
摘? 要: 吸取PID算法的基本思想,利用PLL的高精度和高靈敏度,從時域調(diào)參的角度提出了一種新的前端控制回路——PPLID控制回路,并介紹了其在FIRA機(jī)器人小車控制系統(tǒng)" title="控制系統(tǒng)">控制系統(tǒng)中的應(yīng)用。
關(guān)鍵詞: 鎖相" title="鎖相">鎖相積分環(huán)? PID? PLL? PPLID? 全功率" title="全功率">全功率提前補(bǔ)償
?
1 對PID的新需求
PID算法具有結(jié)構(gòu)簡單、物理意義清晰、便于實(shí)現(xiàn)的優(yōu)點(diǎn),因而成為當(dāng)前工程應(yīng)用中最普遍和最經(jīng)典的控制算法。但是參數(shù)整定" title="參數(shù)整定">參數(shù)整定一直以來都困擾著工程技術(shù)人員。
一方面,由于PID算法常用于前端控制回路,因而在一個較大的系統(tǒng)中往往有幾十乃至幾百個PID回路,這使得參數(shù)調(diào)整十分繁瑣。若各個回路間存在耦合關(guān)系,則工作量更是難以預(yù)計(jì)。
另一方面, PID算法的應(yīng)用場合十分廣泛,而不同場合的控制參數(shù)卻又不盡相同,因此針對某個被控對象設(shè)計(jì)的PID電路很難適應(yīng)另一個被控對象的要求。這使得PID控制系統(tǒng)長期停留在通用算法的層次,難以提升為價格低廉的通用IC。隨著EDA工具的發(fā)展,SOC的市場需求日益增長,算法集成化的趨勢日益明顯,在工業(yè)控制領(lǐng)域的表現(xiàn)之一就是對通用PID集成電路的需求越來越強(qiáng)烈。
上述兩方面使得PID的廣泛應(yīng)用和參數(shù)整定過于繁瑣的矛盾日益突出。要解決這個矛盾,實(shí)現(xiàn)PID算法集成化,必須找到一個簡便靈活的參數(shù)整定方法。
同時,隨著工業(yè)控制對精度和抗干擾的要求越來越高,高頻微擾的問題日益突出。經(jīng)典PID算法采用積分前置的方法來減小高頻微擾的問題。但由于積分效應(yīng),必然削弱微分的預(yù)測補(bǔ)償能力,從而影響系統(tǒng)的精度和靈敏度。采用新的方法克服高頻微擾,也是一個亟待解決的問題。
2 PLL與PID結(jié)合對性能的改善
PLL在頻率合成、通信以及標(biāo)準(zhǔn)信號發(fā)生器中被廣泛應(yīng)用,具有一整套成熟的理論,是相當(dāng)經(jīng)典的電路,其高靈敏度和高精度已被理論和實(shí)踐證明。可將PID和PLL有機(jī)地結(jié)合起來,利用PLL的優(yōu)異性能改進(jìn)傳統(tǒng)PID電路。
2.1 PLL與PID結(jié)合構(gòu)成PPLID
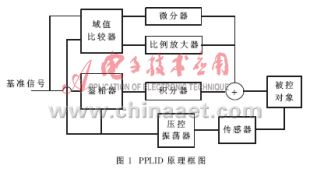
PLL本身可以看成一個鎖相積分環(huán)。其中的鑒相器" title="鑒相器">鑒相器承擔(dān)了差值計(jì)算和相位跟蹤的任務(wù)(計(jì)算標(biāo)準(zhǔn)信號與反饋信號的相位差);積分器則不僅完成了積分功能,還肩負(fù)著保持當(dāng)前狀態(tài)的任務(wù);而壓控振蕩器(VCO)則負(fù)責(zé)將被控對象信息反饋回鑒相器[2]。可見,這個環(huán)路已經(jīng)具備了差值計(jì)算和積分的功能,只要再配以比例和微分調(diào)節(jié),就構(gòu)成了一個新穎的控制回路。由于其中含有鎖相積分回路,因此稱其為PPLID(Proportional, Phase-Locked-Integral and Differential Controller,即比例、鎖相積分、微分控制器),其原理如圖1所示。
?
?
??? 其中的核心部件是鎖相積分環(huán),實(shí)際上就是一個PLL,代替PID中的積分器和減法器。若差值大于一定域值,則啟動微分和比例調(diào)節(jié);若差值小于域值,則只有鎖相積分器處于工作狀態(tài),由它完成精細(xì)調(diào)節(jié)。基準(zhǔn)信號就是控制量,這里它表現(xiàn)為頻率波形。
PPLID吸收了經(jīng)典PID的基本思想,因此可應(yīng)用于經(jīng)典PID回路所能涉及的所有領(lǐng)域,其優(yōu)越性表現(xiàn)在以下四個方面:
①利用鑒相器作差值運(yùn)算,大大提高了PPLID的靈敏度和精度。
鑒相器可以采取邊沿對齊的方式來實(shí)現(xiàn)相位跟蹤,即標(biāo)準(zhǔn)脈沖信號和反饋脈沖信號都輸入鑒相器。只要邊沿不對齊,則鎖相積分環(huán)就會設(shè)法調(diào)整被控對象,直到二者的邊沿完全對齊。因此,鎖相環(huán)的靜態(tài)精度和靈敏度非常高。
②PPLID中積分器的平均積分時間很短。
鑒相器計(jì)算出來的相位差最終是通過積分器轉(zhuǎn)變?yōu)殡妷褐苯虞敵龅奖豢貙ο笊系摹R簿褪钦f,積分器能夠根據(jù)相位差決定在當(dāng)前累積電壓的基礎(chǔ)上將電壓調(diào)高或調(diào)低多少。由于鑒相器的高靈敏度使得相位稍有偏離便開始調(diào)整,因此積分器每次將電壓調(diào)高或調(diào)低得很小,從而在很短的時間內(nèi)就能完成調(diào)整工作。即鎖相積分器的平均積分時間是很短的。
③PPLID利用微分和比例調(diào)節(jié)可以實(shí)現(xiàn)全功率提前補(bǔ)償。
控制系統(tǒng)多處于微擾環(huán)境中,但有時會出現(xiàn)沖擊干擾,差值會瞬間變得很大,僅依靠鎖相積分環(huán)就不能足夠快地收斂到目標(biāo)值。這時可以啟用微分和比例調(diào)節(jié),對被控對象進(jìn)行全功率提前補(bǔ)償。這里的全功率指的是采用最高電壓或最大電流對被控對象進(jìn)行補(bǔ)償,因此這種提前補(bǔ)償?shù)某掷m(xù)時間不會很長,只要偏差小于某個閾值,便立即停止,從而將精細(xì)調(diào)整的工作交給鎖相積分環(huán)來完成。
④PPLID可用于高精度控制。
????由于嵌入了PLL,因此PPLID繼承了PLL回路的高精度特性,完全能勝任要求高精度控制的任務(wù),成本也十分低廉。
2.2 PPLID對傳統(tǒng)PID回路性能的改善
2.2.1 對高頻微擾適應(yīng)能力的改善
如前所述,PPLID具有靈敏度高和平均積分時間短的特點(diǎn),稍有偏差便進(jìn)行小幅調(diào)整,因此對高頻微擾具有天然的自適應(yīng)能力。
同時,由于微分器只在沖擊干擾時才會啟用,在高頻微擾情況下是停止工作的,因此不存在高頻微擾對微分器產(chǎn)生影響的問題。
2.2.2 對PID參數(shù)整定的簡化
PPLID對PID參數(shù)整定的第一個簡化是免去了微分和比例調(diào)節(jié)系數(shù)的調(diào)整。
在PPLID中,只有當(dāng)差值大于閾值時才會啟動微分和比例調(diào)節(jié),進(jìn)行全功率提前補(bǔ)償。當(dāng)差值小于某個值時,則立即停止微分和比例調(diào)節(jié),從而將精細(xì)調(diào)節(jié)的任務(wù)交由PLL承擔(dān)。可見,PLLID中的比例和微分調(diào)節(jié)并不負(fù)責(zé)精細(xì)調(diào)節(jié),只負(fù)責(zé)將大幅度的偏差縮小到一定范圍內(nèi),因此其系數(shù)對精度是無關(guān)緊要的。這樣就免去了微分和比例系數(shù)的調(diào)整。
參數(shù)整定的第二個簡化是對積分系數(shù)的要求大大寬松了。這種寬松性表現(xiàn)為:只要鎖相積分器的延時小于被控對象的反應(yīng)延時,環(huán)路就能夠糾偏,而且能夠及時精確地糾偏。說它能夠糾偏是因?yàn)椴扇∵呇貙R方式的PLL,其捕捉范圍并不依賴于積分器的延時常數(shù)[3],這意味著在小幅振蕩的情況下,鎖相積分環(huán)的收斂性與積分常數(shù)的關(guān)聯(lián)很小,只要保證環(huán)路對輸出控制量(即積分器的輸出)的調(diào)整速度快于被控對象的變化,就能夠穩(wěn)定在目標(biāo)控制量。顯然決定環(huán)路調(diào)整快慢的是最長延時單元,也就是積分器,只要其積分延時小于被控對象的反映延時,環(huán)路就能糾偏。說它能及時精確地糾偏是因?yàn)殍b相器的高精度和高靈敏度使得鎖相積分環(huán)的平均積分時間很短,這意味著在偏差很小的情況下,環(huán)路能立即進(jìn)行調(diào)整。
??? 在控制系統(tǒng)中,被控對象多為機(jī)械運(yùn)動或溫度、壓力和流量等物理變化。其反應(yīng)延時一般總大于積分器的延時,因此要調(diào)整積分延時使其小于被控對象的反應(yīng)延時是十分簡便的。
由上可見,PLL與PID相結(jié)合,參數(shù)整定實(shí)際上就歸結(jié)為延時參數(shù)的調(diào)整。這種調(diào)整無需在Z域進(jìn)行分析,只要在時域直接進(jìn)行即可(對于積分器,即調(diào)整電容和電阻值),這樣就大大簡化了參數(shù)整定。
參數(shù)整定的簡化,不僅提高了PID回路的調(diào)試效率,而且為設(shè)計(jì)價格低廉的集成PPLID電路提供了可能。整個電路唯一需要根據(jù)工作環(huán)境進(jìn)行調(diào)整的就是積分器的延時參數(shù),只要將積分器留給用戶調(diào)整,就能使得芯片應(yīng)用于多種場合。
3 PPLID在FIRA中的應(yīng)用
在FIRA足球機(jī)器人小車的前端控制器中應(yīng)用了PPLID回路,取得了較好的效果。其實(shí)現(xiàn)如圖2所示(這里只提供了小車左輪的電路,右輪與此對稱)。由于傳感器返回的信號是頻率信號,可以直接輸入到鑒相器的反饋端,因此無需使用壓控振蕩器。
?

?
3.1 AVR單片機(jī)
本系統(tǒng)采用ATMEL公司AVR系列單片機(jī)中的AT90S8515作為前端控制器,它除了產(chǎn)生標(biāo)準(zhǔn)信號、管理與上位機(jī)的無線通信、實(shí)現(xiàn)動態(tài)控制算法外,還擔(dān)負(fù)PPLID中的閾值比較、啟用和關(guān)閉微分調(diào)節(jié)等任務(wù)。
3.2 鎖相積分回路
鎖相積分回路就是一個PLL,其鑒相功能直接由CD4046的比較器Ⅱ?qū)崿F(xiàn),最高工作頻率可達(dá)1.4MHz。PLL內(nèi)部集成了兩個相位比較器Ⅰ和Ⅱ,這里使用的是相位比較器II。它是一個由信號的上升沿控制的數(shù)字存儲網(wǎng)絡(luò),對輸入信號占空比的要求不高,允許輸入非對稱波形,具有很寬的捕捉頻率范圍,而且不會鎖定在輸入信號的諧波上。當(dāng)進(jìn)入鎖定狀態(tài)時,能保證兩個輸入信號之間的相移為0(關(guān)于CD4046的詳細(xì)介紹見參考文獻(xiàn)[3])。積分器電路采用如圖3所示的超前滯后網(wǎng)絡(luò)。其傳遞函數(shù)為:
G(s)=(1+τ2·s)/(1+τ1·s)
?

其中,τ1=(R1+R2)·C1,τ2=R2·C1
通過選擇合適的R1,R2和C1的值,就可以在一定范圍內(nèi)設(shè)定時間常數(shù)。由于存在電機(jī)慣性,因而采用超前滯后濾波器且超前時間常數(shù)大于滯后時間常數(shù),系統(tǒng)將獲得很好的穩(wěn)定性。
3.3 支援驅(qū)動器
支援驅(qū)動器采納了微分調(diào)節(jié)的基本思想。微分調(diào)節(jié)實(shí)際上就是根據(jù)差值的變化來預(yù)計(jì)被控對象的變化,在本例中就是根據(jù)差值的大小,來預(yù)測當(dāng)前電機(jī)轉(zhuǎn)速的偏離是否能夠快速收斂。如果單靠鎖相環(huán)不能快速收斂,則支援驅(qū)動器啟動,快速提高或降低電機(jī)控制電壓,進(jìn)行全功率提前補(bǔ)償;當(dāng)差值小于閾值時,便由鎖相積分環(huán)來完成精細(xì)調(diào)節(jié)。
3.4 測 速
電機(jī)轉(zhuǎn)速由光電碼盤測出,輸出的脈沖信號直接作為CD4046的一個輸入信號,與標(biāo)準(zhǔn)信號相比較。同時該信號也要提供給AVR,以便比較差值是否超過閾值。
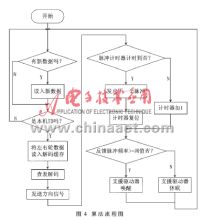
控制系統(tǒng)的算法可參照圖4所示的流程圖。
?
?
??? PPLID控制回路中采用的基本信號參量是頻率或相位,根據(jù)調(diào)頻或調(diào)相通信的原理,這種信號抗干擾能力強(qiáng),適合遠(yuǎn)距離傳輸,而且便于實(shí)現(xiàn)數(shù)字無線通信。相信PPLID在分布式控制系統(tǒng)中將大有作為。
?
參考文獻(xiàn)
1 D.F.Geiger.Phase Locked Loops for DC Motor——Speed?Control(M).John Wiley & Sons, 1981
2 周雪琴,安 錦.計(jì)算機(jī)控制系統(tǒng).西安:西北工業(yè)大學(xué)出版社,1998.2
3 戴逸民.頻率合成與鎖相技術(shù).合肥:中國科學(xué)技術(shù)大學(xué)出版社,1995.2
4 沈 雷.CMOS集成電路原理及應(yīng)用.北京:光明日報(bào)出版社,1986.8
5 耿德根,宋建國,馬 潮,葉勇建.AVR高速嵌入式單片機(jī)原理與應(yīng)用.北京:北京航空航天大學(xué)出版社,2001.2
6 陳隆昌,閻治安,劉新正.控制電機(jī)(第三版).西安:西安電子科技大學(xué)出版社,2000.5