
摘 要: 采用具有電細分的步進電機" title="步進電機">步進電機驅(qū)動技術可實現(xiàn)精密控制系統(tǒng)中高精度的位移。基于單片機的直流電壓控制的電細分驅(qū)動" title="細分驅(qū)動">細分驅(qū)動技術,避免了繞組互感帶來的誤差,提高了細分精度。實驗表明,當采用精密絲桿機構、螺距為1mm、步進電機步距角為1.8°、實現(xiàn)128細分時,可調(diào)整組件每步位置移動為0.04μm,最大誤差為15%,均方誤差為3.9%。
關鍵詞: 步進電機 直流電壓控制 細分
在許多精密控制系統(tǒng)中需要有較高的位移精度。為實現(xiàn)高精度的位移與調(diào)整,常采用具有電細分的步進電機驅(qū)動技術。步進電機具有控制簡單、無積累誤差等優(yōu)點。通常步進電機的電細分驅(qū)動有斬波恒流" title="恒流">恒流驅(qū)動與脈沖寬度調(diào)制" title="脈沖寬度調(diào)制">脈沖寬度調(diào)制驅(qū)動等方法[1~2]。而采用單片機直流電壓控制的電細分驅(qū)動方法,則具有線路簡單、細分精度高的特點[3]。
1 電細分驅(qū)動的原理
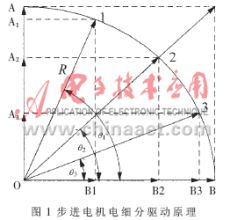
步進電機的電細分驅(qū)動是通過對電機勵磁繞組電流進行控制,使步進電機定子的合成磁場成為按細分步距旋轉的磁場,從而帶動轉子轉動實現(xiàn)的。當兩相相鄰繞組同時通以不同大小的電流時,各相產(chǎn)生的轉矩之和為零的位置為新的平衡位置,這樣就實現(xiàn)了細分。圖1所示的是步進電機電細分驅(qū)動的原理。如果將A相通電時磁場方向定義為起始位“0”,從A相通電變?yōu)锽相通電磁場方向旋轉了90°,這是步進電機整步運行情況。如果A相、B相同時通電且通電電流相同,合成矢量方向為圖中2所示方向,這是步進電機半步運行的情況。若以A相或B相單獨通電時產(chǎn)生的磁場大小為半徑(以R表示)畫四分之一圓(如圖2所示),即可算出位置“1”時的兩分量A1=Rsinθ1,B1=Rcosθ1,同理可以算出A2=Rsinθ2,B2=Rcosθ2;A3=Rsinθ3,B3=Rcosθ3。由于步進電機的運行依賴于電機內(nèi)部定子繞組產(chǎn)生的磁場,而磁場的大小又依賴于線圈繞組中電流I的大小,步進電機的定子繞組在加載直流電壓的情況下,可以近似為阻性負載,所以可以采用調(diào)整加載在定子繞組兩端的直流電壓來控制定子繞組中電流的方法,從而實現(xiàn)步進電機按細分后的步距角轉動[4]。
2 細分驅(qū)動控制電路
細分驅(qū)動控制技術是步進電機實現(xiàn)細分運行的關鍵。常用的細分驅(qū)動有斬波恒流驅(qū)動和脈沖寬度調(diào)制驅(qū)動等方法。斬波恒流驅(qū)動能大大提高了高頻響應,消除了電機能量過剩引起的共振現(xiàn)象,但斬波恒流驅(qū)動的采樣信號來自反饋電流,放大電路的諧振會給控制環(huán)帶來噪聲,引起較大的誤差。
脈沖寬度調(diào)制驅(qū)動能抑制諧波,減少諧波損耗。如果采用脈沖寬度調(diào)制進行細分,電機繞組始終處于通斷狀態(tài),通斷的頻率與調(diào)制電壓的頻率一致。當某一相通電流時,與之相鄰的相便會產(chǎn)生感應電壓,感應電壓的大小與調(diào)制電壓的頻率等參數(shù)有關,這樣就疊加了一個附加磁場,嚴重影響了細分精度。
采用基于單片機的直流電壓驅(qū)動控制步進電機的方法,能較好地克服上述缺陷。該細分控制器由單片機、D/A" title="D/A">D/A轉換器、電平轉換器、功率放大電路等部分組成,其硬件系統(tǒng)原理框圖如圖2所示。
由單片機輸出的數(shù)字細分控制信號通過 D/A轉換器轉換為階梯波,經(jīng)電平轉換后,由功率放大電路輸出,控制步進電機的相電壓,實現(xiàn)細分驅(qū)動。由于輸出的是恒定電壓,從而避免了脈沖寬度調(diào)制驅(qū)動帶來的感應電壓對細分的影響。另外,因為選用了高精度的D/A轉換器,加在繞組兩端的電壓值與理論值誤差很小。D/A轉換器的分辨率影響細分數(shù),為提高細分數(shù),選用了12位D/A轉換器MAX526,它具有四個獨立的D/A轉換通道,享有獨立的參考電壓,其分辨率為:

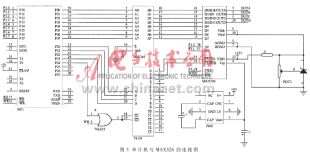
根據(jù)電機的特性及電機繞組中電流的額定值確定vref的值。圖3為單片機與MAX526的連接圖。功率驅(qū)動電路使用可編程集成穩(wěn)壓器,其電壓調(diào)整范圍大,外圍電路簡單,輸出功率大。驅(qū)動電路的合理、可靠保證了電機的負載能力和運行平穩(wěn)。
3 控制軟件
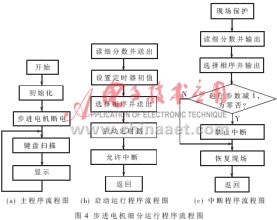
控制軟件采用模塊化設計方案,為了保證系統(tǒng)運行的速度,較為復雜的數(shù)據(jù)處理采用了查表方式,以節(jié)省CPU的運行時間;同時為了提高整個系統(tǒng)的可靠性和抗干擾能力,軟件設計中融入了相應的抗干擾措施,如重復刷新技術、抗查詢死循環(huán)措施等,以提高系統(tǒng)的整體性能。圖4為步進電機細分運行的程序流程圖。
4 細分步距角的測量與實測數(shù)據(jù)
為了進一步了解細分精度,對細分步距角進行了測量。這里采用光學自準方法對電機的角位移進行測量,測試儀器使用自準直儀和高精度數(shù)顯轉臺等設備。圖5為實現(xiàn)128細分時一個整步步距內(nèi)細分角的變化圖(以42BYGH型兩相四拍為例,整步步距為1.8°)。
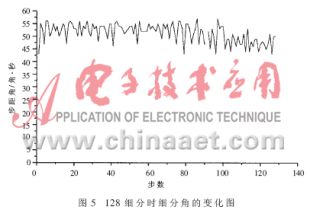
從實測數(shù)據(jù)分析可知,實現(xiàn)128細分時,最大誤差達15%,均方誤差為3.9%。這是由于測量帶來的誤差,電源電壓的波動,電流諧波對繞組電感的影響,齒槽、鐵心材料、邊界條件等因素的存在,導致氣隙磁場偏離預期位置引起的。
采用基于單片機控制直流電壓驅(qū)動的細分方法,可實現(xiàn)128微步驅(qū)動(步進電機整步距角為1.8°),最大誤差為15%,均方誤差為3.9%。而采用脈沖寬度調(diào)制驅(qū)動的方法,經(jīng)實際測試,對額定電壓為12V的步進電機,當調(diào)制頻率為1kHz時,其感應電壓的最大值達到2V,細分誤差達200%。當調(diào)制頻率降低時,雖然感應電壓變小,但電機出現(xiàn)振動。另外,采用斬波恒流驅(qū)動的電細分方法,誤差也在30%~40%。而采用本文介紹的直流電壓驅(qū)動細分方法,其誤差明顯小于另外兩種驅(qū)動方法。
采用精密絲桿機構,螺距為1mm,步進電機步距角為1.8°,可實現(xiàn)調(diào)整組件每步位移為0.04μm。這樣高精度的位移能滿足許多精密控制系統(tǒng)的需求。如選用精度更高的D/A轉換器,則可進一步提高細分數(shù)。目前已將這種電細分驅(qū)動技術成功地運用在同步輻射三維調(diào)整滑臺的控制系統(tǒng)中。
參考文獻
1 張志利.步進電機超高分辨率細分控制函數(shù)發(fā)生器的設計與實現(xiàn)[J].微特電機,2001(1)
2 楊紅紅,張 琛,陳愛國.步進電機恒力矩細分驅(qū)動電路的實現(xiàn)[J].電子技術,2000(3)
3 晉兆瓊,夏超英,張 建. 基于單片機的步進電機細分驅(qū)動的實現(xiàn)[J].電氣自動化,2000(6)
4 韓光鮮,王宗培,程 智.里見博文.混合式步進電機非線性仿真模型的精確化[J].中國電機工程學報,2002(5)