
0 引言
隨著電子技術(shù)的飛速發(fā)展,雷達(dá)技術(shù)也得到了長(zhǎng)足的進(jìn)步。雷達(dá)是以軍事目的發(fā)展起來的,在當(dāng)今主基調(diào)為和平與發(fā)展的年代,雷達(dá)技術(shù)越來越多地向民用方面轉(zhuǎn)移。像我國(guó)普遍用于交通方面的測(cè)速雷達(dá),正在飛速發(fā)展的汽車防撞雷達(dá)等。隨著成本的不斷降低,雷達(dá)在民用方面的用途會(huì)越來越廣泛。
雷達(dá)進(jìn)行測(cè)距,與激光測(cè)距相比,不受氣候條件限制,距離遠(yuǎn),精度高。本文將主要敘述微型測(cè)距雷達(dá)的原理及組成。
微型測(cè)距雷達(dá)主要用于以下幾個(gè)方面:
(1)導(dǎo)彈和炮彈的微波引信;
(2)汽車前視防撞雷達(dá);
(3)堆積物和小山頭的高度測(cè)量;
(4)高速公路及城市道路的機(jī)動(dòng)車流量測(cè)量;
(5)建筑行業(yè)的樓層測(cè)量;
(6)罐裝液面高度測(cè)量;
(7)其他要求精確近距離測(cè)量的地方。
1 微型測(cè)距雷達(dá)的原理及組成
1.1 測(cè)距方法
通常雷達(dá)測(cè)距的方法有三種:脈沖法測(cè)距;調(diào)頻連續(xù)波法測(cè)距;相位法測(cè)距。常用的為前兩種。脈沖法測(cè)距分辨率要達(dá)到距離精度1 m以下,脈沖寬度必須小于6.67 ns,即使當(dāng)今脈沖雷達(dá)普遍采用脈沖壓縮的情況下,精度要做到厘米級(jí)是相當(dāng)困難的,何況是以增大接收機(jī)帶寬,降低接收靈敏度為代價(jià),電路上也難以實(shí)現(xiàn)。因而對(duì)于較精確的距離測(cè)量,一般都采用調(diào)頻連續(xù)波測(cè)距的方法。
調(diào)頻連續(xù)波測(cè)距有三角波調(diào)制和正弦波調(diào)制兩種,這里選擇三角波調(diào)制。
在三角波調(diào)制中,測(cè)距公式為:
![]()
式中:R為距離;c為光速;![]() 為三角波正向發(fā)射頻率與接收頻率之差,fb-為三角波負(fù)向發(fā)射頻率與接收頻率之差;f為三角波調(diào)制頻率;△fm為受調(diào)制的發(fā)射頻率最大頻偏的二分之一。
為三角波正向發(fā)射頻率與接收頻率之差,fb-為三角波負(fù)向發(fā)射頻率與接收頻率之差;f為三角波調(diào)制頻率;△fm為受調(diào)制的發(fā)射頻率最大頻偏的二分之一。
三角波調(diào)制頻率的選擇與距離分辨率有關(guān)。假如選擇f=200 Hz,△fm=100 MHz,而此時(shí)測(cè)出的頻率fbav為50 kHz,則可以計(jì)算出R≈ 93.750 0 m;如果測(cè)出的頻率fbav=50.001 kHz,R=93.751 8 m,二者之差為1.8 mm,即每1 Hz代表1.8 mm的距離。提高調(diào)制頻率f的值,分辨率還可以增加。假如f=1 000 Hz,其他參數(shù)不變,同樣測(cè)出的頻率fbav=50 kHz,R=18.750 O m;fbav=50.001 kHz,R=18.750 4 m,相差0.4 mm,每1 Hz代表O.4 mm的距離。
如果是運(yùn)動(dòng)目標(biāo),根據(jù)測(cè)速公式:
![]()
求出運(yùn)動(dòng)目標(biāo)的速度。式中V為目標(biāo)的徑向速度,λ為發(fā)射微波的波長(zhǎng)。當(dāng)然,固定目標(biāo)的fb+與fb-的值相等。
1.2 組成
根據(jù)三角波調(diào)制的雷達(dá)原理,首先必須有一個(gè)微波頭,微波頭可在測(cè)速微波頭的基礎(chǔ)上,將體效應(yīng)振蕩器加一個(gè)變?nèi)莨芨臑閴嚎厥秸袷帲苯踊祛l。同時(shí)還需要一個(gè)三角波發(fā)生器。為了修正壓控振蕩器的非線性,使之頻率線性變化,必須進(jìn)行非線性修正。
為了增強(qiáng)效果,可采用模擬濾波器組進(jìn)行積累處理。當(dāng)然也可以通過高速A/D采樣后將模擬信號(hào)變?yōu)閿?shù)字信號(hào)用DSP進(jìn)行數(shù)字信號(hào)處理,不過成本較高。
和工控機(jī)、PC104模塊相比,采用單片機(jī)控制電路比較簡(jiǎn)單,且成本較低,由于沒有復(fù)雜的運(yùn)算,速度完全能夠滿足要求。
這個(gè)設(shè)計(jì)功耗較小,用電池就可滿足電源供給要求。
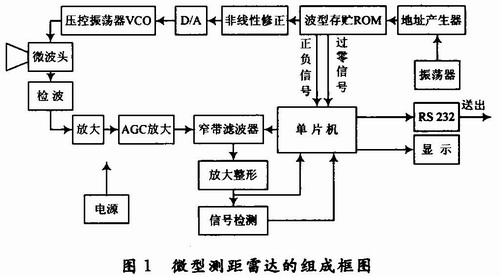
微型測(cè)距雷達(dá)的組成框圖如圖1所示。
1.3 工作原理
三角波調(diào)制頻率選200 Hz,D/A選擇12位,ROM為16位數(shù)據(jù)輸出,12位數(shù)據(jù)作為D/A的輸入;一位作為三角波正斜率和負(fù)斜率變化時(shí)的脈沖輸出,正斜率為“1”,負(fù)斜率為“0”;另一位作為一個(gè)三角波周期間的過零信號(hào),送單片機(jī)的中斷INT0,當(dāng)三角波正負(fù)斜率變化時(shí),輸出脈沖信號(hào)。單片機(jī)產(chǎn)生過零中斷后,判斷正負(fù)信號(hào),為“1”,得到的是fb+;為“O”,得到的是fb-。
雷達(dá)工作時(shí),單片機(jī)控制窄帶濾波器不斷的進(jìn)行掃描,當(dāng)某一個(gè)濾波器有信號(hào)時(shí),由可重觸發(fā)單穩(wěn)態(tài)電路組成的信號(hào)檢測(cè)電路輸出由“0”變?yōu)?ldquo;1”,單片機(jī)根據(jù)輸出的窄帶濾波器獲得帶內(nèi)頻率,判斷出精度不太高的距離范圍,利用放大整形輸出進(jìn)行計(jì)數(shù)或測(cè)量脈沖的周期,獲得足夠精確的頻率值,即為準(zhǔn)確距離。根據(jù)公式計(jì)算出R和V送顯示器予以顯示,或通過RS 232串口送上一級(jí)的計(jì)算機(jī)系統(tǒng)。
2 各部分的組成
2.1 微波頭
微波頭包括喇叭天線、體效應(yīng)振蕩器、環(huán)行器、混頻器。體效應(yīng)振蕩器產(chǎn)生發(fā)射微波,喇叭天線作為微波對(duì)外收發(fā)之用,環(huán)行器將收發(fā)進(jìn)行隔離,混頻器取出發(fā)射頻率和接收頻率的差值。微波頭國(guó)外常用的有24 GHz,35 GHz和77 GHz,可采用Wisewave公司的產(chǎn)品。其功率輸出為+10 dBm,頻偏DC為100 MHz,波束寬度120,園極化。
2.2 三角波發(fā)生器
三角波發(fā)生器采用數(shù)字形成。D/A為12位,要產(chǎn)生200 Hz的調(diào)制頻率,則振蕩器約為0.819 2 MHz。考慮到一般晶體的頻率為MHz量級(jí),地址產(chǎn)生器為一個(gè)13位的計(jì)數(shù)器,選用74HC4040,計(jì)數(shù)器不用最低位,那么振蕩器的頻率為200 Hz×212×2=1.638 4 MHz,可以用TTL門電路作振蕩器,這個(gè)設(shè)計(jì)用的是74HC04。
波形存儲(chǔ)選用E2PROM芯片AT28C64,晶體選用1.683 4MHz。最重要的一點(diǎn)是必須測(cè)出微波頭的非線性曲線,以便在非線性修正ROM中裝入修正數(shù)據(jù),簡(jiǎn)化起見,可以在波形存儲(chǔ)ROM中燒制修正數(shù)據(jù),無須再加專用的非線性修正電路。
2.3 窄帶濾波器
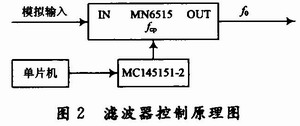
模擬器件的發(fā)展與集成為小型化提供了充分的條件,像松下公司的MN6515,僅為8腳,其帶通濾波器的中心頻率f0可由外加的時(shí)鐘頻率fcp控制,其比值fcp/f0約為15.7。只要改變fcp的值,帶通濾波器的中心頻率就會(huì)在O~32 kHz范圍內(nèi)移動(dòng),非常方便,可采用圖2方式進(jìn)行控制。
另外還有一種窄帶濾波器MAXIM的MAX262,由編碼輸入控制f0和Q的值,共有64階濾波器,128級(jí)Q值控制。同時(shí)也可以控制振蕩頻率,由多片MAX262組成,使窄帶濾波器的階數(shù)達(dá)到幾百甚至上千。控制Q值的不同,在頻率的低端到高端,可以將窄帶濾波器的3 dB帶寬設(shè)計(jì)成相同或相近的寬度。
2.4 放大與AGC放大電路
前級(jí)放大電路可采用各公司的低噪聲運(yùn)放,AGC電路選用AD公司的AD603,或BB公司的VGA610,放大整形可選用TI公司或其他公司新出的R~R輸出的運(yùn)放。
2.5 單片機(jī)
單片機(jī)選用Atmel公司的AT89C51,也可選用其他公司的單片機(jī),如PIC或AVR系列。這些單片機(jī)都是低成本且為人們所常用。
3 軟件組成
軟件用匯編語言編寫,流程圖如圖3所示。

4 結(jié)語
低成本微型測(cè)距雷達(dá)經(jīng)實(shí)驗(yàn)在原理上是行得通的,但距離較近,實(shí)際測(cè)試后發(fā)現(xiàn)微波頭采用直接混頻方式輸出靈敏度較低。下一步改進(jìn)需要增加一個(gè)中頻,放大后解調(diào),再進(jìn)行視頻放大。
對(duì)于要求測(cè)距更遠(yuǎn)的雷達(dá),可通過增加發(fā)射功率,增大天線面積的方法。當(dāng)功率較大時(shí),考慮到連續(xù)波雷達(dá)泄露的影響,需要將發(fā)射天線與接收天線分開。對(duì)于更近距離的測(cè)量,例如小于2~3 m,可采用超聲波測(cè)量。微型測(cè)距雷達(dá)的用途非常廣闊,今后必將大量用于民用的許多領(lǐng)域。