
0 引 言
在儀器儀表的設(shè)計制作中常要用到數(shù)碼管顯示,有時數(shù)碼管的數(shù)量還會很多。如果為每個數(shù)碼管都單獨設(shè)計驅(qū)動電路,一方面對MCU來說是一個不小的負擔(dān),另一方面大幅增加了電路板的面積成本。集成電路MAX7221單片可以驅(qū)動8位數(shù)碼管,并且可以進行級聯(lián)擴展,對于這個問題是一個較為妥善的解決方案。一般MAX7221與MCU的連接使用兩種方法:一是使用MCU的I/O口直接模擬通信所需要的時序,此法操作較為繁瑣,易出錯;二是使用UART串行口,這種方法的通信速率最高僅為11.52 Kb/s。介紹第三種方法,即MAX7221通過串行外設(shè)接口(Serial PeripheralInterface,SPI)與MCU連接,此法具有簡單和易于使用的特點,其通信速率理論上高達10 Mb/s。
1 SPI原理
SPI是一種由Motorola公司開發(fā)的高速、全雙工、同步串行通信接口。MCU通過它可以方便地連接到存儲器、A/D轉(zhuǎn)換器、D/A轉(zhuǎn)換器、實時時鐘日歷、LCD驅(qū)動器、傳感器、音頻芯片,甚至另一個MCU。由于SPI的成本低,實用性強,很多新推出的芯片都增加了對它的支持。
SPI以主從方式工作,這種模式通常有一個主機和一個或多個從機,使用4根信號線:主機輸出/從機輸入(MOSI)、主機輸入/主機輸出(MISO)、串行時鐘SCLK和外設(shè)片選(SS)。典型的點對點SPI通信連接如圖1所示。
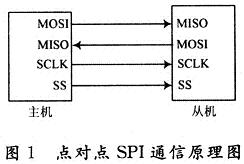
SPI與UART的一個重要的區(qū)別就是它是一個同步通信協(xié)議。主機中有一個時鐘發(fā)生器,可以在SCLK引腳上產(chǎn)生時鐘信號,所有的數(shù)據(jù)傳輸都按照這個同步時鐘來進行。主機和從機各有兩個移位寄存器分布在各自MOSI及MISO引腳,具體的傳輸過程就是由這幾個移位寄存器來完成的。以SS低電平有效為例,平時,主機維持SS為高電平,SCLK無信號;進行傳輸時,主機首先將SS引腳拉低作為從機的片選信號,然后在SCLK引腳上產(chǎn)生同步時鐘,需要發(fā)送或接收的數(shù)據(jù)就按照這個時鐘進入相應(yīng)的移位寄存器。主機的數(shù)據(jù)從主機的MOSI引腳移出,移入到從機的MISO引腳;從機的數(shù)據(jù)從從機的MOSI引腳移出,移人到主機的MI-SO引腳;傳輸結(jié)束后,主機將SS拉高。有多個從機時,主機的SS信號可以與從機的片選邏輯進行組合,沒有被選中的從機將不會參與SPI傳輸。
2 器件介紹
2.1 MAX7221
MAX7221是一款串行接口的數(shù)碼管顯示驅(qū)動器,單片最多可驅(qū)動8位數(shù)碼管。它包含有七段譯碼器、位和段驅(qū)動器、多路掃描器、段驅(qū)動電流調(diào)節(jié)器、亮度脈寬調(diào)節(jié)器及多個特殊功能寄存器。MAX7221不僅可以很方便地與MCU相連接,還可通過級聯(lián)進行擴展。它的主要功能特點有:
(1)10 MHz的串行接口;
(2)BCD譯碼/非譯碼模式選擇;
(3)耗電僅150 μA的關(guān)斷模式;
(4)數(shù)字和模擬雙重亮度控制;
(5)SPI,QSPI,Microwire等多種串行接口。
2.2 MCU
考慮了實用性、性能價格比等多種因素,實驗MCU選用ATmega128,它是一種基于AVR RISC結(jié)構(gòu)的8位低功耗CMOS微處理器,最高工作頻率為16 MHz。它采用了先進的指令集,絕大多數(shù)指令均為單周期指令,自帶128 KB的FLASH,可以通過SPI,JTAG、引導(dǎo)程序等多種方式多次編程,支持系統(tǒng)編程及調(diào)試。ATmega128的SPI接口最高工作頻率為主頻的50%,可達8 MHz(與MAX7221SPI口的速率上限相當)。該接口的工作方式(主/從)、時鐘極性、時鐘沿及工作頻率均可靈活配置。
3 硬件連接
圖2所示為4片級聯(lián)MAX7221通過SPI與ATmega128連接的電路圖。該系統(tǒng)最多可以驅(qū)動32位數(shù)碼管。由于數(shù)據(jù)是單向傳輸,因此將ATmega128配置為主機,MAX7221配置為從機,可以省略從機向主機傳輸數(shù)據(jù)的線路。在這種級聯(lián)連接方式中,所有MAX7221的CS都連接在一起,其片選是通過在要傳輸?shù)臄?shù)據(jù)前增加空操作指令來實現(xiàn)的。
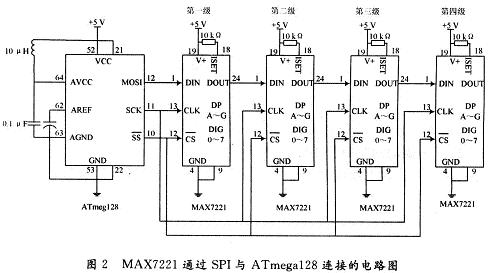
例如,要向第二級的MAX7221傳輸數(shù)據(jù),應(yīng)當在時序到來之后首先傳輸一個空操作指令(0X0000),然后再傳輸數(shù)據(jù)。要向第三級的MAX7221傳輸數(shù)據(jù)時,要先傳輸兩個空操作指令,以此類推。值得一提的是,如果要用這種級聯(lián)方式設(shè)計個數(shù)不是8的整數(shù)倍的數(shù)碼管顯示驅(qū)動器,必須要為各個MAX7221分配平均的掃描位數(shù)。
例如,如果需要12位數(shù)碼管顯示,那么采用兩級級聯(lián)驅(qū)動,每個MAX7221驅(qū)動6個數(shù)碼管;如果需要11位數(shù)碼管顯示,那么一級驅(qū)動6個,一級驅(qū)動5個,但掃描限位仍然都設(shè)定為6,只將其中一個空接。這么做是因為MAX7221對8位數(shù)碼管的掃描能力是一定的,在相同亮度的等級下需要進行掃描的數(shù)碼管個數(shù)越多,數(shù)碼管看上去就越暗。如果各級MAX7221設(shè)定的掃描限位不一致,盡管設(shè)定了相同的亮度等級,實際顯示的亮度也會有所差別。
4 軟件設(shè)計
圖3是MAX7221的SPI傳輸時序圖。

根據(jù)MAX7221的SPI時序圖及寄存器地址表,可以編制出相應(yīng)的ATmega128 SPI子程序。SPI_init()用于初始化ATmega128的SPI口,設(shè)定時鐘極性和頻率等參數(shù);SPI_transmit()用于在時序到來時連續(xù)傳輸16位數(shù)據(jù);MAX7221_transmit()用于總體完成從CS被拉低到數(shù)據(jù)傳輸結(jié)束的全過程,并將級聯(lián)情況也考慮了進去。


需要注意的一點是MAX7221一上電就進入到關(guān)斷模式,所驅(qū)動的數(shù)碼管無任何顯示,必須首先退出該模式進入到正常工作模式。相應(yīng)的子程序如下:


5 實 驗
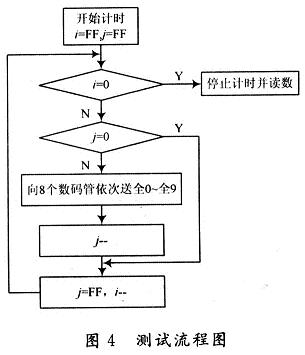
實驗中使用上述級聯(lián)系統(tǒng)的軟硬件進行了32位數(shù)碼管循環(huán)顯示測試,結(jié)果正常。此外,還利用AT-mega128自帶的定時器對第一級的MAX7221進行速率測試,流程如圖4所示。一共進行20次測試,最終定時器的平均讀數(shù)為1 430 ms。據(jù)此可計算出數(shù)據(jù)傳輸?shù)乃俾?img alt="公式" border="0" height="52" hspace="0" src="http://files.chinaaet.com/images/20100816/fc490829-533c-47f8-b5ab-d9ffaada9a63.jpg" width="379" />該速率未能達到理論上的8 Mb/s,其原因是進入和退出函數(shù)、循環(huán)以及對SS的拉低和置高都耗費了MCU的有效時間。可以推斷,提高在MCU的頻率時MAX7221的SPI傳輸速率還可進一步提高。
6 結(jié) 語
實驗證明,MAX7221僅需3線即可通過SPI與MCU連接。這種SPI通信法不但通信速率高,還可用于級聯(lián)的MAX7221系統(tǒng),以驅(qū)動更多的數(shù)碼管。