
0 引言
平面機(jī)構(gòu)創(chuàng)意組合實(shí)驗(yàn)臺(tái)提供了機(jī)構(gòu)運(yùn)動(dòng)方案創(chuàng)新組合設(shè)計(jì)平臺(tái),一方面,以機(jī)構(gòu)及機(jī)構(gòu)組合系統(tǒng)設(shè)計(jì)為主線,以機(jī)構(gòu)運(yùn)動(dòng)創(chuàng)意組合設(shè)計(jì)為重點(diǎn),培養(yǎng)學(xué)生的動(dòng)手能力、創(chuàng)新能力和分析解決問(wèn)題的能力;另一方面,學(xué)生通過(guò)“平面機(jī)構(gòu)創(chuàng)意組合及參數(shù)分析實(shí)驗(yàn)臺(tái)”獲得測(cè)試數(shù)據(jù)及曲線,通過(guò)分析曲線變化的原因評(píng)價(jià)系統(tǒng)和設(shè)計(jì)方案,如安裝精度、改善方法、構(gòu)件運(yùn)動(dòng)規(guī)律分析等,提高了學(xué)生運(yùn)用所學(xué)知識(shí)分析和解決問(wèn)題的能力,比單純的驗(yàn)證性實(shí)驗(yàn)按部就班地操作前進(jìn)了一大步。這就需要實(shí)驗(yàn)臺(tái)具有精確的檢測(cè)系統(tǒng),并且檢測(cè)系統(tǒng)應(yīng)在準(zhǔn)確測(cè)試的基礎(chǔ)上保證開(kāi)放性和靈活性。基于虛擬儀器技術(shù)可以開(kāi)發(fā)適應(yīng)不同應(yīng)用場(chǎng)合的虛擬儀器測(cè)試方案,更好地組建自動(dòng)化程度較高,數(shù)據(jù)處理分析能力較強(qiáng)的測(cè)試系統(tǒng)。本文就以此為出發(fā)點(diǎn),開(kāi)發(fā)設(shè)計(jì)了一套基于虛擬儀器的應(yīng)用于該實(shí)驗(yàn)臺(tái)的測(cè)控軟件。
1 試驗(yàn)臺(tái)的工作原理及組成
平面機(jī)構(gòu)創(chuàng)意組合實(shí)驗(yàn)臺(tái)提供組成機(jī)構(gòu)的最小單元中的各種構(gòu)件、運(yùn)動(dòng)副以及一個(gè)能多層、多面、多維的框架,通過(guò)改變連桿機(jī)構(gòu)的尺寸實(shí)現(xiàn)復(fù)雜的運(yùn)動(dòng)規(guī)律,通過(guò)不同構(gòu)件和運(yùn)動(dòng)副的創(chuàng)新組合實(shí)現(xiàn)多種機(jī)構(gòu)運(yùn)動(dòng)方案,通過(guò)不同的構(gòu)件拼接成不同的基本機(jī)構(gòu),包括平面連桿機(jī)構(gòu)、齒輪傳動(dòng)機(jī)構(gòu)、凸輪機(jī)構(gòu)、間歇運(yùn)動(dòng)機(jī)構(gòu)(有槽輪機(jī)構(gòu)、棘輪機(jī)構(gòu)、不完全齒輪機(jī)構(gòu))等基本機(jī)構(gòu),同時(shí)還可以將基本機(jī)構(gòu)進(jìn)行拼接,包括齒輪一桿組合機(jī)構(gòu)凸輪組合機(jī)構(gòu)、齒輪一齒條組合機(jī)構(gòu)、鏈一齒輪機(jī)構(gòu)等。通過(guò)傳感器裝置測(cè)定位移、速度、加速度曲線,利用計(jì)算機(jī)顯示出從動(dòng)件運(yùn)動(dòng)曲線的變化,從而將測(cè)試、仿真、設(shè)計(jì)與分析有機(jī)地結(jié)合起來(lái)。
本文以JPCC-Ⅱ型平面機(jī)構(gòu)創(chuàng)新組合試驗(yàn)臺(tái)為例,探討將虛擬儀器技術(shù)應(yīng)用到實(shí)驗(yàn)臺(tái)的檢測(cè)分析系統(tǒng)中的情況。該試驗(yàn)臺(tái)主要包括兩大部分,機(jī)械結(jié)構(gòu)部分和檢測(cè)分析系統(tǒng)。機(jī)械結(jié)構(gòu)如圖1所示,主要由底座(安裝平臺(tái))、平面連桿機(jī)構(gòu)、凸輪機(jī)構(gòu)、間歇機(jī)構(gòu)、齒輪傳動(dòng)機(jī)構(gòu)、帶(鏈)傳動(dòng)等機(jī)構(gòu)組成。
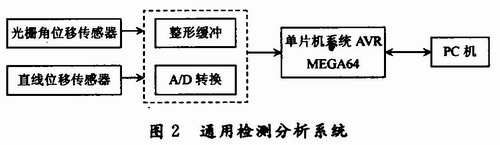
通用檢測(cè)分析系統(tǒng)如圖2所示,配備有速度、角位移、壓力等各種傳感器,對(duì)多種參數(shù)進(jìn)行測(cè)量,同時(shí)采用單片機(jī)與A/D轉(zhuǎn)換集成相結(jié)合進(jìn)行數(shù)據(jù)采集、處理分析并通過(guò)RS 232接口與PC機(jī)的通信,以達(dá)到適時(shí)顯示運(yùn)動(dòng)曲線的目的。
在該檢測(cè)系統(tǒng)中,雖然能夠?qū)τ谄矫鏅C(jī)構(gòu)運(yùn)動(dòng)過(guò)程中的一些位移、轉(zhuǎn)角信號(hào)進(jìn)行顯示,但不能達(dá)到在機(jī)構(gòu)創(chuàng)新組合過(guò)程中對(duì)于測(cè)試過(guò)程中的各種情況的處理能力,還存在一些不足:
(1)缺乏開(kāi)放性,實(shí)驗(yàn)?zāi)J焦潭ǎ`活性較差,只能依照系統(tǒng)內(nèi)部設(shè)定的方式進(jìn)行有限的測(cè)試,不能根據(jù)測(cè)試對(duì)象條件的改變而隨意改變一些測(cè)試方法、測(cè)試參數(shù)以及測(cè)試結(jié)果的表現(xiàn)形式等。
(2)數(shù)據(jù)處理能力較差,界面較單調(diào)。對(duì)于所有的數(shù)據(jù)只能進(jìn)行一定形式的處理,對(duì)于測(cè)試結(jié)果只能以一定的形式進(jìn)行顯示。例如由于實(shí)驗(yàn)臺(tái)工作條件必定會(huì)造成的一些誤差,包括采集過(guò)程中的一些隨機(jī)誤差,還有在操作過(guò)程中的操作誤差,這些誤差必然會(huì)對(duì)于結(jié)果有一定的影響,而其并不能對(duì)于不同工作條件下引起的一些誤差進(jìn)行適當(dāng)?shù)奶幚怼?br />
針對(duì)該實(shí)驗(yàn)臺(tái)存在的這些缺陷,將基于LabVIEW軟件的虛擬儀器技術(shù)引入到檢測(cè)系統(tǒng)中,使該實(shí)驗(yàn)臺(tái)的開(kāi)放性、可操作性及數(shù)據(jù)處理能力大大提高,從而使精確性也提高。
2 基于虛擬儀器的檢測(cè)分析系統(tǒng)
將具有一種或多種功能的通用模塊組建起來(lái),就可以構(gòu)成任何一種儀器。虛擬儀器也是一樣的,由三大功能模塊構(gòu)成,包括信號(hào)的采集與控制、信號(hào)的分析與處理、結(jié)果的表達(dá)與輸出。
虛擬儀器系統(tǒng)的一個(gè)核心技術(shù)就是軟件技術(shù),美國(guó)NI公司提出的“軟件就是儀器”可以看出軟件對(duì)于虛擬儀器的重要性。在虛擬儀器系統(tǒng)中用靈活強(qiáng)大的計(jì)算機(jī)軟件代替?zhèn)鹘y(tǒng)儀器的某些硬件,特別是系統(tǒng)中應(yīng)用計(jì)算機(jī)直接參與測(cè)試信號(hào)的產(chǎn)生和測(cè)量特征的解析,使儀器中的一些硬件從系統(tǒng)中“消失”,而由計(jì)算機(jī)的軟硬件資源來(lái)完成它們的功能。
虛擬儀器測(cè)試系統(tǒng)的軟件,主要包括儀器驅(qū)動(dòng)程序、儀器面板控制軟件和通用I/O接口軟件。虛擬儀器驅(qū)動(dòng)程序是一組應(yīng)用層次上的軟件模塊,它是處理與特定儀器進(jìn)行控制通信的一種軟件;儀器面板控制軟件即測(cè)試管理層,是用戶與儀器之間交流信息的紐帶;在虛擬儀器系統(tǒng)中,I/O接口軟件作為虛擬儀器系統(tǒng)結(jié)構(gòu)中承上啟下的一層,其模塊化與標(biāo)準(zhǔn)化越來(lái)越重要。
本系統(tǒng)的總體設(shè)計(jì)采用PC-DAQ方案,通過(guò)多傳感器采集和數(shù)據(jù)融合并配以PC機(jī)平臺(tái)和虛擬儀器軟件,構(gòu)成了平面機(jī)構(gòu)試驗(yàn)臺(tái)各種輸入、輸出參數(shù)的數(shù)據(jù)采集控制儀器和系統(tǒng)。
該實(shí)驗(yàn)臺(tái)所要檢測(cè)的數(shù)據(jù)主要包括主軸轉(zhuǎn)動(dòng)時(shí)的轉(zhuǎn)角信號(hào)、擺桿擺動(dòng)時(shí)的擺角信號(hào)和滑塊移動(dòng)時(shí)的線位移信號(hào)。在所設(shè)計(jì)的檢測(cè)系統(tǒng)中,傳感器采集信號(hào),然后通過(guò)專用的屏蔽電纜線將傳感器所采集的電信號(hào)經(jīng)虛擬儀器專用DAQ板卡送入計(jì)算機(jī)。所得到的數(shù)據(jù)通過(guò)軟件進(jìn)行處理。結(jié)構(gòu)框圖如圖3所示。

2.1 系統(tǒng)硬件設(shè)計(jì)
本系統(tǒng)采用PXI-1024組合式機(jī)箱,為系統(tǒng)提供了堅(jiān)固的模塊化封裝結(jié)構(gòu),其具有8個(gè)PXI/Compact PCI插槽,第一槽是系統(tǒng)控制器,其余7個(gè)插槽是外圍擴(kuò)展槽,可用于安裝數(shù)據(jù)采集卡,示波器等;機(jī)箱還具有高性能PXI背板,可以獨(dú)立地向每個(gè)外圍擴(kuò)展槽提供PXI10 MHz(PXI-CLKl0)系統(tǒng)時(shí)鐘信號(hào),用于多模塊的同步測(cè)量或是系統(tǒng)控制。
同時(shí)選取了PXI-6251型多功能數(shù)據(jù)采集卡,插入機(jī)箱的左端第三個(gè)插槽。
物理信號(hào)的獲得通過(guò)傳感器實(shí)現(xiàn),其中編碼器采集轉(zhuǎn)角信號(hào),角位移傳感器采集擺角信號(hào),直線位移傳感器采集線位移信號(hào)。
對(duì)于數(shù)據(jù)采集系統(tǒng)來(lái)說(shuō),由于來(lái)自于電力線或機(jī)器的影響,會(huì)產(chǎn)生噪聲信號(hào),對(duì)于這種情況,采用低通濾波器來(lái)實(shí)現(xiàn)最大程度的抑制。另外,由于采樣率低而產(chǎn)生信號(hào)混疊,奈奎斯特定理指出,如果對(duì)一種模擬信號(hào)進(jìn)行采樣,所有頻率超過(guò)1/2采樣率的信號(hào)都會(huì)以一種低頻率信號(hào)的方式出現(xiàn)。只有在采樣前把所有頻率超過(guò)1/2采樣率的信號(hào)消除才能避免這種失真。基于以上兩種可能出現(xiàn)噪聲信號(hào)的原因,本系統(tǒng)采用模擬低通濾波器、數(shù)字濾波器兩者的結(jié)合。模擬濾波器通常放在A/D轉(zhuǎn)換器的前面,用來(lái)消除信號(hào)通道位于A/D轉(zhuǎn)換之間的高頻噪聲和干擾。數(shù)字濾波器被放在A/D轉(zhuǎn)換器的后面,通過(guò)采用平均技術(shù)來(lái)減少通帶內(nèi)頻率上的噪聲。
本系統(tǒng)采用雙二階環(huán)濾波電路,利用兩個(gè)以上的加法器、積分器等組成的運(yùn)算放大電路,根據(jù)要求的傳遞函數(shù),引入適當(dāng)?shù)姆答仯瑯?gòu)成濾波電路。其突出特點(diǎn)是電路靈敏度低,特性非常穩(wěn)定,并可實(shí)現(xiàn)多種濾波功能,這里使用低通濾波抑制部分噪聲信號(hào)。具體電路如圖4所示。
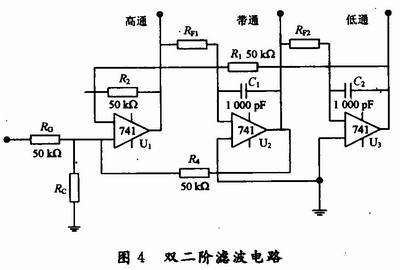
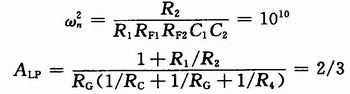
構(gòu)成低頻濾波器時(shí),電路固有頻率(單位:Hz)和通帶增益如下:
2.2 軟件實(shí)現(xiàn)
軟件是檢測(cè)系統(tǒng)的靈魂。本實(shí)驗(yàn)臺(tái)測(cè)控系統(tǒng)應(yīng)用虛擬儀器圖形化軟件LabVIEW,該軟件具有運(yùn)算速度快、界面友好、人機(jī)交換便捷、操作直觀方便等特點(diǎn)。該測(cè)試系統(tǒng)的主程序界面如圖5所示:實(shí)現(xiàn)對(duì)所測(cè)試的不同項(xiàng)目進(jìn)行有效選擇,并在選擇好輸入項(xiàng)目的基礎(chǔ)上,從主程序界面中選擇所要測(cè)試的項(xiàng)目,點(diǎn)擊,則系統(tǒng)進(jìn)入所要進(jìn)行的性能測(cè)試系統(tǒng)的功能模塊儀器軟件面板。
其中,每一個(gè)功能模塊又分別調(diào)用其子模塊,主要包括數(shù)據(jù)采集模塊、傳感器標(biāo)定模塊、誤差處理模塊、數(shù)據(jù)分析處理模塊、數(shù)據(jù)波形輸出模塊、輸出數(shù)據(jù)保存模塊和數(shù)據(jù)恢復(fù)模塊。
2.2.1 數(shù)據(jù)采集
數(shù)據(jù)采集模塊將各種硬件儀器的驅(qū)動(dòng)程序模塊封裝在組件中,當(dāng)測(cè)試要求改變需要更換新的儀器硬件時(shí),只需更新相應(yīng)參數(shù),并且保證它對(duì)上層的接口保持不變,那么新的儀器硬件就能在原來(lái)的系統(tǒng)中正常運(yùn)行。
2.2.2 傳感器數(shù)據(jù)的標(biāo)定
傳感器的標(biāo)定就是通過(guò)試驗(yàn)建立傳感器輸入量與輸出量之間的關(guān)系。利用已知的標(biāo)準(zhǔn)值輸入到待標(biāo)定的傳感器中,傳感器得到相應(yīng)的輸出量,將輸出量與輸入的標(biāo)準(zhǔn)量繪制成曲線即得標(biāo)定曲線,通過(guò)標(biāo)定曲線可以得出輸入量與輸出量之間的關(guān)系式,從而可以確定標(biāo)定系數(shù)。利用標(biāo)定的數(shù)據(jù)作為測(cè)量數(shù)據(jù)輸入提高了傳感器的使用精度。
2.2.3 數(shù)據(jù)的分析及處理
數(shù)據(jù)分析與處理模塊包括數(shù)據(jù)的邏輯計(jì)算、測(cè)試信號(hào)的圖形顯示、測(cè)量過(guò)程中特性參數(shù)的顯示、誤差的分析、信號(hào)的濾波等,通過(guò)該模塊的工作,可以輸出非常精確的數(shù)據(jù)及其對(duì)應(yīng)的曲線。
(1)信號(hào)濾波
算術(shù)平均值濾波法就是連續(xù)取n個(gè)采樣值進(jìn)行平均。其數(shù)學(xué)表達(dá)式為:

算術(shù)平均濾波法用于對(duì)一般具有隨機(jī)干擾的信號(hào)進(jìn)行濾波。這種信號(hào)的特點(diǎn)是圍繞著一個(gè)平均值,在某一范圍附近作上下波動(dòng)。算術(shù)平均濾波法對(duì)信號(hào)的平滑程度完全取決于N在系統(tǒng)誤差的情況下,當(dāng)n→∞, 項(xiàng)噪聲信號(hào)趨近于零,其平均值趨向于最大期望值,但是實(shí)際上N較小時(shí),平滑度低,但靈敏度高。應(yīng)根據(jù)具體情況選取N,既保證濾波效果,又盡量減少計(jì)算時(shí)間。
項(xiàng)噪聲信號(hào)趨近于零,其平均值趨向于最大期望值,但是實(shí)際上N較小時(shí),平滑度低,但靈敏度高。應(yīng)根據(jù)具體情況選取N,既保證濾波效果,又盡量減少計(jì)算時(shí)間。
(2)誤差處理
回轉(zhuǎn)運(yùn)動(dòng)誤差包括傳動(dòng)誤差和回程誤差。測(cè)量傳動(dòng)誤差,可以采用手工轉(zhuǎn)動(dòng)使電機(jī)的轉(zhuǎn)速不超過(guò)10 r/min,當(dāng)電機(jī)轉(zhuǎn)動(dòng)后,通過(guò)輸入、輸出傳感器分別測(cè)量輸入、輸出角位移,得到的試驗(yàn)數(shù)據(jù)可以在計(jì)算機(jī)內(nèi)進(jìn)行顯示和記錄。瞬時(shí)傳動(dòng)誤差=輸入轉(zhuǎn)角/理論傳動(dòng)比-輸出轉(zhuǎn)角,可以擬合相應(yīng)的曲線。在測(cè)量回程誤差時(shí),去掉電動(dòng)機(jī)、轉(zhuǎn)動(dòng)輸入傳感器,當(dāng)在某一個(gè)角位移處,使輸出端不動(dòng),輸出端反轉(zhuǎn),所反向產(chǎn)生的轉(zhuǎn)角為回程誤差,在若干個(gè)角位移處試驗(yàn),可以擬合出一條回程誤差曲線。
2.2.4 數(shù)據(jù)的保存與恢復(fù)
數(shù)據(jù)保存模塊可以對(duì)實(shí)時(shí)測(cè)量的數(shù)據(jù)進(jìn)行保存,數(shù)據(jù)恢復(fù)模塊可以對(duì)以往測(cè)試的數(shù)據(jù)曲線重新顯示,以利于對(duì)比分析等。
2.3 試驗(yàn)驗(yàn)證
為驗(yàn)證本試驗(yàn)臺(tái)測(cè)控系統(tǒng)設(shè)計(jì)的可行性,現(xiàn)通過(guò)試驗(yàn)臺(tái)對(duì)某曲柄搖桿機(jī)構(gòu)擺桿擺動(dòng)角度進(jìn)行測(cè)試,主要完成數(shù)據(jù)采集、數(shù)據(jù)輸入、信號(hào)處理、數(shù)據(jù)分析、結(jié)果顯示和測(cè)試結(jié)果處理等。檢測(cè)系統(tǒng)前面板如圖6所示。

圖6右上角即為系統(tǒng)輸入?yún)?shù),包括采集參數(shù)和數(shù)據(jù)處理參數(shù),可以根據(jù)測(cè)試對(duì)象的不同,測(cè)試條件的不同進(jìn)行靈活的設(shè)置;右下角為系統(tǒng)輸出參數(shù),可以根據(jù)要求顯示擺桿擺角以及角速度和角加速度的極限值,從而為高速運(yùn)動(dòng)的系統(tǒng)在一定的工作條件下的振動(dòng)和噪聲等研究提供一定的依據(jù);左側(cè)為曲線圖和操作按鈕,除了可以顯示擺動(dòng)角度和時(shí)間之間關(guān)系的曲線圖外,還可以顯示擺動(dòng)角度和主軸轉(zhuǎn)角之間關(guān)系的曲線圖,這樣對(duì)于主軸轉(zhuǎn)速有一定變化的情況下的動(dòng)態(tài)系統(tǒng),可以進(jìn)一步研究動(dòng)力和從動(dòng)件之間的關(guān)系。兩個(gè)曲線圖分別表示擺角與主軸轉(zhuǎn)角之間的關(guān)系和擺角與時(shí)間之間的關(guān)系,橫坐標(biāo)直接標(biāo)注出了兩種測(cè)試的方式即主軸轉(zhuǎn)角和時(shí)間,縱坐標(biāo)對(duì)于不同曲線的意義通過(guò)曲線圖右上角的顯示用不同顏色代表不同的運(yùn)動(dòng)性質(zhì),白色、紅色、綠色分別代表擺動(dòng)角度、角速度、角加速度,這樣既簡(jiǎn)單又清晰的描述除了不同的對(duì)應(yīng)關(guān)系,在同一個(gè)曲線圖中描述出一個(gè)測(cè)試對(duì)象的不同運(yùn)動(dòng)性質(zhì),更有利于對(duì)于同一測(cè)試對(duì)象不同運(yùn)動(dòng)特性的分析與研究。
3 結(jié)語(yǔ)
基于虛擬儀器的平面機(jī)構(gòu)創(chuàng)意組合試驗(yàn)臺(tái)是在原有測(cè)控試驗(yàn)臺(tái)基礎(chǔ)上,引進(jìn)虛擬儀器技術(shù),使其通用性更強(qiáng),實(shí)驗(yàn)系統(tǒng)組件更靈活,數(shù)據(jù)處理能力更強(qiáng),測(cè)量數(shù)據(jù)更準(zhǔn)確、更快捷,其開(kāi)放的環(huán)境更有利于發(fā)揮學(xué)生的能動(dòng)性和創(chuàng)造性。同時(shí),LabVIEW軟件是一種圖形化語(yǔ)言,更適合于工程技術(shù)人員應(yīng)用,實(shí)驗(yàn)過(guò)程中可以根據(jù)需要自行編制測(cè)試軟件或修改軟件部分模塊,從而實(shí)現(xiàn)開(kāi)放式試驗(yàn)的目的,不但可以進(jìn)行基礎(chǔ)性的教學(xué)試驗(yàn),而且可以進(jìn)行相應(yīng)的科研試驗(yàn)項(xiàng)目。