摘 要:本文先介紹了S7-200系列PLC的三種通信方式,及其在網(wǎng)絡(luò)中通信的RS-232和RS-485標(biāo)準(zhǔn)。在實例中,采用西門子公司的S7-200系列PLC為下位機(jī),按照RS-485標(biāo)準(zhǔn)與上位機(jī)通信;通信協(xié)議為以自由口模式創(chuàng)建用戶自定義的協(xié)議,數(shù)據(jù)傳輸格式為16進(jìn)制ASCII編碼,求和校驗;上位機(jī)采用VC編程的可視化界面,在編程過程中采用不可中斷方式和多緩沖區(qū)結(jié)構(gòu),實現(xiàn)了可靠且高速的通信方式。
關(guān)鍵詞:PLC;串行通信;高速通信;VC;自由口模式
0、引言
工業(yè)控制領(lǐng)域中PLC作為一種高效、靈活、可靠的控制器,有著廣泛的應(yīng)用。以PLC控制器為核心,上位PC機(jī)為實時監(jiān)控體的控制系統(tǒng)已成為工業(yè)自動化PLC控制系統(tǒng)的一個發(fā)展方向。實現(xiàn)PLC與PC的通信可以實現(xiàn)向上級提供諸如工藝流程圖、動態(tài)數(shù)據(jù)畫面、報表顯示等多種窗口技術(shù),使PLC控制系統(tǒng)具有良好的人機(jī)界面,通過上位機(jī)對PLC數(shù)據(jù)的讀寫監(jiān)控實現(xiàn)現(xiàn)場數(shù)據(jù)的采集、傳送以及生產(chǎn)過程調(diào)度的自動化和信息化,其應(yīng)用前景十分廣闊。常用的各種PLC網(wǎng)絡(luò)有差異,但表現(xiàn)在 PLC 通信程序、系統(tǒng)聯(lián)結(jié)和系統(tǒng)配置等方面,通信機(jī)理有統(tǒng)一性。目前市場上通信組態(tài)系統(tǒng)結(jié)構(gòu)復(fù)雜,價格昂貴,應(yīng)用繁瑣,不適應(yīng)用戶使用。針對上述問題筆者以西門子公司的S7-200系列的PLC為研究對象,提出了一種用VC實現(xiàn)上位機(jī)與PLC的高速可靠的通信方法。
1、S7-200系列PLC通信方式
西門子S7-200系列性能優(yōu)良,性價比較高,適用范圍很廣,因此本文主要討論西門子7-200系列與計算機(jī)之間的通信。S7-200系列通信方式有三種:
(1) 點對點PPI方式與上位機(jī)通信:用于與西門子公司的PLC編程器或其他該公司人機(jī)接口產(chǎn)品的通信。該種通信方式采用的是MSComm ActivcX控件。PPI是主/從協(xié)議,網(wǎng)絡(luò)上的S7-200均為從站,其他CPU、SIMATIC編程器或TD200為主站。如果在用戶程序中允許PPI主站模式,一些S7-200CPU在RUN模式下可以作主站,它們可以用網(wǎng)絡(luò)讀和網(wǎng)絡(luò)寫指令讀寫其他CPU中的數(shù)據(jù)。PPI沒有限制可以有多少個主站與一個從站通信,但是在網(wǎng)絡(luò)中最多只能有32個從站。PPI通信協(xié)議是不公開的;
(2) Freeport方式與上位機(jī)通信:Freeport方式具有與外圍設(shè)備通信方便、自由,易于微機(jī)開發(fā)等特點,因此使用自由口方式實現(xiàn)與上位機(jī)通信的控制方案較多。但在該通信方式下,上位機(jī)與PLC的最大通信能力為128bit/s,這無法滿足高速通信的需要;
(3) Profibus-DP方式與上位機(jī)通信:Profibus協(xié)議用于幾分布式I/O設(shè)備的高速通信。S7-200CPU需通過EM277。Profibus-DP模塊接入Profibus網(wǎng)絡(luò),網(wǎng)絡(luò)通常有一個主站和幾個I/O從站。這種方式使得PLC可以通過Profibus的DP通信接口接入Profibus現(xiàn)場總線網(wǎng)絡(luò),從而擴(kuò)大PLC的使用范圍。PPI協(xié)議和Profibus協(xié)議的結(jié)構(gòu)模型都是基于開放系統(tǒng)互連參考模型的7層通信結(jié)構(gòu)。
2、PLC網(wǎng)絡(luò)通信標(biāo)準(zhǔn)簡介
(1) RS-232C標(biāo)準(zhǔn)
通信的連接接口與連接電纜的相互兼容是通信得以保證的前提。它的實現(xiàn)方法發(fā)展迅速,型式較多。其中RS-232C就是實際應(yīng)用較多的標(biāo)準(zhǔn)之一,它是計算機(jī)或終端與調(diào)制解調(diào)器之間的標(biāo)準(zhǔn)接口。RS-232C功能規(guī)范定義了電路之間的連接,以及它的含義。RS-232C的規(guī)程規(guī)范定義的是協(xié)議,即事件出現(xiàn)的正確順序。RS-232C的缺點是數(shù)據(jù)傳輸率低傳輸距離短。
(2) RS-485標(biāo)準(zhǔn)
在許多工業(yè)環(huán)境中,要求用最少的信號連線來完成通信任務(wù)。日前廣泛應(yīng)用的是RS-485串行接口總線,RS-485支持半雙工通信,分時使用一對雙絞信號線進(jìn)行發(fā)送或接收。RS-485用于多站互聯(lián)時實現(xiàn)簡單,節(jié)省材料,可以滿足高速遠(yuǎn)距離傳送,構(gòu)成分布式網(wǎng)絡(luò)控制系統(tǒng)十分方便。
3、通信網(wǎng)絡(luò)接口的設(shè)計
在本工程中,我們采用的PLC為CPU224型,該可編程控制器的通信端口為RS-485接口,由于PC機(jī)的串行端口為RS-232接口,且遠(yuǎn)離控制現(xiàn)場(PLC位置),因此PC機(jī)的RS-232接口必須通過RS-232/RS-485轉(zhuǎn)換器轉(zhuǎn)換后才能與PLC通信端口連接,這種通信方式可以實現(xiàn)最遠(yuǎn)1.2Krn的遠(yuǎn)程通信。
PC機(jī)的標(biāo)準(zhǔn)串口為RS232。S7-200系列CPU226提供2個串口,其中一個端口Portl作為DP口,另一個端口Port0為自由口,自由口為標(biāo)準(zhǔn)RS485串口。西門子公司提供的PC/PPI電纜帶有RS232/RS485電平轉(zhuǎn)換器,因此在不增加任何硬件的情況下,可以很方便地將PLC和PC機(jī)互聯(lián)。
4、通信程序設(shè)計
(1) 上位機(jī)部分程序
單命令把MSComm控件加入到工程中。MSComm控件通信功能的實現(xiàn)實際上是調(diào)用了API函數(shù)。而API函數(shù)是由Comm.drv解釋并傳遞給設(shè)備驅(qū)動程序進(jìn)行的。即MSComm控件的屬性提供了通信接口的參數(shù)設(shè)置,能實現(xiàn)串行通信。MSComm控件有關(guān)屬性如下:
CommPort:設(shè)置并返回通信端口號。Window系統(tǒng)將會利用該端口與外界通信;
Setings:設(shè)置并返回初始化參數(shù)。其組成格式為“BBBB。P。D。S”。BBBB為數(shù)據(jù)速率。P為奇偶校驗。D為數(shù)據(jù)比特。S為停止位;
PortOpen:設(shè)置并返回通信端口的狀態(tài)。也可以打開和關(guān)閉端口;
Ouptut:向傳輸緩沖區(qū)寫1B的數(shù)據(jù);
Input:將傳送到輸入緩沖區(qū)的字符讀到程序里;
RThreshold:設(shè)置在產(chǎn)生OnComm之前要接受的字符數(shù);
InputLen:設(shè)置并返回Input屬性從接收緩沖區(qū)讀取的字符數(shù);
InBbuffersize:設(shè)置或返回輸入緩沖區(qū)的大小;
InBufferCount:返回輸入緩沖區(qū)內(nèi)等待讀區(qū)的字節(jié)個數(shù)。可通過設(shè)置該屬性值為0來清除接收緩沖區(qū);
InputMode:設(shè)置或返回傳輸數(shù)據(jù)的類型;
CommEvent:傳回OnComm事件發(fā)生時的數(shù)值碼;
軟件通信流程圖如圖1 。
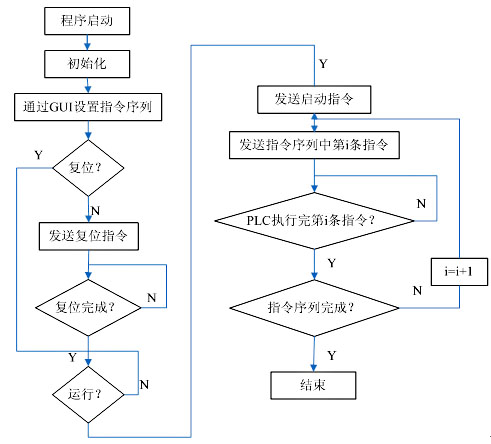
圖1 :通信流程圖
在實際應(yīng)用中,從站被動的接收上位機(jī)發(fā)出的指令后做出響應(yīng),然后將信息傳回上位機(jī),由于上位機(jī)在整個通信的過程中不能被中斷,因此上位機(jī)在接收與發(fā)送數(shù)據(jù)過程中采用了不可中斷的方法。
(2) 從站PLC程序
S72200系列PLC選擇了自由口通信方式后,在程序中就可以使用接收中斷、發(fā)送中斷、接收指令(RCV)、發(fā)送指令(XMT)來控制通信操作,當(dāng)處于自由口模式時通信協(xié)議完全由用戶程序指令控制。SMB30被用于選擇比特率和校驗類型,各個位的配置為:

圖2:SMB30的位配置
pp,校驗選擇:00為不校驗,01為偶校驗,10為不校驗,11為奇校驗;
d,每個字符的數(shù)據(jù)位數(shù):0,每個數(shù)字符8位;1,每個數(shù)字符7位。
bbb,自由口比特率,kbit/s:000為3814,001為1912,010為916,011為418,100為214,101為112,110為11512,111為5716。
mm,協(xié)議選擇:00,PPI/從站模式;01,自由口模式;10,PPI/從站模式;11,保留。
接收指令(RCV)啟動或終止接收信息功能,必須為接收操作指定開始和結(jié)束條件。發(fā)送指令(XMT)在自由口模式下依靠通訊口發(fā)送數(shù)據(jù)。
PLC程序分為主程序和中斷程序。主程序完成初始化通信口、開中斷、判斷、發(fā)送數(shù)據(jù)等功能,中斷程序完成接收和發(fā)送數(shù)據(jù)的功能。
5、高速通信設(shè)計及檢驗
(1) 高速接口設(shè)計
PC機(jī)采用400MHz的CPU以及256M的RAM,應(yīng)用VC++6.0開發(fā)軟件和Sicmcns SIMATIC Microcomputing軟件進(jìn)行開發(fā)設(shè)計。使用PC/PPI電纜可實現(xiàn)計算機(jī)的RS232接口與PLC通信。但該方式下只能使用PPI協(xié)議或自山通信。要使用PROFIBUS協(xié)議通信。上位機(jī)應(yīng)有PROFIBUS DP模塊。同時S7- 200 PLC應(yīng)連接通信模塊。這里上位機(jī)使用的是CP5611 PROFIBUS DP模塊。安裝的是SicmcnsSIMATIC Micro computing軟件;下位機(jī)使用的是EM277 PROFIBUS DP模塊和S7-200 224PLC組建的通信網(wǎng)絡(luò)。
(2) 速度仿真與檢測
Siemens SIMATIC Microcomputing軟件使用ActiveX技術(shù)提供對數(shù)據(jù)的訪問控制。 Microcomputing軟件由2部分組成:第一部分,一系列的SIMATIC ActiveX控件,用于對PLC的數(shù)據(jù)操作,主要包括數(shù)據(jù)控件!按鈕控件!編輯控件!標(biāo)簽控件和滑塊控件;另一部分,一個容器,用于創(chuàng)建使用ActiveX控件的處理界面[7-8]。
上位機(jī)用Micro computing configuration設(shè)定通信協(xié)議和波特率。 Siemens Micro computing提供PPI, MPI, PROFIBUS-I辦議支持Data Control與PLC通信。PPI協(xié)議支持的最高通信速率為187.5KbpsMPI和PROFIBUS都支持9.6kbps-12Mbps的速率通信。PROFIBUS包含PROFIBUS-DP協(xié)議、PROFIBUS-Standard協(xié)議、PROFIBUS-User-defined協(xié)議和PROFIBUS-Universal協(xié)議(該協(xié)議只支持9.6kbps-1.5Mbps的通信)。用Micro computing configuration設(shè)定相應(yīng)的應(yīng)用程序接口點和協(xié)議。檢測實驗中表示應(yīng)用程序接口點為CP5611協(xié)議為PROFIBUS基木實現(xiàn)流程圖如4所示。
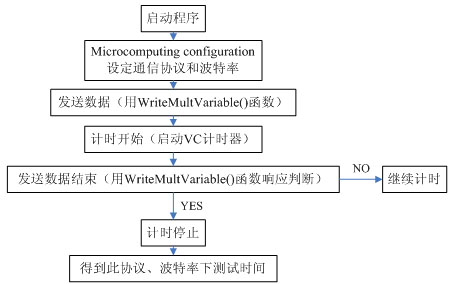
圖3:檢測實驗流程圖
對PLC數(shù)據(jù)的讀寫。Data Control提供了4個函數(shù):Write Variable(對單存儲單元寫),Write Multi Variable(對多存儲單元寫),Read Variable(對單存儲單元讀),Read Multi Variable(對多存儲單元讀)。
表1是在WIN2000系統(tǒng)下,針對PROFIBUS的不同協(xié)議,Data Control使用自動連接,自動超時設(shè)為100ms,用Write Multi Variable函數(shù)對一個S7- 200PLC的V存儲區(qū)10個存儲單元進(jìn)行20個字節(jié)寫1000次的測試數(shù)據(jù)見表1。從表1數(shù)據(jù)可知,PROFIBUS-DP協(xié)議,PROFI-BUS-Standard協(xié)議、PROFIBUS-User-defined協(xié)議和PROFIBUS-Universal協(xié)議在1.5 M的波特率下,其寫操作時間最短的是PROFIBUS-Universal協(xié)議,時間為31.61ms。
表1:不同協(xié)議下對PLC寫數(shù)據(jù)時間

6、結(jié)束語
本系統(tǒng)通過現(xiàn)場調(diào)試實驗,功能達(dá)到設(shè)計要求。試驗結(jié)果表明,當(dāng)數(shù)據(jù)傳輸速率為916kbit/s時誤碼率< ,能夠?qū)崿F(xiàn)現(xiàn)場網(wǎng)絡(luò)的在線監(jiān)控、調(diào)試及數(shù)據(jù)修改。由于程序中采用了以16進(jìn)制ASCII碼描述數(shù)據(jù)傳輸格式,因此一條指令中的數(shù)據(jù)字節(jié)和控制字節(jié)不可能發(fā)生混淆,通信更加可靠。同時采用了PROFIBUS-Universal協(xié)議,實現(xiàn)了上位機(jī)和PLC之間的高速通信,并用實驗證實了該協(xié)議的優(yōu)越性。對于其它品牌的PLC,盡管通信規(guī)范及初始化有所不同,可以參照本系統(tǒng)方法進(jìn)行編程,稍做修改即可應(yīng)用。本系統(tǒng)的成功研制將對工業(yè)控制系統(tǒng)的自動化、智能化、網(wǎng)絡(luò)化的發(fā)展提供有益的借鑒。
參考文獻(xiàn)
[1] 蔚俊蘭,丁振榮.組態(tài)王6.5與單片機(jī)的通信方法[J].工業(yè)控制計算機(jī),2004,17(10),58-59.
[2] 張晞,王德銀,張晨.MSP430系列單片機(jī)使用C語言程序設(shè)計[M].北京,人民郵電出版社,2005.
[3] ADAM-5000 Series RS-485 Based Data Acquisition and Control System User’s Manual.
[4] 呂鵬剛,何承波,劉開培等.基于亞當(dāng)模塊的火電廠自動加藥系統(tǒng)[J] ,微計算機(jī)信息2001,17(11):19-20.
[5] 鄭晟,建平,張學(xué);現(xiàn)代可編程序控制其原理與應(yīng)用[M],北京;科學(xué)出版社,2003
[6] 廖常初;PLC編程及應(yīng)用[M],北京:機(jī)械工業(yè)出版社,2002
[7] SIEMENS Company. SIMATIC Micro computing User Manual. [S.1]:SIEMENS Company, 2000 62-88.
[8] SIEMENS Company. SIMATIC S7-200 Programmable Controller System Manual[M].[S.1]: SIEMENS Company, 2000 568-600.
