
全世界人口老齡化進程正在加快,今后50年內,60歲以上的人口比例預計將會翻一番,由于各種災難和疾病造成的殘障人士也逐年增加,他們存在不同程度的能力喪失。如行走、視力、動手及語言等。為了給老年人和殘障人士提供性能優(yōu)越的代步工具,幫助他們提高行動自由度及重新融人社會,將智能機器人技術應用于電動輪椅的智能輪椅被提了出來。智能輪椅又稱輪椅式移動機器人。可以靈活避障是輪椅智能化的一個重要體現。
避障就是指機器人根據獲得的障礙物信息,做出相應的避障決策。本課題采用超聲波傳感器獲取機器人外部障礙物信息,再把障礙物信息傳給上位機,由上位機根據得到的障礙物信息做出相應的避障決策。
1 智能輪椅自主避障硬件設計
智能輪椅自主避障系統(tǒng)的硬件結構主要包括多路超聲波測距模塊、微處理器模塊、D/A驅動模塊、電源模塊,如圖1所示。

1.1 多路超聲波測距模塊
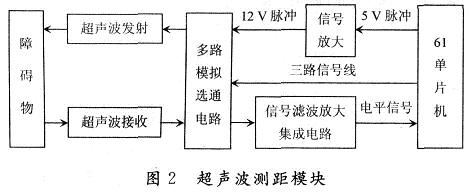
本智能輪椅自主避障系統(tǒng)采用超聲波傳感器測量障礙物的距離,工作時,由61單片機通過三路信號線選通多路模擬開關,由多路模擬開關負責每一路超聲波傳感器的通斷。每一路超聲波傳感器工作時,都由61單片機的IOB9口發(fā)射出頻率為40 kHz,幅值為5 V的矩形脈沖信號,經過信號放大電路,變成穩(wěn)定的12 V矩形脈沖信號,由超聲波發(fā)射換能器發(fā)射出超聲波。超聲波遇到障礙物返回,由超聲波接收換能器接收,經過信號濾波放大集成電路,觸發(fā)61單片機中斷。由61單片機計算渡越時間,從而計算出障礙物的距離,總體結構框圖如圖2所示。
1.2 微處理器模塊
選用臺灣凌陽16位單片機SPCE061A作為系統(tǒng)的核心,SPCE061A主要包括通用I/O端口、定時器/計數器、A/D轉換器、D/A轉換器、串行設備輸入輸出、通用異步串行接口、低電壓監(jiān)測和低電壓復位等部分,并且內置了在線仿真電路ICE接口,SPCE061A具有體積小、集成度高、可靠性好且易于擴展,較強的中斷處理能力,高性能價格比,功能強、效率高的指令系統(tǒng),低功耗、低電壓等特點。采用SPCE061A作為機器人系統(tǒng)的核心部件,由61單片機處理障礙物數據信息,并根據數據信息做出相應的避障決策。使智能輪椅靈活避障。
1.3 D/A驅動模塊
系統(tǒng)采用直流永磁電動機DG一168A左右配對分別來驅動輪椅左右輪,左、右配對使用DG一168系列具有機械性能好、過載能力大、平衡性好、調速性寬闊平滑、噪音低之優(yōu)點。DG一168A電機功率為168W,使用電壓為24 V。買回來的電動輪椅本身自帶手柄控制,經研究發(fā)現,手柄部分共六條線,紅、黑、黃、褐、蘭、白,輸出四路信號。黃、褐兩路控制輪椅前進后退;蘭、白兩路控制輪椅左轉右轉(如表1所示)。每兩路的電壓加起來要等于5V,當黃線電冶高于褐線電壓時,輪椅前進;反之輪椅后退,同理,蘭線電壓高于白線電壓時右轉;反之左轉。
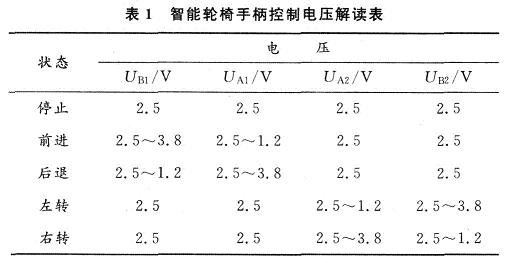
本課題的D/A模擬電路的B1,A1,A2,B2的電壓輸出分別代替了黃、褐、蘭、白四條線的電壓輸出。所以通過兩個D/A轉換器TLV5618的輸出,代替了手柄控制,具體轉換電路如圖3所示。

TLV5618與凌陽61單片機的3個I/0口相連,分別是數據串口DIN、時鐘信號SCLK、片選信號CS。MC1403只有3只腳有效,VDD,VSS及供給DA 2.5 V的參考電壓。
1.4 電源模塊
電路驅動模塊中用到了24 V,12 V,5 V三種電源,選用24 V,24 Ah的高能充電蓄電池作為動力能源,它為電機直接提供24 V工作電壓,12 V,5 V分別通過7812,7805芯片由24 V轉換得到。
2 智能輪椅自主避障軟件設計
系統(tǒng)軟件是在61單片機集成開發(fā)環(huán)境IDE2.O.O上開發(fā)的,該集成開發(fā)環(huán)境集程序的編輯、編譯、鏈接、調試以及仿真等功能為一體,具有友好的交互界面,使用戶的編程、調試工作更加方便且高效。
主程序設計如下:
主程序主要是通過掃描鍵盤,等候用戶指令,不在避障狀態(tài)下掃描等候,而進入避障狀態(tài)后會根據探測到的環(huán)境選擇相應的避障策略。在避障過程中若用戶按下停止鍵則退出避障循環(huán),主程序采用鍵盤掃描,節(jié)約了61單片機的中斷資源,同時也減小了對測距的干擾,增加了智能輪椅實時避障的靈敏度。主程序流程圖如圖4所示。

3 實驗結果分析
選用實驗室外空曠環(huán)境作為輪椅運動的測試環(huán)境,對輪椅的運動進行反復測試可知,輪椅的運動最低平均速度為16 cm/s,最高平均速度為41 cm/s;轉彎半徑為50 cm左右,根據使用者對速度的要求,可以通過改變系統(tǒng)的特定參數來設置速度的范圍。
利用介紹的方法對智能輪椅做自主避障實驗,智能輪椅自主避障良好。
4 結 語
智能輪椅自主避障具有很重要的實用價值,本文設計的基于SPCE061A的自主避障系統(tǒng)結構簡單,性價比高,易于功能擴展和移植。系統(tǒng)測試結果表明該系統(tǒng)基本達到實用化要求。