
定位系統(tǒng)是指在有限的區(qū)域內,,如企業(yè)內部,、校園,、港口、倉庫等,,對財產和人員進行定位和跟蹤,。隨著數據業(yè)務和多媒體業(yè)務的快速增加,人們對定位與導航的需求日益增大,已成為一個新興產業(yè)并成為21世紀最熱門的研究領域之一,。目前,,常用的定位技術包括紅外線、超聲波,、GPS,、Wi-Pi等,但這些技術存在定位范圍小,、抗干擾能力差,、定位精度低等缺陷。本文針對這些不足,,設計并實現(xiàn)了有源REID定位系統(tǒng),,該系統(tǒng)很好駟彌補了這些缺陷,適用于更多的場合,。
1,、定位技術分析
紅外線定位技術只適合于短距離傳播,且容易被熒光燈或者房間內的燈光干擾,,所以該定位技術在定位范圍和定位精確上有很大的局限性,。
超聲波傳播定位技術雖然距離較遠,但是受多徑效應和非視距傳播影響大,,因此該定位技術對環(huán)境要求苛刻,,且不適用于室內環(huán)境定位。
GPS定位技術是目前應用最為廣泛的室外定位技術,,它是⒛世紀70年代初美國用于軍事目的開發(fā)的衛(wèi)星導航定位系統(tǒng),,主要利用幾顆衛(wèi)星的測量數據計算移動用戶位置,覆蓋范圍大,,但是定位信號到達地面時較弱,,不能穿透建筑物,因此該定位技術只適用于室外不適合室內定位,。
Wi-Pi定位技術應用于小范圍的室內或室外定位,,成本較低。但無論是用于室內還是室外定位,,Wi - Fi收發(fā)器都只能覆蓋半徑在90 m以內的區(qū)域,,而且很容易受到其他信號的干擾,從而影響其精度,,定位器的能耗也較高,。
在分析了現(xiàn)有技術不足之后,在此基礎上提出了以RFID技術為核心的定位技術,。REID技術同現(xiàn)有定位技術相比,,不但具有成本上的優(yōu)勢,,而且 REID定位技術對環(huán)境的要求和受到環(huán)境的影響都很小,且定位精度較高,,傳輸范圍大,,同時還能從定位目標中讀取有關該對象的大量信息。
2,、系統(tǒng)構成
本文設計的有源REID定位系統(tǒng)由閱讀器,、標簽、通信網絡和后臺服務器四個部分構成,,如圖1所示。
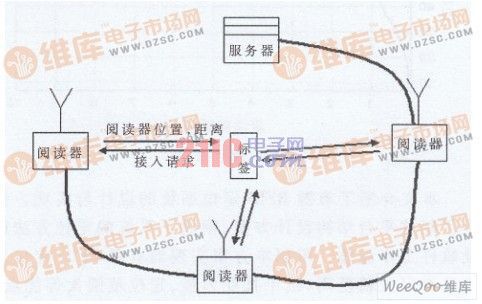
圖1系統(tǒng)構成
各個閱讀器內部存儲了自身的位置信息,,并能通過無線射頻的方式發(fā)送給進人該區(qū)域的標簽,。標簽與閱讀器之間通過射頻通信可以測量出無線電傳輸的偽距,并據此計算出自身位置信息,,然后上報至閱讀器,。通信網絡則可以將閱讀器收到的信息傳輸至后臺服務器,同時后臺服務器還可以通過該網絡控制各個閱讀器,。
系統(tǒng)安裝完成后,,標簽能夠通過無線射頻方式完成自身位置的確定,并且通過通信網絡上傳到后臺服務器上,。后臺服務器收集標簽信息,,并提供標簽位置的網絡服務。
3,、硬件結構
本系統(tǒng)的標簽和閱讀器具有相同的硬件結構,,系統(tǒng)設計分為以下部分:主控制器、無線射頻收發(fā)及測距模塊,、天線,、供電系統(tǒng)。系統(tǒng)原理框圖如圖2所示,。
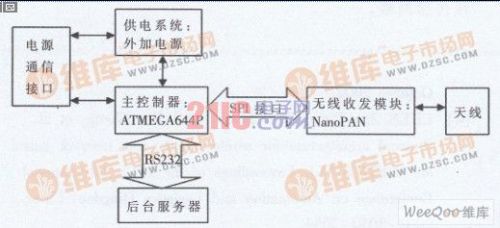
圖2系統(tǒng)原理圖
為適應高速數據處理和網絡通信的需要,,系統(tǒng)以Atmel公司的Atmega64為主控芯片。ATmega64單片機采用Harbard結構,,具有單周期的RISC指令系統(tǒng),,內部具有硬件乘法電路,數據處理速度快,;I/0端口可直接驅動較大電流負載,;具有讀寫及地址鎖存允許控制引腳,便于擴展和使用外部接口和外部存儲空間,;支持在線編程(ISP)及在線應用編程(IAP),,方便現(xiàn)場修改和調試程序,;具有支持主/從機模式的SPI串行通信接口,可以方便連接主/從機模式的串行通信單元,。為了滿足通信和數據高速處理的需要,,本系統(tǒng)采用16 MHz晶振。
無線射頻收發(fā)及測距模塊采用Nanotron公司的NanoPAN模塊,。該模塊采用寬帶線性調頻擴頻(CSS)技術,,并為IEEE 802.15.4a標準所采用。收發(fā)器為一款2.4 GHzISM頻段無線裝置,,可靈活地提供31 25 Kb/s~2 Mb/s范圍的數據傳輸率,,其點對點測距精度在1~2 m之內,可同時提供具有極佳傳輸范圍的可靠數據通信,。通過采用一個MAC控制器,,可降低對微處理器和軟件的要求,輕松地完成高級別系統(tǒng)的設計,。
天線部分采用直接匹配天線的設計,。由于空間限制,無線收發(fā)模塊與天線之間通過導線直接連接,,設計中采用鐵氧體屏蔽和電磁屏蔽,。鐵氧體屏蔽用于減少金屬對天線的影響,電磁屏蔽用于減少由天線線圈本身產生的磁場,。為了在PCB板上做一個屏蔽的天線,,至少要做到4層板,最上層和最下層要有非封閉的屏蔽環(huán)路,。這樣的環(huán)路提供了電磁屏蔽,,改善了電磁兼容性。
由于讀寫器和標簽要向空間發(fā)射無線信號,,需要消耗較多的電能,,所以該系統(tǒng)采用自帶電源,并根據實際功耗選擇適當容量的電池系統(tǒng),,使整體系統(tǒng)的使用不受影響,。
4、軟件結構
標簽與讀寫器具有相同的軟件結構,,如圖3所示,。該系統(tǒng)采用Atmel公司的AVR Studio作為開發(fā)平臺,平臺采用C語言編程,。在軟件系統(tǒng)中,,標簽首先發(fā)送要求接人廣播包的請求,等待讀寫器的響應,,當收到3個以上(包含3個)讀寫器響應后,,標簽開始對收到的讀寫器進行測距,,完成測距后根據讀寫器位置信息計算出自己的位置坐標并通過廣播上傳至讀寫器,開始新一輪測距,。其程序流程圖如圖 4所示,。
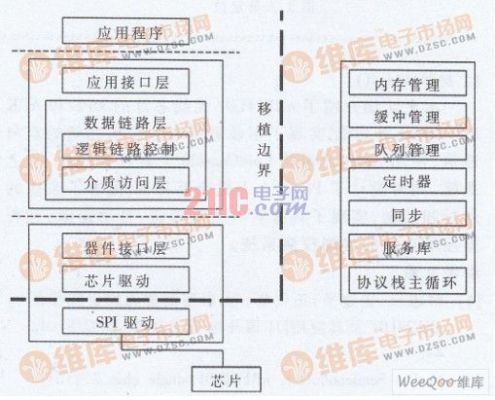
圖3 標簽、讀寫器軟件結構
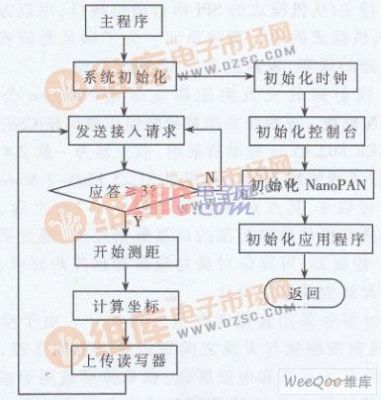
圖4程序流程
5,、測試結果
在系統(tǒng)測試中,,將該定位系統(tǒng)應用于學校實驗樓中的人員定位,通過3個固定的讀寫器對標簽進行實時定位并在PC上進行實時動態(tài)顯示,。如圖5所示,,其中實心點為讀寫器所在位置,空心點為標簽,。最后通過多次實際測試得到圖6的統(tǒng)計曲線圖,,該系統(tǒng)在距離大于4 m的范圍內具有較高的定位精度。

圖5 人員定位
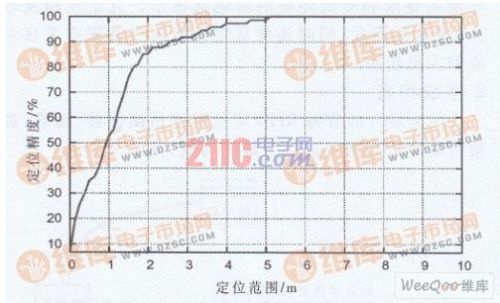
圖6統(tǒng)計曲線
本文介紹了有源REID定位系統(tǒng)的設計與實現(xiàn),。提供了硬件平臺結構設計方案,闡述了系統(tǒng)的定位方法以及軟件工作流程,。根據本方案實現(xiàn)的有源RFID定位系統(tǒng)具有定位精度高,,抗干擾能力強,定位范圍大等優(yōu)點,。