
摘 要: 考慮到多種微型盤(pán)" title="微型盤(pán)">微型盤(pán)在惡劣沖擊振動(dòng)環(huán)境中的使用要求,在采用外加固主動(dòng)控制方案的基礎(chǔ)上完成了模擬主動(dòng)控制系統(tǒng)" title="控制系統(tǒng)">控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn),詳細(xì)分析了各部分的實(shí)現(xiàn)原理和方法。對(duì)實(shí)驗(yàn)樣機(jī)的數(shù)值仿真和實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)可兼顧沖擊與振動(dòng)控制,控制效果明顯優(yōu)于被動(dòng)隔振。
關(guān)鍵詞: 微型盤(pán) 主動(dòng)控制 沖擊振動(dòng)
微型硬盤(pán)是一種應(yīng)用廣泛的關(guān)鍵信息存儲(chǔ)器件,研究它的抗振動(dòng)、沖擊控制技術(shù)" title="控制技術(shù)">控制技術(shù)對(duì)于工作在惡劣環(huán)境下的硬盤(pán)和便攜式計(jì)算機(jī)具有重要意義。對(duì)數(shù)據(jù)存儲(chǔ)業(yè)來(lái)說(shuō),磁盤(pán)驅(qū)動(dòng)器生產(chǎn)商通過(guò)增加磁道密度和磁盤(pán)轉(zhuǎn)速來(lái)擴(kuò)大計(jì)算機(jī)硬盤(pán)驅(qū)動(dòng)器的容量并改善其性能。但隨著磁密度的增加、兩相鄰磁道間距離的變小,允許讀/寫(xiě)頭和磁道的偏離誤差也相應(yīng)降低,很容易使硬盤(pán)受到傷害。本文采用外加固主動(dòng)控制方案,將電磁主動(dòng)控制技術(shù)用于磁存儲(chǔ)設(shè)備的振動(dòng)沖擊外加固中,實(shí)現(xiàn)了模擬主動(dòng)控制系統(tǒng)并得到實(shí)驗(yàn)驗(yàn)證。
1 主動(dòng)沖擊振動(dòng)控制技術(shù)
提高微型硬盤(pán)的抗沖擊與抗振動(dòng)性能始終是國(guó)內(nèi)外十分重視的研究課題。20世紀(jì)80年代初至90年代中期,多采用被動(dòng)控制技術(shù),如鋼絲繩減振器、油膜減振器、復(fù)剛度雙橡膠減振器等。隨后,主動(dòng)控制技術(shù)逐步實(shí)施于磁盤(pán)驅(qū)動(dòng)器的振動(dòng)與沖擊加固中,它可對(duì)低頻振動(dòng)和高g值沖擊有效兼容,克服了被動(dòng)控制方式難以同時(shí)滿足這兩項(xiàng)指標(biāo)的缺點(diǎn)。計(jì)算機(jī)加固主動(dòng)控制技術(shù)從物理實(shí)現(xiàn)形式來(lái)說(shuō)分為內(nèi)加固和外加固兩種。內(nèi)加固是在硬盤(pán)內(nèi)部進(jìn)行取數(shù)臂的主動(dòng)控制加固,我國(guó)從20世紀(jì)90年代中期開(kāi)始對(duì)被動(dòng)外加固技術(shù)進(jìn)行深入研究,已獲得一些可實(shí)施的較好成果[1],如無(wú)諧振峰隔振緩沖器等。隨著對(duì)強(qiáng)沖擊、較低頻振動(dòng)抗振要求的提高,研究主動(dòng)控制理論及裝置將成為提高抗振技術(shù)水平的必經(jīng)之路。
實(shí)際應(yīng)用中,控制系統(tǒng)要承受來(lái)自各個(gè)方向的振動(dòng)和沖擊,對(duì)于頭盤(pán)系統(tǒng)而言,主要是承受來(lái)自垂直于盤(pán)面方向的沖擊,故將系統(tǒng)考慮為單自由度系統(tǒng),如圖1所示。其中,傳感器、控制器、功率放大器是系統(tǒng)的電路部分,而執(zhí)行裝置、彈簧、阻尼和質(zhì)量塊則是系統(tǒng)的機(jī)械部分。
本系統(tǒng)的受控對(duì)象是微型硬盤(pán);加速度傳感器" title="加速度傳感器">加速度傳感器、前置放大器等構(gòu)成系統(tǒng)的測(cè)量模塊;控制器按基礎(chǔ)傳感信號(hào)和控制策略發(fā)出控制信號(hào);電磁執(zhí)行裝置為作動(dòng)器;功率放大器將控制信號(hào)放大并提供控制能源,驅(qū)動(dòng)作動(dòng)器產(chǎn)生執(zhí)行動(dòng)作。控制系統(tǒng)工作原理是通過(guò)基礎(chǔ)加速度傳感器拾取基礎(chǔ)振動(dòng)沖擊加速度信號(hào),經(jīng)前置放大器放大后送入控制器,在控制器中完成對(duì)信號(hào)的一次積分(轉(zhuǎn)換為速度信號(hào))和二次積分(轉(zhuǎn)換為位移信號(hào))運(yùn)算,將兩次積分結(jié)果作求和運(yùn)算,之后輸入功率放大器,最后將功率放大器輸出信號(hào)以控制電壓的形式加在執(zhí)行機(jī)構(gòu)上,執(zhí)行機(jī)構(gòu)便會(huì)產(chǎn)生相應(yīng)的作動(dòng)力抵消來(lái)自基礎(chǔ)的振動(dòng)和沖擊。
2 模擬主動(dòng)控制系統(tǒng)電路設(shè)計(jì)
2.1傳感器選擇
壓電式傳感器是一種將機(jī)械量(作用于傳感器上的加速度或壓力)轉(zhuǎn)換成電荷量的換能器,可等效為電荷源或電壓源。由于壓電傳感器的泄漏電阻通常較大,所以能較長(zhǎng)時(shí)間地保存電荷,但若負(fù)載電阻很小,傳感器受力后產(chǎn)生的電荷就會(huì)以時(shí)間常數(shù)τ按指數(shù)規(guī)律很快放電。因此,要求壓電傳感器負(fù)載電阻足夠大,以減小測(cè)量誤差。按照主動(dòng)控制方案討論的結(jié)果,采用壓電式加速度傳感器,從成本的角度考慮,本文選用不帶放大器的YD-1型加速度傳感器,其輸出信號(hào)精度為0.01mv/g,并在加速度傳感器后端設(shè)計(jì)了電荷放大電路。
2.2 電荷放大器" title="電荷放大器">電荷放大器設(shè)計(jì)
電荷放大器是輸出電壓正比于輸入電荷的一種放大器,通常用來(lái)放大壓電傳感器產(chǎn)生的電荷量。電荷放大器與壓電傳感器的連接電路如圖2所示。
圖中,Cf為反饋電容,Rf為反饋電阻。并聯(lián)反饋電阻的目的是避免電容上不斷累積直流電荷而造成運(yùn)放輸出飽和。在理想運(yùn)放條件下,輸入電流I等于反饋電流。經(jīng)分析可得,電荷放大器輸出電壓僅取決于輸入電荷Q及反饋電路參數(shù)Cf,即:
這里,反饋電容必須采用高質(zhì)量電容,否則會(huì)由于電容漏電引起誤差。
由以上討論可知,作為核心器件的運(yùn)算放大器,其輸入阻抗應(yīng)高于1012Ω,并應(yīng)具有高開(kāi)環(huán)增益、低漂移的特性。本文選用成本較低的超低漂移高精度運(yùn)算放大器AD707。為保證足夠高的靈敏度又不影響電荷放大器的低頻特性,實(shí)際電路中取Cf=2000pF,Rf=10MΩ。另外,為避免后級(jí)影響同時(shí)便于調(diào)節(jié),在電荷放大器后端增加了一級(jí)輸入阻抗較高、增益可調(diào)的反相放大器,如圖3所示。
?
2.3 積分電路設(shè)計(jì)
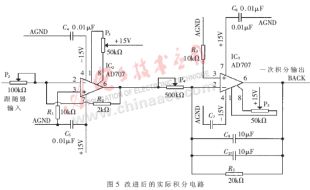
本系統(tǒng)中采用放大器實(shí)現(xiàn)有源模擬積分器。理想模擬積分器如圖4所示。這只是一種理想化的電路[2~3],而實(shí)際應(yīng)用中積分電路前后級(jí)都有運(yùn)放器件,電路每次上電后電容兩端積累的電荷不能迅速放掉,一旦上電,沖擊電壓幅值較大,電容兩端的電壓即會(huì)維持在較高幅度,對(duì)積分器的初始狀態(tài)影響較大。且其響應(yīng)帶寬很窄,在低頻段的漂移現(xiàn)象也比較顯著。因此,在電容兩端并聯(lián)阻值較大的反饋電阻,以提高積分器放電速度,擴(kuò)展電路動(dòng)態(tài)范圍。在積分運(yùn)算之前設(shè)置反相放大器,校正輸入信號(hào)極性并調(diào)節(jié)積分輸出的信號(hào)幅度。一次積分實(shí)際電路如圖5所示,二次積分與一次積分具有相似的電路結(jié)構(gòu)。
2.4功率放大器設(shè)計(jì)
根據(jù)系統(tǒng)仿真計(jì)算結(jié)果,要求控制系統(tǒng)對(duì)作動(dòng)器的輸出能力為:最大電壓Umax=13.5V,最大電流Imax=2.0A。因此,要求功放的輸出峰值功率為40W。本文選用OPA541作為功率放大器的主要器件,該芯片可以連續(xù)輸出5A的電流,常用作電動(dòng)機(jī)、音頻放大器的功率輸出級(jí)。功放部分的電路如圖6所示。
實(shí)際使用時(shí),由于OPA541芯片的工作溫度不能超過(guò)150℃,且該器件本身的散熱部分和芯片的負(fù)電源相連,因此應(yīng)格外注意外加散熱器和芯片負(fù)電源之間的絕緣措施,以免引起不良后果。另外,為避免加電時(shí)功放輸出沖擊電壓引起執(zhí)行裝置跳動(dòng)產(chǎn)生的不利影響,功放輸出經(jīng)10~15秒延時(shí)后接通為宜。
3 實(shí)驗(yàn)測(cè)試結(jié)果
3.1振動(dòng)實(shí)驗(yàn)
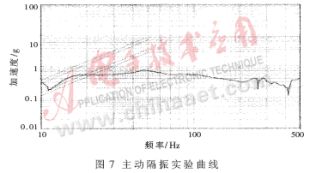
振動(dòng)實(shí)驗(yàn)采用正弦掃頻實(shí)驗(yàn),在基礎(chǔ)振動(dòng)頻率為50Hz以上、加速度恒為5g的條件下,正弦掃頻實(shí)驗(yàn)結(jié)果如圖7所示。圖中折線部分為基礎(chǔ)激勵(lì)加速度,曲線值為控制后的加速度。實(shí)驗(yàn)過(guò)程中,硬盤(pán)工作正常。

?
3.2 沖擊實(shí)驗(yàn)
在最大沖擊加速度為30g條件下的沖擊實(shí)驗(yàn)曲線如圖8所示,實(shí)驗(yàn)采用持續(xù)時(shí)間為9ms的半正弦波。其中,實(shí)驗(yàn)圖的上半部分為沖擊信號(hào)圖線,下半部分為沖擊信號(hào)與控制后檢測(cè)到的加速度圖線的合成圖。
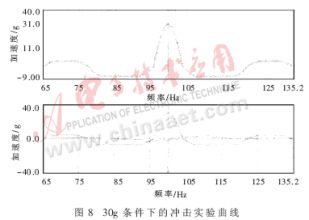
可以看出,圖形上端的基礎(chǔ)沖擊加速度最大值為31g,而下端經(jīng)過(guò)控制之后的最大加速度為-3.83g,控制效果比較理想,隔沖率達(dá)到12.7%。實(shí)驗(yàn)后硬盤(pán)可正常讀/寫(xiě),未受到損壞。
將模擬主動(dòng)控制技術(shù)用于微型盤(pán)的沖擊振動(dòng)外加固,原理簡(jiǎn)單、方法可行。實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)可兼顧沖擊與振動(dòng)控制,具有較大的位移響應(yīng)范圍和較寬的頻率響應(yīng)范圍,控制效果明顯優(yōu)于被動(dòng)隔振。由于實(shí)驗(yàn)效果與仿真結(jié)果尚有一定偏差,在今后的實(shí)驗(yàn)中應(yīng)該注意提高微型盤(pán)與上頂板之間的連接剛度。實(shí)驗(yàn)證實(shí),通過(guò)設(shè)置粘彈性阻尼墊的方法確實(shí)可以改善控制效果。
參考文獻(xiàn)
1 陳光達(dá),趙 驥,徐光弘. 溫盤(pán)驅(qū)動(dòng)器抗沖擊主動(dòng)控制技術(shù).西安電子科技大學(xué)學(xué)報(bào), 1996.6
2 童詩(shī)白. 模擬電子技術(shù)基礎(chǔ)(第二版). 北京:高等教育出版社,1988
3 周亦武. 運(yùn)算放大器電路實(shí)踐.福州:福建科學(xué)技術(shù)出版社,1998