
直流電機(jī)由于具有速度控制容易,啟、制動性能良好,且在寬范圍內(nèi)平滑調(diào)速等特點(diǎn)而在冶金、機(jī)械制造、輕工等工業(yè)部門中得到廣泛應(yīng)用。在這些場合常需要通用、可靠性高、成本低、負(fù)載能力強(qiáng)、應(yīng)用簡單的直流調(diào)速模塊,而且某些時(shí)候可進(jìn)行遠(yuǎn)程操作。本文針對常見調(diào)速應(yīng)用,采用可控硅做為調(diào)速元件,采用EPM570T100C5設(shè)計(jì)和實(shí)現(xiàn)了一個(gè)通用直流調(diào)速模塊,為實(shí)現(xiàn)遠(yuǎn)距離控制內(nèi)置了RS 485通信和簡單通信協(xié)議。采用EPM570T100C5作為控制核心,電路簡潔,輸出控制脈沖精確,硬件實(shí)現(xiàn)相對單片機(jī)程序可靠性高、實(shí)時(shí)性好。
1 系統(tǒng)設(shè)計(jì)
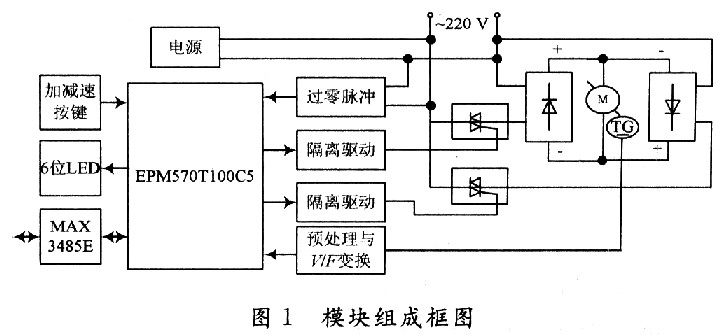
模塊組成框圖如圖1所示。主回路可控元件選用雙向可控硅,成本低、控制電路簡單、調(diào)壓方便可靠。為實(shí)現(xiàn)電機(jī)雙向運(yùn)行,采用兩組反并聯(lián)的整流單元。雙向可控硅調(diào)壓后經(jīng)橋式整流模塊變換成直流電,輸出給電動機(jī)進(jìn)行調(diào)壓調(diào)速。調(diào)壓采用移相方式,所以設(shè)計(jì)了電源過零脈沖形成電路。為增加模塊可靠性,強(qiáng)電與弱電全部用光電耦合器隔離;雙向可控硅單元內(nèi)有簡單的RC緩沖電路,用以抑制du/dt。考慮到某些應(yīng)用場合需要遠(yuǎn)程控制,增加了RS 485通信單元,用MAX3485E芯片進(jìn)行電平轉(zhuǎn)換。測速選用直流測速發(fā)電機(jī),相對于光電編碼器更經(jīng)濟(jì),測速發(fā)電機(jī)輸出的直流電壓經(jīng)降壓、濾波預(yù)處理后進(jìn)行V/F變換。6位LED顯示當(dāng)前速度。電源電路為整個(gè)系統(tǒng)提供+3.3 V電源。
查看原圖(大圖)
主控芯片EPM570T100C5是Altera的MAXⅡ系列低成本的復(fù)雜可編程邏輯器件((2PLD)產(chǎn)品,其密度高且性能優(yōu)良,內(nèi)置用戶非易失性 FLASH存儲器塊,內(nèi)部時(shí)鐘頻率高達(dá)300 MHz,100腳MBGA封裝,570個(gè)邏輯單元(LE)。MAXⅡ器件具有創(chuàng)新的查找表(LUT)邏輯結(jié)構(gòu),突破了傳統(tǒng)宏單元器件的成本和功耗限制。設(shè)計(jì)人員可以利用MAXⅡ器件來替代低密度FPGA,ASSP和標(biāo)準(zhǔn)邏輯器件,支持在系統(tǒng)編程(ISP),很容易在現(xiàn)場重新進(jìn)行配置。使用 EPM570T100C5開發(fā)調(diào)速裝置,大大降低了系統(tǒng)功耗、體積和成本。另外,Altera提供免費(fèi)的QuartusⅡ基礎(chǔ)版軟件,支持所有MAXⅡ器件,它是基于MAXⅡ器件引腳鎖定式裝配和性能優(yōu)化而設(shè)計(jì)的。
查看原圖(大圖)
2 可控硅調(diào)壓調(diào)速原理
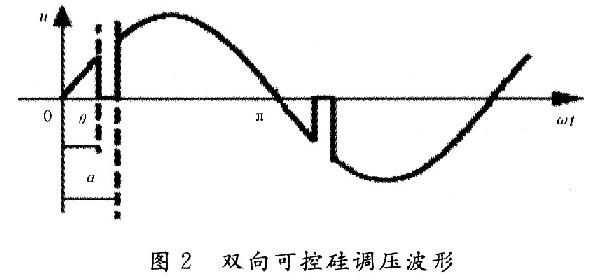
移相觸發(fā)就是通過改變晶閘管每周期導(dǎo)通的起始點(diǎn)即觸發(fā)延遲角α的大小,達(dá)到改變輸出電壓、功率的目的。圖2給出了雙向可控硅調(diào)壓波形,電源電壓![]() ;α為移相角;θ為導(dǎo)通角。輸出電壓與控制角關(guān)系見式(1),移相范圍 φ≤α≤π。
;α為移相角;θ為導(dǎo)通角。輸出電壓與控制角關(guān)系見式(1),移相范圍 φ≤α≤π。
查看原圖(大圖)
式中:α和θ滿足![]() ;負(fù)載阻抗角為φ=arctan(ωL/R);L為主回路總電感;R為主回路總電阻。
;負(fù)載阻抗角為φ=arctan(ωL/R);L為主回路總電感;R為主回路總電阻。
雙向可控硅輸出電壓整流后加到主電機(jī)電樞回路,構(gòu)成降壓調(diào)速系統(tǒng),調(diào)壓調(diào)速機(jī)械特性硬度不變,調(diào)速范圍大,能量損耗小。電壓與速度關(guān)系滿足式(2)的機(jī)械特性。

式中:U為電機(jī)電樞電壓,來自雙向可控硅輸出電壓U0;Ra為電樞回路電阻;T為電磁轉(zhuǎn)矩;φ為每極磁通;Ce為電動勢常數(shù);CT為轉(zhuǎn)矩常數(shù)。
設(shè)磁通保持不變,電樞電路中也沒有串聯(lián)可調(diào)外電阻,減小電動機(jī)電樞供電電壓時(shí),由于轉(zhuǎn)速不立即發(fā)生變化,反電動勢也暫不發(fā)生變化,此時(shí)電樞電流減小,轉(zhuǎn)矩也減小,若阻轉(zhuǎn)矩未變,則合成轉(zhuǎn)矩小于零,轉(zhuǎn)速下降,反電動勢減小,電樞電流和電磁轉(zhuǎn)矩也隨之增大,直到達(dá)到轉(zhuǎn)矩平衡時(shí)為止,但此時(shí)轉(zhuǎn)速已較原來的降低了。由于調(diào)速時(shí)磁通不變,故也為稱之恒轉(zhuǎn)矩調(diào)速。
3 FPGA核心設(shè)計(jì)
3.1 主模塊
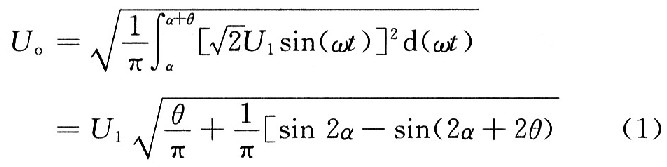
采用自頂向下的設(shè)計(jì)方法,主模塊原理圖如圖3所示。包括speed_detection為速度檢測、speed_control為速度控制、RS 485為串口通信、gate_control為主控子模塊4部分。speedpulse為V/F轉(zhuǎn)換后的速度脈沖信號;start和stop分別為起動和停止按鍵的輸入信號;inc和dec分別為加減速按鍵的輸入信號;zeroin為同步過零脈沖的輸入信號;rxd,txd,notre和de連接到RS 485接口芯片MAX3485E;alarm為超速報(bào)警信號;led0~led5為速度顯示6位數(shù)碼管的輸出信號;maincj為主接觸器的控制信號;redled和greenled分別為紅綠燈輸出信號;pulse I和pLalseⅡ?yàn)檎唇M雙向可控硅控制信號。
查看原圖(大圖)
速度檢測子模塊在單位時(shí)間內(nèi)對speedpulse計(jì)數(shù),得到速度值speedvalue,并經(jīng)過譯碼送到6位LED顯示。速度控制模塊根據(jù)設(shè)定速度和檢測速度用PID算法調(diào)節(jié)輸出脈沖,改變移相角來控制速度;設(shè)定速度為reg變量,可用inc和dec按鍵調(diào)節(jié),也可以來自RS 485模塊;根據(jù)速度設(shè)定值的正負(fù)得出direction信號,控制脈沖信號加在兩組雙向可控硅之一,使電機(jī)正反兩方向轉(zhuǎn)動。主控子模塊負(fù)責(zé)控制整個(gè)系統(tǒng)的起動和停止,復(fù)位各個(gè)子模塊,提供1 Hz,25 600 Hz,10 Hz脈沖信號。RS 485模塊負(fù)責(zé)通信管理、解析通信協(xié)議,從而接收16位速度設(shè)定值。
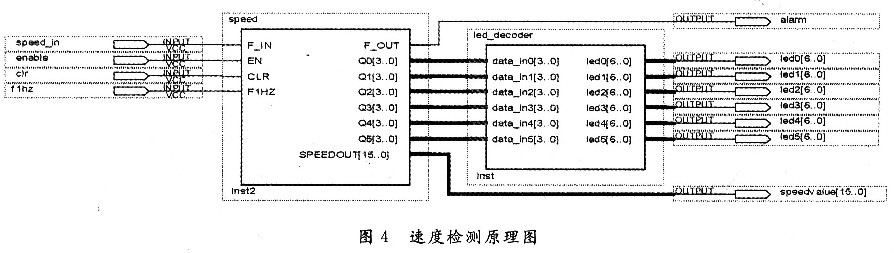
3.2 速度檢測
速度檢測模塊主要包括頻率計(jì)和譯碼電路,如圖4所示。enable為速度檢測使能信號,clr為輸出清零信號,speed_in為輸入速度脈沖信號,led0~led5為6位數(shù)碼管輸出信號。
查看原圖(大圖)
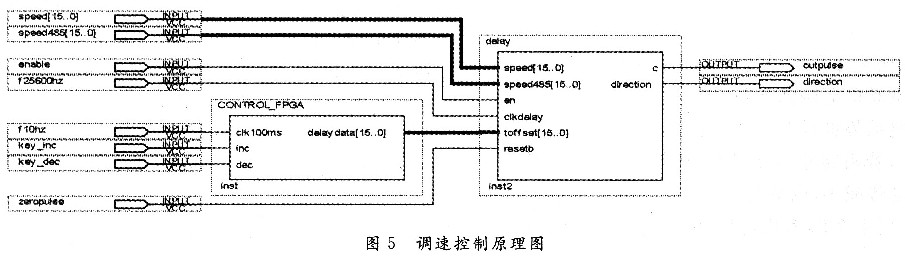
3.3 速度控制
速度控制的原理是根據(jù)設(shè)定速度與實(shí)際速度的偏差用PID算法產(chǎn)生控制量,根據(jù)控制量的大小把過零檢測脈沖移相后加寬作為輸出控制信號,如圖5所示。
查看原圖(大圖)
enable為輸入使能控制信號;f25600hz為決定移相單位時(shí)間的輸入信號;delay_flhz為按鍵加減的單位時(shí)間輸入信號;key_inc和 key_ dec分別為加速和減速按鍵的輸入信號;zeroin為輸入同步過零脈沖信號,頻率為100Hz;outpulse為輸出的移相脈沖信號;direction為轉(zhuǎn)向信號。
3.4 RS 485通信模塊
RS 485總線是一種多點(diǎn)差分?jǐn)?shù)據(jù)傳輸?shù)碾姎庖?guī)范,其通信接口允許在簡單的一對雙絞線上進(jìn)行多點(diǎn)雙向通信,具有噪聲抑制能力強(qiáng),高速數(shù)據(jù)傳輸,且電纜比較長及可靠性高的特點(diǎn)。
RS 485子模塊主要實(shí)現(xiàn)UART功能,并通過notre和de信號控制發(fā)送和接收。串行通信固定設(shè)為9 600波特、8位數(shù)據(jù)、無奇偶校驗(yàn)、1位停止位。數(shù)據(jù)格式:地址碼、數(shù)據(jù)、結(jié)束字符,其長度分別為8位、16位、8位。當(dāng)總線上掛接多個(gè)調(diào)速模塊時(shí),采用廣播方法發(fā)送消息,地址碼可根據(jù)實(shí)際情況約定。由于RS 485總線是異步半雙工的通信總線,一個(gè)時(shí)刻總線只可能呈現(xiàn)一種狀態(tài)。因此在空閑狀態(tài)時(shí),將RS 485總線始終設(shè)置為接收狀態(tài)。
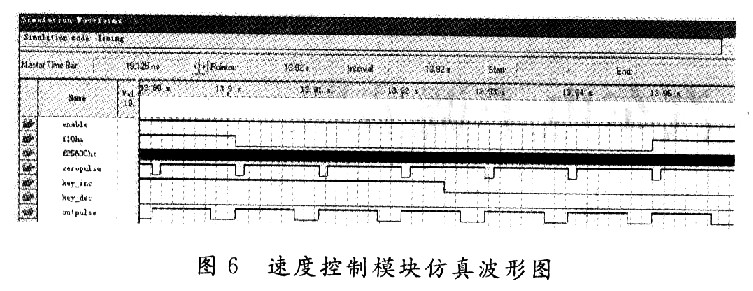
3.5 仿真
功能仿真又稱前仿真,其目的是檢查HDL代碼所描述的邏輯功能是否和預(yù)期的功能一致。全部模塊已在QuartusⅡ中仿真通過,圖6給出速度控制模塊功能仿真波形。仿真時(shí)間為30 s,假設(shè)期間實(shí)際速度為常數(shù),在3.9 s按下加速按鍵,使key_inc變?yōu)楦唠娖剑?0 s后(13.90 s時(shí)刻)加速按鍵釋放變?yōu)榈碗娖剑瑩?jù)圖6的仿真波形圖中可知,在13.90 s時(shí)刻,輸出脈沖下降沿相對于過零脈沖從180°向前移相約70°,表明移相調(diào)速功能正常。
查看原圖(大圖)
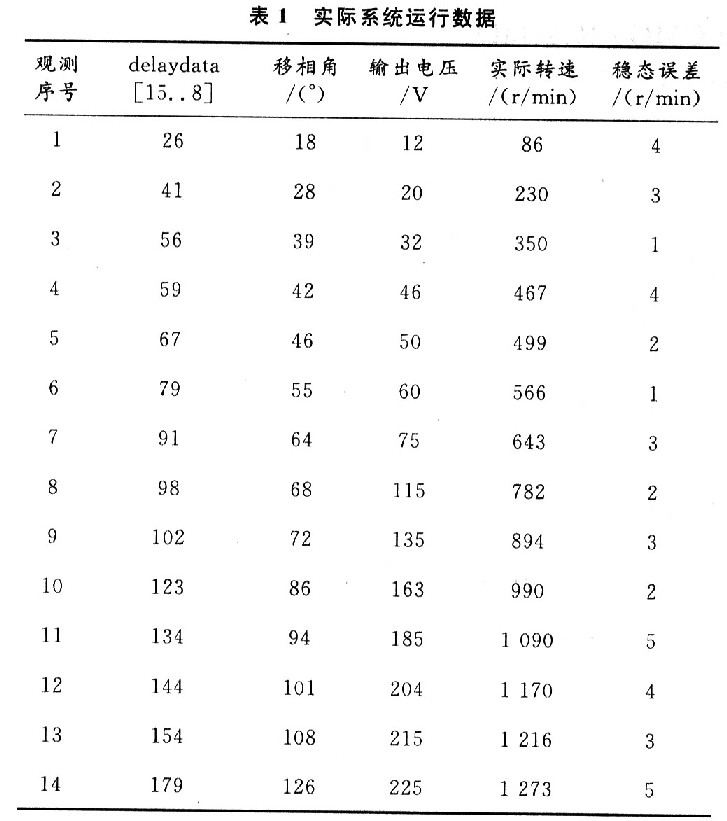
4 實(shí)際系統(tǒng)運(yùn)行數(shù)據(jù)
為調(diào)試和分析系統(tǒng)運(yùn)行狀況,測得如表1所示系統(tǒng)運(yùn)行數(shù)據(jù)。主電動機(jī)型號110ZF53,pN=100 W,UN=220 V,IN=0.50 A,1 600 rpm。 delaydata[15..8]是速度控制模塊中元件CONTROL FPGA的延時(shí),輸出數(shù)據(jù)高8位。
查看原圖(大圖)
從表1中數(shù)據(jù)看出,控制系統(tǒng)可有效、連續(xù)地調(diào)整電機(jī)速度,穩(wěn)態(tài)誤差較小,負(fù)載轉(zhuǎn)矩的變化使移相角與轉(zhuǎn)速之間呈非線性關(guān)系,但移相角與輸出電壓——對應(yīng)。
5 結(jié)語
該設(shè)計(jì)具有通用性、經(jīng)濟(jì)性、可靠性,是常規(guī)直流速度控制的較好解決方案。由于采用CPLD芯片作為控制核心,可方便地進(jìn)行各種改進(jìn)。若要進(jìn)一步提高控制性能,可以增加電流閉環(huán);或稍加改動,可以控制兩臺直流電機(jī)的單向運(yùn)行;可以實(shí)現(xiàn)組成分布式網(wǎng)絡(luò)控制系統(tǒng)等。