
1 引言
微波以它的獨特的功能開拓運用領(lǐng)域的新技術(shù),其中包括微波通信,微波測量,微波加熱等新技術(shù)。微波能產(chǎn)生于微波源。它是由產(chǎn)生微波能的心臟——微波管和為微波管提供必要工作條件的電源組成。微波作為一種新的能量傳遞方式,在電子電氣行業(yè)中發(fā)展很快,其中大功率微波源常用于加熱及無極光燈的激勵源,為了更好地滿足應(yīng)用的需要,經(jīng)常需要功率控制。為達到無極紫外燈在微波的激發(fā)作用下,能夠產(chǎn)生連續(xù)可變的光源,并且能夠較好地克服技術(shù)性與經(jīng)濟性的矛盾,提高性價比,本文論述單片機微波功率控制技術(shù)。
2 芯片簡介
系統(tǒng)使用的pic16f873,采用靜態(tài)設(shè)計技術(shù)、高性能的哈佛結(jié)構(gòu)cpu和risc指令集,實現(xiàn)了低功耗和寬工作電壓范圍,提高了cpu的工作速度和效率。包含4k×14的程序閃存,192字節(jié)的數(shù)據(jù)隨機存儲器和128字節(jié)數(shù)據(jù)eeprom存儲器。其中i/o端口為端口a,b和c,具有13個中斷源,三個定時器,兩個ccp(捕捉器/比較器/pwm)模塊、一個看門狗電路、一個并行從屬端口psp,集成了8通道a/d轉(zhuǎn)換器。pic16f87x系列既有spi和i2c主串行通信端口,又有usart異步串行通信端口。
該芯片實現(xiàn)的主要功能:單片機用于協(xié)調(diào)外圍設(shè)備的數(shù)據(jù),地址和控制信號的傳送;完成對倍壓整流輸出電壓的采樣,a/d轉(zhuǎn)換以及與設(shè)定值比較;完成觸發(fā)脈沖的同步與發(fā)送;完成對擁護指令的識別以及對設(shè)備運行狀態(tài)的顯示。
3 系統(tǒng)設(shè)計
3.1 原理設(shè)計
mcu是系統(tǒng)的核心,完成信號處理以及對各個模塊進會諧調(diào)控制的任務(wù)。系統(tǒng)開機,單片機上電復(fù)位啟動,檢測鍵盤輸入動作后,單片機根據(jù)不同的指令去完成不同的動作。在調(diào)功指令下達后,單片機根據(jù)輸入數(shù)據(jù)計數(shù),觸發(fā)延時,并檢測過零脈沖,同時送顯示指令。觸發(fā)延時結(jié)束,觸發(fā)電路中的觸發(fā)脈沖就產(chǎn)生并維持一定強度與時間,使雙向晶閘管有效導(dǎo)通。磁控管工作后,由采樣電路采集陽極電壓信號,并與設(shè)定電壓比較后對觸發(fā)延時作一定的修正。同時檢測光強信息,使光強滿足用戶要求。通過這個過程,完成對無極燈放電的穩(wěn)定控制,有連續(xù)調(diào)節(jié)的功能,而且操作簡單,便于與用戶直接交流,易于用戶直接使用。系統(tǒng)結(jié)構(gòu)圖如圖1所示。
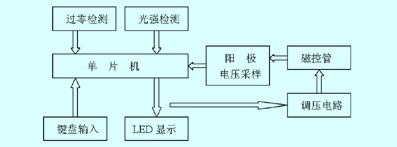
圖1 系統(tǒng)結(jié)構(gòu)圖
3.2 系統(tǒng)硬件設(shè)計
(1)升壓和整流的電路。磁控管腔體電壓一般要達到1800v才能工作,為此必須設(shè)計升壓變壓器來抬升電壓。采用兩個變壓器t1和t2并聯(lián)方式向倍壓整流電路供電。
當交流電為正半周時,二極管d2承受正壓導(dǎo)通對電容c2充電,直到達到交流電最大值 ;c1則處于放電過程,與t1次級線圈一起對磁控管供電。負半周則相反。其輸出平均電壓關(guān)系式為:
采用全波倍壓整流電路,其電路如圖2所示。
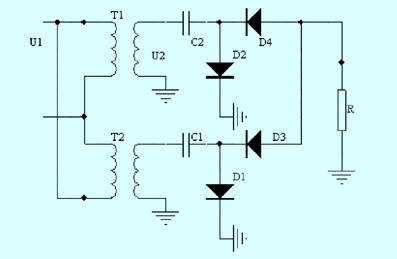
圖2 全波倍壓整流電路
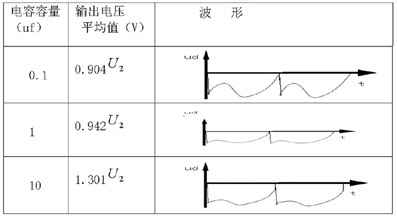
電容的取值較為重要,它直接影響電壓波形。為使波形平穩(wěn),且能夠滿足電壓調(diào)節(jié)的響應(yīng)速度,電容取值應(yīng)以電容在半個周期完成放電為依據(jù)。在此電路中,負載有電源內(nèi)阻(即次級繞組直流電阻)和磁控管總電阻約為300左右。以下采用不同電容值電壓平均值及其波形參見表1。
表1 不同電容值波形
(2)過零檢測電路。同步電路使用過零檢測方法通知單片機的同步時刻。陽極電壓(電流)反饋是重要的反饋,它很大程度上決定系統(tǒng)的準確性與穩(wěn)定壓,使用采樣電阻進行電流采樣。光強檢測應(yīng)用紫外線傳感器感應(yīng)無極燈光強大小。
為適時地給可控硅加觸發(fā)脈沖,控制導(dǎo)通角,必須時刻對交流電的相位進行檢測,為此專門設(shè)計一個電壓過零檢測器,如圖3所示。
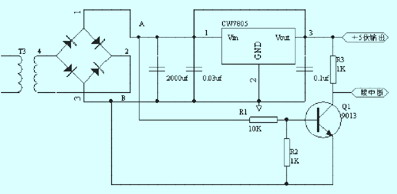
圖3 過零檢測器
a和b兩點輸出為全波整流后的脈動電壓,當電壓過零時,q1關(guān)閉,集電極電平為高,送到單片機中斷口斷出同步電壓的相位。
(3)觸發(fā)電路。觸發(fā)電路實現(xiàn)對磁控管腔電壓的控制,采用雙向可控硅器件控制變壓器原邊電壓。在控制極加一正或負電壓,使雙向可控硅導(dǎo)通。觸發(fā)電路如圖4所示。
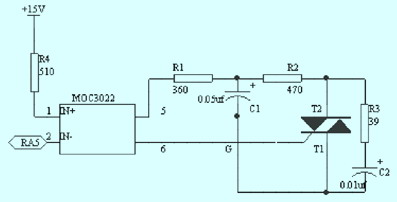
圖4 觸發(fā)電路
(4)其它功能模塊。
陽極電流反饋電路:磁控管工作時的通態(tài)電阻很少,因而陽極電壓稍微變化,將會引起磁控管陽極電流的很大變化,輸出功率亦會發(fā)生很大變化。為了穩(wěn)定功率的輸出,可采用單閉環(huán)反饋電路,它由陽極電流采樣和光電耦合隔離電路組成。
光強檢測電路:系統(tǒng)采用進口的uva、uvb(波長為260~370nm)的紫外線傳感器。該傳感器是波長λ<400nm的,對紫外光敏感的二氧化鈦光電二極管。輸出電壓為0~4.3v,轉(zhuǎn)換系數(shù)。經(jīng)數(shù)模轉(zhuǎn)換,把模擬信號轉(zhuǎn)換為二進制數(shù),存儲在數(shù)據(jù)緩沖區(qū)。
電源電路:加入emi抗擾模塊,采用多路供電,分別用于單片機,a/d基準和其它芯片。鍵盤與顯示:采用矩陣或4*4鍵盤,完成指令的輸入。顯示采用led顯示專用芯片與單片。
機串行聯(lián)接,節(jié)省i/o口,節(jié)約單片機資源。
3.3 系統(tǒng)軟件設(shè)計
本系統(tǒng)的穩(wěn)定工作是基于軟件算法,采用看門狗技術(shù)監(jiān)視軟件運行狀態(tài),有效提高運行的可靠性。不同型號的磁控管,對軟件作適當修改,可適合不同的應(yīng)用場合。
其中系統(tǒng)的人機對話接口(鍵盤和顯示器),包含鍵盤掃描程序、鍵處理程序和顯示子程序;電壓控制的核心子程序,包含電壓檢測子程序,數(shù)值比較子程序,角度轉(zhuǎn)換(即定時器初值轉(zhuǎn)換)子程序,過零中斷處理子程序等;數(shù)值間轉(zhuǎn)換子程序,主要用于a/d轉(zhuǎn)換后數(shù)值處理,以便電壓調(diào)節(jié)、信息顯示正確。
程序用到的主要臨時數(shù)據(jù)儲存單元的簡單介紹,系統(tǒng)的工作流程圖如圖5所示。調(diào)壓子程序如圖6所示。
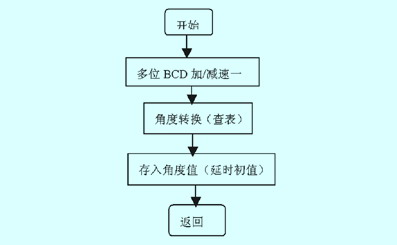
圖5 工作流程圖
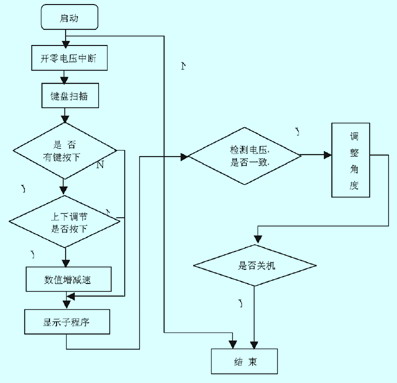
圖6 調(diào)壓子程序
4 結(jié)束語
本設(shè)計以單片機pic16f873為核心部分,以雙向可控硅為功率調(diào)節(jié)元件,充分利用軟件優(yōu)化算法,實現(xiàn)微波源的全數(shù)字調(diào)功功能。系統(tǒng)中的電壓負反饋閉環(huán)控制環(huán)節(jié),使微波源工作更穩(wěn)定,更好的實現(xiàn)功率的連續(xù)可調(diào)。此外光電隔離及變壓器隔離措施,很好地抑制了電磁干擾,保證微波源有更長的使用壽命。