
一、 Linux系統(tǒng)中的USB攝像頭驅(qū)動(dòng)程序
USB攝像頭以其良好的性能和低廉的價(jià)格得到廣泛應(yīng)用。同時(shí)因其靈活、方便的特性,易于集成到嵌入式系統(tǒng)中。但是如果使用現(xiàn)有的符合Video for Linux標(biāo)準(zhǔn)的驅(qū)動(dòng)程序配合通用應(yīng)用程序,難以充分利用USB帶寬,幀速不高,不易滿足實(shí)時(shí)監(jiān)控等要求。本文首先介紹在Linux系統(tǒng)下USB攝像頭驅(qū)動(dòng)編制的一般方法,然后說明在此基礎(chǔ)上如何提高幀速。
USB設(shè)備驅(qū)動(dòng)程序完全符合通用設(shè)備驅(qū)動(dòng)的準(zhǔn)則,不同的是內(nèi)核提供了一些特別的API函數(shù),方便驅(qū)動(dòng)注冊(cè)、銷毀自己,例如usb_reSister()和usb_dereSister();2.4版的內(nèi)核還提供了對(duì)于hotplug的支持。
1.1 USB攝像頭驅(qū)動(dòng)的一般編寫方法
攝像頭屬于視頻類設(shè)備。在目前的Linux核心中,視頻部分的標(biāo)準(zhǔn)是Video for Linux(簡(jiǎn)稱V4L)。這個(gè)標(biāo)準(zhǔn)其實(shí)定義了一套接口,內(nèi)核、驅(qū)動(dòng)、應(yīng)用程序以這個(gè)接口為標(biāo)準(zhǔn)進(jìn)行交流。目前的V4L涵蓋了視、音頻流捕捉及處理等內(nèi)容,USB攝像頭也屬于它支持的范疇。
因此,USB攝像頭的驅(qū)動(dòng)應(yīng)當(dāng)與內(nèi)核提供的視頻驅(qū)動(dòng)掛鉤。即首先在驅(qū)動(dòng)中聲明一個(gè)video_device結(jié)構(gòu),并為其指定文件操作函數(shù)指針數(shù)組.fops,向系統(tǒng)注冊(cè)。在應(yīng)用程序發(fā)出文件操作的相關(guān)命令時(shí),核心根據(jù)這些指針調(diào)用相應(yīng)函數(shù),并將該結(jié)構(gòu)作為參數(shù)傳遞給它們。這樣,就完成了驅(qū)動(dòng)和核心之間的通信。例如:
|
static struct video_device vdev_template={……}; //聲明video_device,指出掛接驅(qū)動(dòng) static struct file_operations ov511_fops={……}; //聲明本驅(qū)動(dòng)的文件操作函數(shù)指針 struct video_device*vdev=video_devdata(file); //從文件指針中提取出video_device結(jié)構(gòu) |
在video_device結(jié)構(gòu)中,有一個(gè)私有指針priv,可以將它指向一塊保留內(nèi)存。在這塊內(nèi)存中,保存著本驅(qū)動(dòng)、本設(shè)備的相關(guān)初始化信息。這塊內(nèi)存的申請(qǐng)、初始化、指針指向等工作都是在USB驅(qū)動(dòng)的枚舉函數(shù).probe中完成。這樣,在枚舉函數(shù)將控制權(quán)返還給系統(tǒng)后,因?yàn)閮?nèi)核不銷毀保留內(nèi)存,所以驅(qū)動(dòng)仍然保留著自己的信息。這點(diǎn)與Windows系統(tǒng)中WDM驅(qū)動(dòng)有異曲同工之處。當(dāng)然,在驅(qū)動(dòng)卸載函數(shù)中,應(yīng)當(dāng)將申請(qǐng)的各塊內(nèi)存全部釋放。
1.2 使用雙URB輪流通信
眾所周知,USBl.1總線標(biāo)準(zhǔn)定義了控制、中斷、批量、等時(shí)等四種管道。對(duì)于時(shí)間性極強(qiáng)但是準(zhǔn)確度要求不高的視頻捕捉應(yīng)用來說,攝像頭應(yīng)當(dāng)使用等時(shí)傳輸方式。為了盡可能快地得到圖像數(shù)據(jù),應(yīng)當(dāng)在URB中指定USB_ISO_ASAP標(biāo)志。
urb->transfer_flags=USB_ISO_ASAP;//盡可能快地發(fā)出本URB
Linux系統(tǒng)中任何USB傳輸都通過URB實(shí)現(xiàn)。為提高速度,可以考慮擴(kuò)大URB的緩沖,這樣可以降低每個(gè)USB事務(wù)中握手信息所占比例,提高有效數(shù)據(jù)的傳輸速度。但是受限于總線帶寬和具體的USB設(shè)備芯片,單純擴(kuò)大URB的緩沖不能無限制地解決問題。具體分析一下USB傳輸在操作系統(tǒng)中的實(shí)現(xiàn):每次傳輸都要包括URB的建立、發(fā)出、回收、數(shù)據(jù)整理等階段,這些時(shí)間不產(chǎn)生有效數(shù)據(jù)。因此可以建立兩個(gè)URB,在等待一個(gè)URB被回收時(shí),也就是圖像正在被傳感器采集時(shí),處理、初始化另一個(gè)URB,并在回收后立刻將其發(fā)出。兩個(gè)URB交替使用,大大減少了額外時(shí)間。工作流程如圖1所示。
|
|
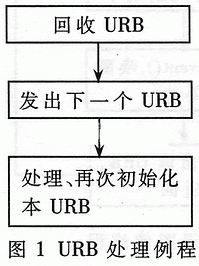
這個(gè)過程是在URB的完成例程中實(shí)現(xiàn)的,有兩點(diǎn)需要注意:首先處理再次初始化的代碼時(shí)間不能長(zhǎng),否則會(huì)造成完成例程的重人,如果確實(shí)來不及,可以在完成例程中設(shè)定標(biāo)志,例如“數(shù)據(jù)采集好”旗語,由應(yīng)用程序使用阻塞ioctl()來查詢?cè)撈煺Z并做處理;其次由于CPU可能會(huì)在完成例程中停留較長(zhǎng)時(shí)間,系統(tǒng)負(fù)擔(dān)較大,可以在.open函數(shù)中初始化兩個(gè)URB并將其發(fā)出,有限度地減輕系統(tǒng)負(fù)擔(dān)。
1.3 使用雙幀緩沖提高效率
Linux系統(tǒng)中,文件操作通常是由read、write等系統(tǒng)調(diào)用來完成。這些系統(tǒng)調(diào)用在驅(qū)動(dòng)中的解決方法就是用copy_to_user()、copy_from_user()等函數(shù)在核態(tài)、戶態(tài)內(nèi)存空間中互相拷貝。但是對(duì)于大批量的圖像數(shù)據(jù),采用拷貝的方法顯然會(huì)增加時(shí)間開銷,因此用內(nèi)存映射的方法解決。首先使用vmalloc()申請(qǐng)足夠大的核態(tài)內(nèi)存,將其作為圖像數(shù)據(jù)緩沖空間,兩個(gè)URB帶回的圖像數(shù)據(jù)在這里暫存;然后使用remap_page_range()函數(shù)將其逐頁映射到用戶空間中。戶態(tài)的圖像處理程序使用mmap()函數(shù),直接讀寫核態(tài)圖像緩沖內(nèi)存,大大減少額外開銷。
圖像數(shù)據(jù)的處理可能要花費(fèi)比較長(zhǎng)的時(shí)間,不同的算法對(duì)于數(shù)據(jù)保留時(shí)間的要求也不一樣。因此可以申請(qǐng)兩幀圖像緩沖,在處理一幀圖像的同時(shí),將兩個(gè)URB帶回的數(shù)據(jù)全部填充到另一幀緩沖中,這樣可以免去時(shí)間沖突上的麻煩。
值得注意的是:這種方法要求時(shí)刻持有當(dāng)前幀的序號(hào)、每一幀的起始地址等信息,不能將兩幀圖像混淆。這些信息可以保存在保留內(nèi)存中,當(dāng)前幀的數(shù)據(jù)整理、序號(hào)改變?cè)赨RB完成例程中實(shí)現(xiàn)。
二、 V4L標(biāo)準(zhǔn)的改進(jìn)
V4L標(biāo)準(zhǔn)目前已經(jīng)發(fā)展到第二版V4L2,其基本思路與V4L相同。
2.1 標(biāo)準(zhǔn)分析
根據(jù)V4L標(biāo)準(zhǔn),戶態(tài)程序在需要一幀圖像時(shí),CPU的走向如圖2。CPU按照123456的順序完成一個(gè)循環(huán)。在這里,有一個(gè)細(xì)節(jié)被忽略:在完成例程中,也就是圖2中步驟6,該URB被立刻發(fā)出,但是由于這時(shí)用戶程序正在阻塞等待,沒辦法再次提出獲得圖像的申請(qǐng),因此在判斷有無新請(qǐng)求時(shí),判斷的結(jié)果必然是當(dāng)前無請(qǐng)求,導(dǎo)致下一個(gè)URB帶回的數(shù)據(jù)被驅(qū)動(dòng)丟棄;由于核態(tài)、戶態(tài)的切換需要一定的時(shí)間,加上戶態(tài)多進(jìn)程同步等開銷,等到應(yīng)用程序能夠再次發(fā)出獲得一副圖像的申請(qǐng)時(shí),已經(jīng)有不止一個(gè)URB帶回的數(shù)據(jù)被丟棄掉,這些URB包含的數(shù)據(jù)正好是新一幀圖像的開始部分。因此驅(qū)動(dòng)必須等到再下一幀圖像才能保存數(shù)據(jù)、緩沖。這樣憑白損失了一幀圖像,幀速最少下降一半。
2.2 改進(jìn)思路:不間斷采集
為了解決這個(gè)問題,可以改進(jìn)V4L標(biāo)準(zhǔn)作,使其增加新的功能:通過新的參數(shù),讓ioetl()函數(shù)通知驅(qū)動(dòng)不間斷采集、緩沖圖像數(shù)據(jù),輪流保存在兩幀緩沖區(qū)中,并在一幀圖像采集好后,設(shè)定“圖像采集好”旗語。戶態(tài)程序只需要發(fā)出一次“獲得圖像”請(qǐng)求,就可以通過阻塞等待該旗語,不斷獲得圖像。在采集結(jié)束后,再次通過新的參數(shù),讓驅(qū)動(dòng)停止緩沖即可。CPU工作流程圖如圖3。
注意到圖2、圖3,兩種“判斷有無新請(qǐng)求”的不同,即可發(fā)現(xiàn)新方法假定一直有請(qǐng)求,因此不丟棄每個(gè)URB帶回的數(shù)據(jù),輪流保存在兩個(gè)幀緩沖內(nèi)。
V4L已經(jīng)作為約定俗成的標(biāo)準(zhǔn)被內(nèi)核支持,因此如果使用全新的參數(shù),工作量將相當(dāng)巨大,并且不能和現(xiàn)有的應(yīng)用程序兼容。考慮到現(xiàn)有的圖像采集應(yīng)用程序使用VIDIOCMCAPTURE作為參數(shù),并提供幀序號(hào),要求驅(qū)動(dòng)將圖像保存到指定序號(hào)的幀緩沖內(nèi)。由于驅(qū)動(dòng)通常僅僅提供幾幀緩沖,因此該序號(hào)不會(huì)大于某個(gè)數(shù)字,如10。因此可以繼續(xù)使用VIDIOCMCAPTURE參數(shù),搭配較大的序號(hào)來表示新增的功能,例如用10000和10001來分別表示開始和停止緩沖圖像數(shù)據(jù)的要求。驅(qū)動(dòng)在收到VIDIOCMCAPTURE要求后,檢查這個(gè)序號(hào)。如果小于10000,則按照正常的方法處理,否則按照改進(jìn)方法。這種思路可以有效解決兼容性問題。
2.3 實(shí)驗(yàn)結(jié)果
在賽揚(yáng)366、USBl.1接口的計(jì)算機(jī)平臺(tái)上,采用上述不間斷采集改進(jìn)V4L標(biāo)準(zhǔn),配合雙URB、雙幀緩沖等方法后,幀速提高兩倍有余,有效數(shù)據(jù)傳輸速度達(dá)960KB/s,接近等時(shí)傳輸方式下USB總線的帶寬極限。 推薦閱讀:《rh9實(shí)現(xiàn)視頻的捕獲》,該文檔中有詳細(xì)的代碼