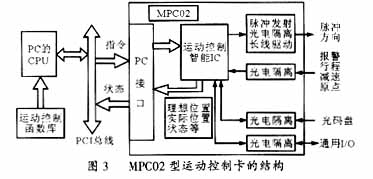
該卡插在PC的PCI擴展槽內(nèi)使用;MPC02卡完成運動控制的所有細節(jié),包括脈沖和方向信號的輸出、自動升降速的處理、原點和限位信號的檢測等。它采用先進的專用控制集成電路,具有梯形及S形升降速度曲線。使用68芯SISC接口,外接線可采用屏蔽線纜,以提高控制卡的抗干擾能力。其信號接口定義如下:
脈沖量信號:脈沖/方向(編號17~28);編碼器反饋(35~52);光隔電源(29、30)。
開關(guān)量信號:限位(55、56、60、61、65、66);減速(53、54、58、59、63、64);原點(57、62、67);伺服使能(9、11、13);偏差清零(10、12、14);外部報警(68);通用輸入(31~34);通用輸出(1~8);光隔電源(15、16)。
3 運動控制系統(tǒng)的軟件
3.1 控制卡的軟件
在函數(shù)庫中使用的單位和函數(shù)返回值通常約定如下。
3.1.1 單位
1)位移或距離的單位為P(Pulse),即脈沖數(shù);
2)速度的單位是P/S(Pulse/sec),即脈沖/秒;
3)加速度和減速度的單位是P/s2(Pulse/s2),即脈沖/秒2。
3.1.2 函數(shù)返回值
運動庫中的大多數(shù)函數(shù)是整型函數(shù),它們的返回意義如下:
0 函數(shù)執(zhí)行正確;-1 函數(shù)執(zhí)行錯誤。
在函數(shù)庫中使用的函數(shù)有如下幾種:控制卡和軸設(shè)置函數(shù)、獨立運動和插補運動函數(shù)、制動函數(shù)、位置和狀態(tài)的設(shè)置及查詢函數(shù)、I/O口操作函數(shù)、錯誤代碼函數(shù)和一些其他函數(shù)。這些函數(shù)實現(xiàn)的運動有如下六種基本類型,如圖4所示。
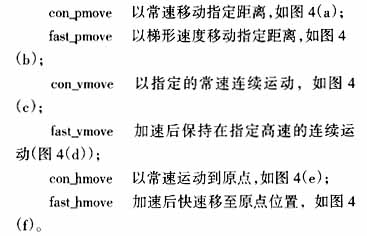
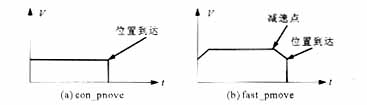
把帶有升/降速控制的運動函數(shù)稱為快速(fast)運動函數(shù),比如fast_pmove、fast_vmove和fast_hmove,把常速運動函數(shù)稱為常速(con)運動函數(shù),如con_pmove、con_vmove和con_hmove。
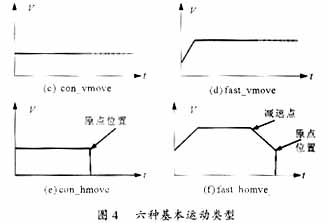
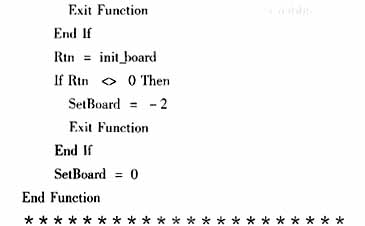
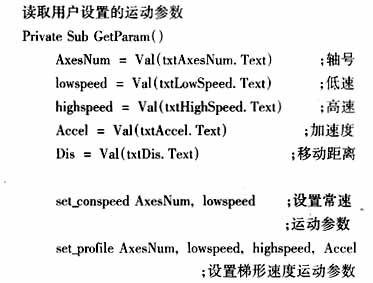
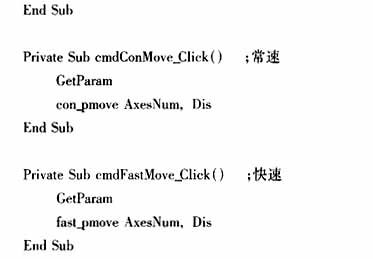
3.2 軟件程序:
運動參數(shù)設(shè)定包括軸號、初速度、最高速度、加速度和移動距離等;運動控制程序包括急停、緩?fù)!⑶辶恪⒊K俸涂焖俚龋豢刂菩Ч@示包括位置和速度等。程序如下:

4 結(jié)束語
以專用運動控制電路為主控的運動控制卡的運動控制功能由硬件電路實現(xiàn),集成度高,可靠性比較好。它只需從微機接收控制命令,然后自己完成與運動有關(guān)的控制,幾乎不占用微機的CPU時間,使用非常方便,不僅可以大大縮短研制和開發(fā)周期,而且還能實現(xiàn)更完善的運動控制系統(tǒng),能夠滿足對步進電機的控制要求。