風(fēng)力發(fā)電場具有機組布置范圍廣闊,設(shè)備運行的自然環(huán)境惡劣等特點,WPCS風(fēng)電控制系統(tǒng)專為大型風(fēng)力發(fā)電機組而設(shè)計,產(chǎn)品集成了當(dāng)代最先進的電力電子、微電子、網(wǎng)絡(luò)和軟件技術(shù),系統(tǒng)的網(wǎng)絡(luò)結(jié)構(gòu)如下:
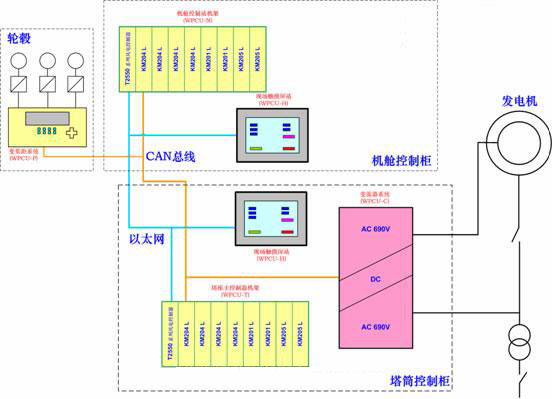
風(fēng)電控制系統(tǒng)網(wǎng)絡(luò)結(jié)構(gòu)圖
WPCS風(fēng)電控制系統(tǒng)包括現(xiàn)場風(fēng)力發(fā)電機組控制單元、高速環(huán)型冗余光纖以太網(wǎng)、遠程上位機操作員站等部分。現(xiàn)場風(fēng)力發(fā)電機組控制單元是每臺風(fēng)機控制的核心,實現(xiàn)機組的參數(shù)監(jiān)視、自動發(fā)電控制和設(shè)備保護等功能;每臺風(fēng)力發(fā)電機組配有就地HMI人機接口以實現(xiàn)就地操作、調(diào)試和維護機組;高速環(huán)型冗余光纖以太網(wǎng)是系統(tǒng)的數(shù)據(jù)高速公路,將機組的實時數(shù)據(jù)送至上位機界面;上位機操作員站是風(fēng)電廠的運行監(jiān)視核心,并具備完善的機組狀態(tài)監(jiān)視、參數(shù)報警,實時/歷史數(shù)據(jù)的記錄顯示等功能,操作員在控制室內(nèi)實現(xiàn)對風(fēng)場所有機組的運行監(jiān)視及操作。
風(fēng)力發(fā)電機組控制單元(WPCU)是每臺風(fēng)機的控制核心,分散布置在機組的塔筒和機艙內(nèi)。由于風(fēng)電機組現(xiàn)場運行環(huán)境惡劣,對控制系統(tǒng)的可靠性要求非常高,而WPCS風(fēng)電控制系統(tǒng)是專門針對大型風(fēng)電場的運行需求而設(shè)計,具有極高的環(huán)境適應(yīng)性和抗電磁干擾等特點,其系統(tǒng)結(jié)構(gòu)如下:
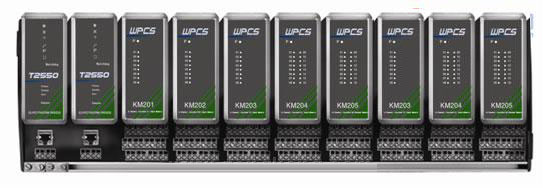
WPCU-T2550系列
WPCS風(fēng)電控制系統(tǒng)的現(xiàn)場控制站包括:塔座主控制器機架、機艙控制站機架、變槳距系統(tǒng)、變流器系統(tǒng)、現(xiàn)場觸摸屏站、以太網(wǎng)交換機、現(xiàn)場總線通訊網(wǎng)絡(luò)、UPS電源、緊急停機后備系統(tǒng)等。
1、塔座控制站(WPCU-T)
塔座控制站即主控制器機架是風(fēng)電機組設(shè)備控制的核心,主要包括控制器、I/O模件等。
控制器硬件采用32位POWERPC處理器,系統(tǒng)軟件采用強實時性的Vxworks操作系統(tǒng),運行機組的各類復(fù)雜主控邏輯通過現(xiàn)場總線與機艙控制器機架、變槳距系統(tǒng)、變流器系統(tǒng)進行實時通訊,以使機組運行在最佳狀態(tài)。
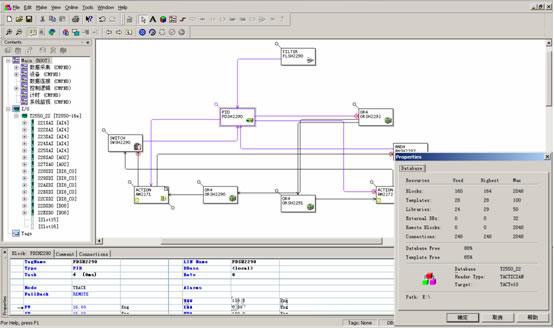
控制器的組態(tài)采用功能豐富、界面友好的KTOOLS組態(tài)軟件,采用符合IEC61131-3標(biāo)準(zhǔn)的組態(tài)方式,包括:功能圖(FBD)、指令表(LD)、順序功能塊(SFC)、梯形圖、結(jié)構(gòu)化文本等組態(tài)方式。

2、機艙控制站(WPCU-N)
機艙控制站采集機組傳感器測量的溫度、壓力、轉(zhuǎn)速以及環(huán)境參數(shù)等信號,通過現(xiàn)場總線和機組主控制站通訊,主控制器通過機艙控制機架以實現(xiàn)機組的偏航、解纜等功能,此外還對機艙內(nèi)各類輔助電機、油泵、風(fēng)扇進行控制以使機組工作在最佳狀態(tài)。
3、變槳距系統(tǒng)(WPCU-P)
大型MW級以上風(fēng)電機組通常采用液壓變槳系統(tǒng)或電動變槳系統(tǒng)。變槳系統(tǒng)由前端控制器對3個風(fēng)機葉片的槳距驅(qū)動裝置進行控制,其是主控制器的執(zhí)行單元,采用CANOPEN與主控制器進行通訊,以調(diào)節(jié)3個葉片的槳距工作在最佳狀態(tài)。變槳系統(tǒng)有后備電源系統(tǒng)和安全鏈保護,保證在危急工況下緊急停機。
4、變流器系統(tǒng)(WPCU-C)
由于電力電子元件的性能不斷提高,價格不斷下降,大型風(fēng)力發(fā)電機組目前普遍采用大功率的變流器以實現(xiàn)發(fā)電能源的變換,變流器系統(tǒng)通過現(xiàn)場總線與主控制器進行通訊,實現(xiàn)機組的轉(zhuǎn)速、有功功率和無功功率的調(diào)節(jié)。
5、現(xiàn)場觸摸屏站(WPCU-H)
現(xiàn)場觸摸屏站是機組監(jiān)控的就地操作站,實現(xiàn)風(fēng)力機組的就地參數(shù)設(shè)置、設(shè)備調(diào)試、維護等功能,是機組控制系統(tǒng)的現(xiàn)場上位機操作員站。
6、以太網(wǎng)交換機(HUB)
系統(tǒng)采用工業(yè)級以太網(wǎng)交換機,以實現(xiàn)單臺機組的控制器、現(xiàn)場觸摸屏和遠端控制中心網(wǎng)絡(luò)的連接。現(xiàn)場機柜內(nèi)采用普通雙絞線連接,和遠程控制室上位機采用光纜連接。
7、現(xiàn)場通訊網(wǎng)絡(luò)
主控制器具有CANOPEN、PROFIBUS、MODBUS、以太網(wǎng)等多種類型的現(xiàn)場總線接口,可根據(jù)項目的實際需求進行配置。
8、UPS電源、后備危急安全鏈系統(tǒng)
UPS電源用于保證系統(tǒng)在外部電源斷電的情況下,機組控制系統(tǒng)、危急保護系統(tǒng)以及相關(guān)執(zhí)行單元的供電。
后備危急安全鏈系統(tǒng)獨立于計算機系統(tǒng)的硬件保護措施,即使控制系統(tǒng)發(fā)生異常,也不會影響安全鏈的正常動作。安全鏈?zhǔn)菍⒖赡軐︼L(fēng)力發(fā)電機造成致命傷害的超常故障串聯(lián)成一個回路,當(dāng)安全鏈動作后將引起緊急停機,機組脫網(wǎng),從而最大限度地保證機組的安全。
所有風(fēng)電機組通過光纖以太網(wǎng)連接至主控室的上位機操作員站,實現(xiàn)整個風(fēng)場的遠程監(jiān)控,上位機監(jiān)控軟件具有如下功能:
① 系統(tǒng)具有友好的控制界面。在編制監(jiān)控軟件時,充分考慮到風(fēng)電場運行管理的要求,使用漢語菜單,使操作簡單,盡可能為風(fēng)電場的管理提供方便。
② 系統(tǒng)顯示各臺機組的運行數(shù)據(jù),如每臺機組的瞬時發(fā)電功率、累計發(fā)電量、發(fā)電小時數(shù)、風(fēng)輪及電機的轉(zhuǎn)速和風(fēng)速、風(fēng)向等,將下位機的這些數(shù)據(jù)調(diào)入上位機,在顯示器上顯示出來,必要時還可以用曲線或圖表的形式直觀地顯示出來。
③ 系統(tǒng)顯示各風(fēng)電機組的運行狀態(tài),如開機、停車、調(diào)向、手/自動控制以及大/小發(fā)電機工作等情況,通過各風(fēng)電機組的狀態(tài)了解整個風(fēng)電場的運行情況。
④ 系統(tǒng)能夠及時顯示各機組運行過程中發(fā)生的故障。在顯示故障時,能顯示出故障的類型及發(fā)生時間,以便運行人員及時處理及消除故障,保證風(fēng)電機組的安全和持續(xù)運行。
⑤ 系統(tǒng)能夠?qū)︼L(fēng)電機組實現(xiàn)集中控制。值班員在集中控制室內(nèi),只需對標(biāo)明某種功能的相應(yīng)鍵進行操作,就能對下位機進行改變設(shè)置狀態(tài)和對其實施控制。如開機、停機和左右調(diào)向等。但這類操作有一定的權(quán)限,以保證整個風(fēng)電場的運行安全。
⑥ 系統(tǒng)管理。監(jiān)控軟件具有運行數(shù)據(jù)的定時打印和人工即時打印以及故障自動記錄的功能,以便隨時查看風(fēng)電場運行狀況的歷史記錄情況。
WPCS風(fēng)電控制系統(tǒng)具有以下基本功能:
(1)數(shù)據(jù)采集(DAS)功能:包括采集電網(wǎng)、氣象、機組參數(shù),實現(xiàn)控制、報警、記錄、曲線功能等;
(2)機組控制功能:包括自動啟動機組、并網(wǎng)控制、轉(zhuǎn)速控制、功率控制、無功補償控制、自動對風(fēng)控制、解纜控制、自動脫網(wǎng)、安全停機控制等;
(3)遠程監(jiān)控系統(tǒng)功能:包括機組參數(shù)、相關(guān)設(shè)備狀態(tài)的監(jiān)控,歷史和實時曲線功能,機組運行狀況的累計監(jiān)測等。
1、數(shù)據(jù)采集(DAS)功能
機組運行過程中進行監(jiān)測的相關(guān)參數(shù)包括:
(1)電網(wǎng)參數(shù),包括電網(wǎng)三相電壓、三相電流、電網(wǎng)頻率、功率因數(shù)等。電壓故障檢測:電網(wǎng)電壓閃變、過電壓、低電壓、電壓跌落、相序故障、三相不對稱等。
(2)氣象參數(shù),包括風(fēng)速、風(fēng)向、環(huán)境溫度等。
(3)機組狀態(tài)參數(shù)檢測,包括:風(fēng)輪轉(zhuǎn)速、發(fā)電機轉(zhuǎn)速、發(fā)電機線圈溫度、發(fā)電機前后軸承溫度、齒輪箱油溫度、齒輪箱前后軸承溫度、液壓系統(tǒng)油溫、油壓、油位、機艙振動、電纜紐轉(zhuǎn)、機艙溫度等。
風(fēng)電場遠程監(jiān)控中心的上位機和塔座觸摸屏站均可實現(xiàn)機組的狀態(tài)監(jiān)視,實現(xiàn)相關(guān)參數(shù)的顯示、記錄、曲線、報警等功能。
2、機組啟停、發(fā)電控制
(1)主控系統(tǒng)檢測電網(wǎng)參數(shù)、氣象參數(shù)、機組運行參數(shù),當(dāng)條件滿足時,啟動偏航系統(tǒng)執(zhí)行自動解纜、對風(fēng)控制,釋放機組的剎車盤,調(diào)節(jié)槳距角度,風(fēng)車開始自由轉(zhuǎn)動,進入待機狀態(tài)。
(2)當(dāng)外部氣象系統(tǒng)監(jiān)測的風(fēng)速大于某一定值時,主控系統(tǒng)啟動變流器系統(tǒng)開始進行轉(zhuǎn)子勵磁,待發(fā)電機定子輸出電能與電網(wǎng)同頻、同相、同幅時,合閘出口斷路器實現(xiàn)并網(wǎng)發(fā)電。
(3)風(fēng)力機組功率、轉(zhuǎn)速調(diào)節(jié)
根據(jù)風(fēng)力機特性,當(dāng)機組處于最佳葉尖速比λ運行時,風(fēng)機機組將捕獲得最大的能量,雖理論上機組轉(zhuǎn)速可在任意轉(zhuǎn)速下運行,但受實際機組轉(zhuǎn)速限制、系統(tǒng)功率限制,不得不將該階段分為以下幾個運行區(qū)域:即變速運行區(qū)域、恒速運行區(qū)域和恒功率運行區(qū)。額定功率內(nèi)的運行狀態(tài)包括:變速運行區(qū)(最佳的λ)和恒速運行區(qū)。
當(dāng)風(fēng)機并網(wǎng)后,轉(zhuǎn)速小于極限轉(zhuǎn)速、功率低于額定功率時,根據(jù)當(dāng)前實際風(fēng)速,調(diào)節(jié)風(fēng)輪的轉(zhuǎn)速,使機組工作在捕獲最大風(fēng)能的狀態(tài)。
由于風(fēng)速儀測量點的風(fēng)速與作用于槳葉的風(fēng)速存在一定誤差,所以轉(zhuǎn)距觀測器來預(yù)測風(fēng)力機組的機械傳動轉(zhuǎn)距,在通過發(fā)電機轉(zhuǎn)速和轉(zhuǎn)距的對應(yīng)關(guān)系推出轉(zhuǎn)速。
ω為發(fā)電機轉(zhuǎn)速期望值。
Tm為轉(zhuǎn)距的觀測值。
Kopt為最佳轉(zhuǎn)速時的比例常數(shù)。
當(dāng)風(fēng)速增加使發(fā)電機轉(zhuǎn)速達上限后,主控制器需維持轉(zhuǎn)速恒定,風(fēng)力機組發(fā)出的電功率,隨風(fēng)速的增加而增加,此時機組偏離了風(fēng)力機的最佳λ曲線運行。
當(dāng)風(fēng)速繼續(xù)增加,使轉(zhuǎn)速、功率都達到上限后,進入恒功率運行區(qū)運行,此狀態(tài)下主控通過變流器,維持機組的功率恒定,主控制器一方面通過槳距系統(tǒng)的調(diào)節(jié)減少風(fēng)力攻角,減少葉片對風(fēng)能的捕獲;另一方面通過變流器降低發(fā)電機轉(zhuǎn)速節(jié),使風(fēng)力機組偏離最佳λ曲線運行,維持發(fā)電機的輸出功率穩(wěn)定。
3、風(fēng)電控制系統(tǒng)輔助設(shè)備邏輯
(1)發(fā)電機系統(tǒng)
監(jiān)控發(fā)電機運行參數(shù),通過3臺冷卻風(fēng)扇和4臺電加熱器,控制發(fā)電機線圈溫度、軸承溫度、滑環(huán)室溫度在適當(dāng)?shù)姆秶鷥?nèi),相關(guān)邏輯如下:
當(dāng)發(fā)電機溫度升高至某設(shè)定值后,起動冷卻風(fēng)扇,當(dāng)溫度降低到某設(shè)定值時,停止風(fēng)扇運行;當(dāng)發(fā)電機溫度過高或過低并超限后,發(fā)出報警信號,并執(zhí)行安全停機程序。
當(dāng)溫度越低至某設(shè)定值后,起動電加熱器,溫度升高至某設(shè)定值后時,停止加熱器運行;同時電加熱器也用于控制發(fā)電機的溫度端差在合理的范圍內(nèi)。
(2)液壓系統(tǒng)
機組的液壓系統(tǒng)用于偏航系統(tǒng)剎車、機械剎車盤驅(qū)動。機組正常時,需維持額定壓力區(qū)間運行。
液壓泵控制液壓系統(tǒng)壓力,當(dāng)壓力下降至設(shè)定值后,啟動油泵運行,當(dāng)壓力升高至某設(shè)定值后,停泵。
(3)氣象系統(tǒng)
氣象系統(tǒng)為智能氣象測量儀器,通過RS485口和控制器進行通訊,將機艙外的氣象參數(shù)采集至控制系統(tǒng)。
根據(jù)環(huán)境溫度控制氣象測量系統(tǒng)的加熱器以防止結(jié)冰。
閃光障礙燈控制,每個葉片的末端安裝閃光障礙燈,在夜晚點亮。
機艙風(fēng)扇控制機艙內(nèi)環(huán)境溫度。
(4)電動變槳距系統(tǒng)
變槳距系統(tǒng)包括每個葉片上的電機、驅(qū)動器、以及主控制PLC等部件,該PLC通過CAN總線和機組的主控系統(tǒng)通訊,是風(fēng)電控制系統(tǒng)中槳距調(diào)節(jié)控制單元,變槳距系統(tǒng)有后備DO順槳控制接口。槳距系統(tǒng)的主要功能如下:
緊急剎車順槳 系統(tǒng)控制,在緊急情況下,實現(xiàn)風(fēng)機順槳控制。
通過CAN通訊接口和主控制器通訊,接受主控指令,槳距系統(tǒng)調(diào)節(jié)槳葉的節(jié)角距至預(yù)定位置。
槳距系統(tǒng)和主控制器的通訊內(nèi)容包括:
槳葉A位置反饋
槳葉B位置反饋
槳葉C位置反饋
槳葉節(jié)距給定指令
槳距系統(tǒng)綜合故障狀態(tài)
葉片在順槳狀態(tài)
順槳命令
(5)增速齒輪箱系統(tǒng)
齒輪箱系統(tǒng)用于將風(fēng)輪轉(zhuǎn)速增速至雙饋發(fā)電機的正常轉(zhuǎn)速運行范圍內(nèi),需監(jiān)視和控制齒輪油泵、齒輪油冷卻器、加熱器、潤滑油泵等等。
當(dāng)齒輪油壓力低于設(shè)定值時,起動齒輪油泵;當(dāng)壓力高于設(shè)定值時,停止齒輪油泵。當(dāng)壓力越限后,發(fā)出警報,并執(zhí)行停機程序。
齒輪油冷卻器/加熱器控制齒輪油溫度:當(dāng)溫度低于設(shè)定值時,起動加熱器,當(dāng)溫度高于設(shè)定值時停止加熱器;當(dāng)溫度高于某設(shè)定值時,起動齒輪油冷卻器,當(dāng)溫度降低到設(shè)定值時停止齒輪油冷卻器。
潤滑油泵控制,當(dāng)潤滑油壓低于設(shè)定值時,起動潤滑油泵,當(dāng)油壓高于某設(shè)定值時,停止?jié)櫥捅谩?br />
(6)偏航系統(tǒng)控制
根據(jù)當(dāng)前的機艙角度和測量的低頻平均風(fēng)向信號值,以及機組當(dāng)前的運行狀態(tài)、負荷信號,調(diào)節(jié)CW(順時針)和CCW(逆時針)電機,實現(xiàn)自動對風(fēng)、電纜解纜控制。
自動對風(fēng):當(dāng)機組處于運行狀態(tài)或待機狀態(tài)時,根據(jù)機艙角度和測量風(fēng)向的偏差值調(diào)節(jié)CW、CCW電機,實現(xiàn)自動對風(fēng)。(以設(shè)定的偏航轉(zhuǎn)速進行偏航,同時需要對偏航電機的運行狀態(tài)進行檢測)
自動解纜控制:當(dāng)機組處于暫停狀態(tài)時,如機艙向某個方向扭轉(zhuǎn)大于720度時,啟動自動解纜程序,或者機組在運行狀態(tài)時,如果扭轉(zhuǎn)大于1024度時,實現(xiàn)解纜程序。
(7)大功率變流器通訊
主控制器通過CANOPEN通訊總線和變流器通訊,變流器實現(xiàn)并網(wǎng)/脫網(wǎng)控制、發(fā)電機轉(zhuǎn)速調(diào)節(jié)、有功功率控制、無功功率控制:
并網(wǎng)和脫網(wǎng):變流器系統(tǒng)根據(jù)主控的指令,通過對發(fā)電機轉(zhuǎn)子勵磁,將發(fā)電機定子輸出電能控制至同頻、同相、同幅,再驅(qū)動定子出口接觸器合閘,實現(xiàn)并網(wǎng);當(dāng)機組的發(fā)電功率小于某值持續(xù)幾秒后或風(fēng)機或電網(wǎng)出現(xiàn)運行故障時,變流器驅(qū)動發(fā)電機定子出口接觸器分閘,實現(xiàn)機組的脫網(wǎng)。
發(fā)電機轉(zhuǎn)速調(diào)節(jié):機組并網(wǎng)后在額定負荷以下階段運行時,通過控制發(fā)電機轉(zhuǎn)速實現(xiàn)機組在最佳λ曲線運行,通過將風(fēng)輪機當(dāng)做風(fēng)速儀測量實時轉(zhuǎn)距值,調(diào)節(jié)機組至最佳狀態(tài)運行。
功率控制:當(dāng)機組進入恒定功率區(qū)后,通過和變頻器的通訊指令,維持機組輸出而定的功率。
無功功率控制:通過和變頻器的通訊指令,實現(xiàn)無功功率控制或功率因數(shù)的調(diào)節(jié)。
(8)安全鏈回路
安全鏈回路獨立于主控系統(tǒng),并行執(zhí)行緊急停機邏輯,所有相關(guān)的驅(qū)動回路有后備電池供電,保證系統(tǒng)在緊急狀態(tài)可靠執(zhí)行。
