
摘要:本平臺(tái)基于Samsung公司的友善之譬QQ2440V3開(kāi)發(fā)板,它采用Samsung S3C2440為微處理器,Samsung S3C2440的內(nèi)核為ARM920T,且采用Linux2.6.13內(nèi)核作為它的操作系統(tǒng)。設(shè)計(jì)了硬件系統(tǒng),并實(shí)現(xiàn)驅(qū)動(dòng)程序?qū)?a class="innerlink" href="http://wldgj.com/tags/步進(jìn)電機(jī)" title="步進(jìn)電機(jī)" target="_blank">步進(jìn)電機(jī)的控制,在QQ2440V3開(kāi)發(fā)板上的實(shí)驗(yàn)結(jié)果表明驅(qū)動(dòng)運(yùn)行正常、穩(wěn)定。這是實(shí)現(xiàn)激光雕刻的核心,為以后實(shí)現(xiàn)傳能激光雕刻夯實(shí)了基礎(chǔ)。
關(guān)鍵詞:ARM;Linux;步進(jìn)電機(jī);驅(qū)動(dòng)
0 引言
隨著激光雕刻機(jī)的不斷發(fā)展和改進(jìn),嵌入式Linux的激光雕刻機(jī)比CNC(Computer numerical control)激光雕刻的優(yōu)勢(shì)不斷顯現(xiàn),它大幅度提高了處理能力,方便了設(shè)計(jì)開(kāi)發(fā),節(jié)約了成本,是未來(lái)經(jīng)濟(jì)型激光雕刻機(jī)發(fā)展的趨勢(shì)。而嵌入式ARM(Advanced RISC Machines)Linux步進(jìn)電機(jī)驅(qū)動(dòng)是實(shí)現(xiàn)激光雕刻的核心。
嵌入式開(kāi)發(fā)過(guò)程中,經(jīng)常需要為特定設(shè)備開(kāi)發(fā)驅(qū)動(dòng)程序。這些驅(qū)動(dòng)程序的編寫(xiě)和編譯與PC上的Linux驅(qū)動(dòng)開(kāi)發(fā)相比存在明顯的差異,需要考慮的因素較多,實(shí)現(xiàn)過(guò)程較為復(fù)雜。本文以Samsung公司的友善之譬S3C2440開(kāi)發(fā)板為例,探討如何使用嵌入式Linux開(kāi)發(fā)字符設(shè)備驅(qū)動(dòng)程序來(lái)驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)。
1 硬件系統(tǒng)設(shè)計(jì)方案
控制系統(tǒng)由處理器、步進(jìn)電機(jī)驅(qū)動(dòng)器、步進(jìn)電機(jī)3部分組成,如圖1所示。

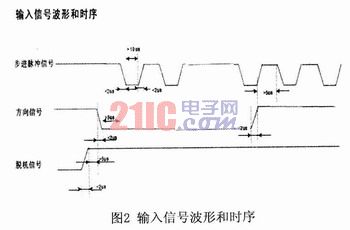
處理器用友善之譬QQ2440V3開(kāi)發(fā)板,內(nèi)核為ARM920T。步進(jìn)電機(jī)驅(qū)動(dòng)器采用北京和利時(shí)電機(jī)技術(shù)有限公司(原四通電機(jī))的SH-20403。驅(qū)動(dòng)器共有四路輸入信號(hào):公共、脈沖信號(hào)輸入、方向信號(hào)輸入和脫機(jī)信號(hào)輸入。驅(qū)動(dòng)器的輸入信號(hào)既可以采用共陽(yáng)極也可以采用共陰極接線方式,使用共陽(yáng)極模式時(shí),應(yīng)將輸入信號(hào)的電源正極連接到公共端,將輸入信號(hào)連接到對(duì)應(yīng)的信號(hào)端子,信號(hào)低電平有效,此時(shí)對(duì)應(yīng)的內(nèi)部光耦導(dǎo)通,控制信號(hào)輸入驅(qū)動(dòng)器中;對(duì)應(yīng)共陰極模式時(shí),將輸入信號(hào)的電源負(fù)極連接到公共端,信號(hào)高電平有效,我們采用的是共陽(yáng)極接法。
控制步進(jìn)電機(jī)驅(qū)動(dòng)器的時(shí)序如圖2所示。
2 步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)
Linux內(nèi)核結(jié)構(gòu)體系可分為:應(yīng)用程序、庫(kù)函數(shù)、操作系統(tǒng)(內(nèi)核)、驅(qū)動(dòng)程序。在Linux操作系統(tǒng)中,驅(qū)動(dòng)程序是操作系統(tǒng)內(nèi)核與硬件設(shè)備的直接接口,驅(qū)動(dòng)程序屏蔽了硬件的細(xì)節(jié),驅(qū)動(dòng)程序是內(nèi)核的一部分,它具有以下功能:
對(duì)設(shè)備初始化和釋放:比如向內(nèi)核注冊(cè)這個(gè)程序,這樣應(yīng)用程序傳入文件名時(shí),內(nèi)核才能找到相應(yīng)的驅(qū)動(dòng)程序。
對(duì)設(shè)備進(jìn)行管理,包括實(shí)時(shí)參數(shù)設(shè)置以及提供對(duì)設(shè)備的操作接口。
讀取應(yīng)用程序傳送給設(shè)備文件的數(shù)據(jù)并回送給應(yīng)用程序請(qǐng)求的數(shù)據(jù)。
檢測(cè)是處理設(shè)備出現(xiàn)的錯(cuò)誤。
如圖3所示,應(yīng)用程序通過(guò)Linux系統(tǒng)的調(diào)用實(shí)現(xiàn)與內(nèi)核通信。由于Linux中將設(shè)備當(dāng)做文件處理,所以對(duì)設(shè)備進(jìn)行操作的調(diào)用和對(duì)文件操作的操作類似,主要包括open()、read()、write()、ioctl()、close()等接口函數(shù)。應(yīng)用程序發(fā)出系統(tǒng)調(diào)用命令后,會(huì)從用戶態(tài)轉(zhuǎn)到內(nèi)核態(tài),通過(guò)內(nèi)核將openO等的系統(tǒng)調(diào)用轉(zhuǎn)換成對(duì)物理設(shè)備的操作。在Linux中通過(guò)分層實(shí)現(xiàn)對(duì)物理設(shè)備的調(diào)用,這樣使得內(nèi)核的結(jié)構(gòu)清晰,提高了模塊化的獨(dú)立性。

2.1 嵌入式Linux設(shè)備驅(qū)動(dòng)程序的框架
Linux系統(tǒng)設(shè)備分成三種基本類型:字符設(shè)備、塊設(shè)備、網(wǎng)絡(luò)設(shè)備。每個(gè)模塊通常實(shí)現(xiàn)其中某一種:字符模塊、塊模塊或網(wǎng)絡(luò)模塊。
嵌入式設(shè)備驅(qū)動(dòng)整體可分以下兩部分:
(1)硬件設(shè)備接口層。這部分主要描述驅(qū)動(dòng)程序與設(shè)備的交互。
(2)驅(qū)動(dòng)與內(nèi)核接口層,它實(shí)現(xiàn)驅(qū)動(dòng)模塊在Linux內(nèi)核的注冊(cè)加載與卸除工作。
對(duì)于驅(qū)動(dòng)程序與內(nèi)核接口層,Linux提供了標(biāo)準(zhǔn)的入口點(diǎn)函數(shù)init_functionO;在通過(guò)模塊化的設(shè)計(jì)方法設(shè)計(jì)驅(qū)動(dòng)程序時(shí),使用insmod加載核心模塊時(shí)會(huì)調(diào)用本函數(shù),通知內(nèi)核對(duì)驅(qū)動(dòng)程序進(jìn)行注冊(cè)。模塊的卸除工作與加載工作類似,通過(guò)rmmod卸載模塊時(shí),調(diào)用cleanup_funct-ion0取消驅(qū)動(dòng)程序的注冊(cè)。
2.2 GPIO的步進(jìn)電機(jī)驅(qū)動(dòng)開(kāi)發(fā)
GPIO(General Purpose Input Output)的步進(jìn)電機(jī)驅(qū)動(dòng)可以歸類為L(zhǎng)inux設(shè)備驅(qū)動(dòng)的字符設(shè)備驅(qū)動(dòng),以下是開(kāi)發(fā)它的一些具體步驟。
2.2.1 開(kāi)發(fā)步驟
(1)模塊化驅(qū)動(dòng)程序
寫(xiě)字符設(shè)備的驅(qū)動(dòng)程序時(shí),也要遵守模塊化編程的一般規(guī)范。設(shè)備模塊在用戶空間的初始化和終止:
Init_mnodule()向內(nèi)核注冊(cè)模塊提供數(shù)據(jù)結(jié)構(gòu)、局部和全局變量。
Cleanup_module()取消所有init_module在內(nèi)核中的注冊(cè)。
(2)設(shè)備模塊在內(nèi)核空間的內(nèi)存申請(qǐng)和釋放
kmalloc()函數(shù)分配一段內(nèi)存,這樣就實(shí)現(xiàn)了Chrdevs向量表中指向設(shè)備驅(qū)動(dòng)程序名稱的指針。使用kfree釋放內(nèi)存。
(3)字符設(shè)備主設(shè)備號(hào)和次設(shè)備號(hào)的分配
主設(shè)備號(hào)標(biāo)志設(shè)備對(duì)應(yīng)的驅(qū)動(dòng)程序,內(nèi)核利用主設(shè)備號(hào)將設(shè)備與相應(yīng)的驅(qū)動(dòng)程序?qū)?yīng)起來(lái)。主設(shè)備號(hào)的取值范圍是O~255,如果不善加規(guī)劃,則容易造成主設(shè)備號(hào)的沖突。
次設(shè)備號(hào)由驅(qū)動(dòng)程序使用,內(nèi)核的其他部分并不使用它,僅將它傳遞給驅(qū)動(dòng)程序。
(4)設(shè)備模塊在內(nèi)核空間的注冊(cè)與注銷
字符設(shè)備的注冊(cè)有兩種方法,一種是常用注冊(cè)方法,通過(guò)系統(tǒng)函數(shù)registel_chrdev()將設(shè)備加入到系統(tǒng)設(shè)備列表中;另一種是devfs技術(shù),通過(guò)系統(tǒng)函數(shù)devfs-regisrer()實(shí)現(xiàn)設(shè)備的注冊(cè)。注銷與注冊(cè)相反,分別調(diào)用unregister_chrdev()函數(shù)和devfs_unregister()函數(shù)。
(5)設(shè)備模塊在內(nèi)核空間提供系統(tǒng)調(diào)用的函數(shù)設(shè)備驅(qū)動(dòng)程序在注冊(cè)成功以后,用戶可以通過(guò)訪問(wèn)設(shè)備特殊文件(一般情況在/dev目錄下)實(shí)現(xiàn)系統(tǒng)調(diào)用。
GPIO驅(qū)動(dòng)程序只需要一個(gè)file operations數(shù)據(jù)結(jié)構(gòu)體就可以了。
2.2.2 驅(qū)動(dòng)開(kāi)發(fā)
要寫(xiě)實(shí)際的驅(qū)動(dòng),就必需了解相關(guān)的硬件資源。比如:用到的寄存器、物理地址、中斷等。在這里,它用到如下硬件資源,如表2所示。

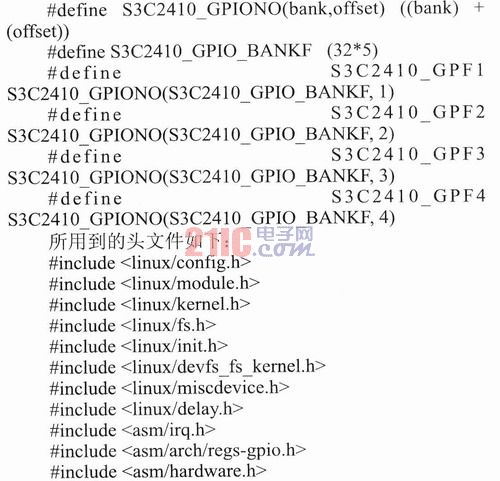
要用操作所用到的IO口,就要設(shè)置他們所用到的寄存器,我們需要調(diào)用一些現(xiàn)成的函數(shù)或者宏,比如:
/*每個(gè)port有16個(gè)引腳,而每個(gè)引腳由兩位來(lái)配置,所以你看到32×N。 32表示一個(gè)port的配置寄存器,而N代表是第幾個(gè)端口。而這里的offset表示的是第幾個(gè)引腳。*/
S3C2440開(kāi)發(fā)板中GPIO的許多引腳是和地址線、數(shù)據(jù)線、串口線等引腳復(fù)用的。所以我們必須對(duì)GPIO進(jìn)行重新定義和配置。一般來(lái)說(shuō),寫(xiě)驅(qū)動(dòng)可以在內(nèi)核中找相近的驅(qū)動(dòng)程序,以它為模板進(jìn)行開(kāi)發(fā),有時(shí)也要從零開(kāi)始,這次作者在內(nèi)核Linux-2.6.13-qq2440\kernel2.6.13\drivers\char中的qq2440 led.c進(jìn)行修改。

最后定義了file_operations和各種API函數(shù),配置了init和exit函數(shù)以及module_exit和module_init。
驅(qū)動(dòng)開(kāi)發(fā)完后,要進(jìn)行測(cè)試。把編寫(xiě)好的驅(qū)動(dòng)程序在PC機(jī)上進(jìn)行交叉編譯。然后用命令#insmod stepper.ko加載模塊到內(nèi)核中,通過(guò)命令#rmmod stepper.ko可以卸載模塊。用mknod/dev/stepper 1000 0建立與驅(qū)動(dòng)程序相應(yīng)的設(shè)備節(jié)點(diǎn)。編寫(xiě)相應(yīng)的應(yīng)用程序。在應(yīng)用程序中打開(kāi)步進(jìn)電機(jī)的設(shè)備文件,通過(guò)調(diào)用ioctl(fd,1&dir,O),運(yùn)行應(yīng)用程序,查看步進(jìn)電機(jī)的轉(zhuǎn)向。
3 結(jié)論
本文在S3C2440開(kāi)發(fā)板下實(shí)現(xiàn)了步進(jìn)電機(jī)的控制。給出了簡(jiǎn)單的驅(qū)動(dòng)程序,實(shí)驗(yàn)結(jié)果表明驅(qū)動(dòng)運(yùn)行正常、穩(wěn)定。但對(duì)于實(shí)現(xiàn)傳能激光雕刻的圖形及灰度雕刻,還有待于進(jìn)一步的完善。