
0 引 言
眾所周知,,直流電動機調速性能好,,但存在機械換向裝置易造成換向火花、電磁干擾及需要定期維護等不足,;同步電動機效率高,,功率因數(shù)可調,但存在啟動困難,,重載時易振蕩失步等問題,。
隨著電力電子技術、計算機技術和新型永磁材料的不斷發(fā)展,,為提出一種利用電子換向原理實現(xiàn)永磁無刷電動機控制創(chuàng)造了條件,。特別是近幾年推出的數(shù)字信號處理器(DSP)芯片,解決了原來微處理器結構復雜,,單片微處理速度達不到實時系統(tǒng)控制的要求,,為無刷電動機的復雜算法提供了軟硬件基礎。
1 系統(tǒng)結構和工作原理
無刷電動機屬于一種自控同步電動機,,它主要由DSP電機專用高速處理器芯片,、轉子位置傳感器、邏輯驅動電路,、功率電子開關,、電流和電壓檢測等裝置組成。DSP控制的無刷電動機系統(tǒng)結構如圖1所示,。其中,,無刷電動機定子繞組為星形接法;DSP控制芯片ADMCF328驅動專用集成芯片IR2130,;逆變橋采用三相橋式電路,;轉子位置檢測器利用霍爾元件檢測,并利用位置信號估算轉子的轉速,,以實現(xiàn)轉速閉環(huán)控制,。
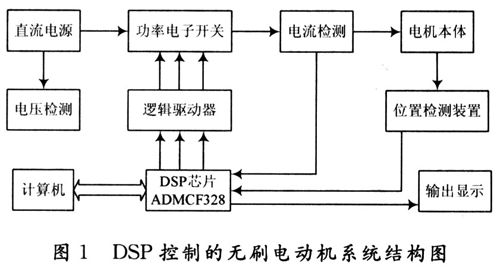 |
無刷電動機的轉子采用永磁體,產生直軸位置的勵磁磁場,,定子為電樞繞組,,通過功率控制器控制各相繞組的通斷狀態(tài)而產生旋轉磁場。設計無刷電動機控制系統(tǒng)設計的關鍵是如果選擇轉子位置檢測器,當電動機定子電樞系統(tǒng)直接由轉子轉速控制,。當電動機速度降低時,,位置檢測器的輸出信號頻率也降低,電樞電流頻率及其旋轉磁場的速度也隨之降低,,但若使電樞磁場與勵磁磁場的相對位置仍保持不變,,則電動機就不會失步。同時,,由無刷電動機調速特性可知,,調節(jié)直流電壓Ud的大小,可以改變電動機的轉速性能,,這與有刷直流電動機有相似的機械特性,。
2 控制系統(tǒng)硬件設計
2.1 控制系統(tǒng)設計
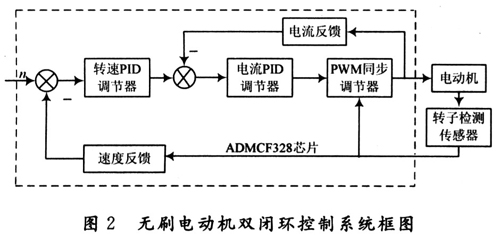
電動機控制系統(tǒng)采用速度外環(huán)和電流內環(huán)的雙閉環(huán)控制,兩個反饋環(huán)節(jié)的調節(jié)器都采用PID數(shù)字調節(jié)器,,如圖2所示,。計算電動機轉子轉速的目的是為了實現(xiàn)轉速調節(jié)和計算出電樞電流的指令值。在直流母線上采集電流調節(jié)器的采樣信號,,采樣信號與前端值比較計算后輸出給PWM同步調節(jié)器,。電流調節(jié)器、速度調節(jié)器的計算除了調節(jié)器設定的PID參數(shù)KP,,kI和kD外,,還要設定PWM周期參數(shù)等。
 |
2.2 DSP控制板
DSP控制板由ADI公司生產的專用DSP芯片ADMCF328,、硬件控制與恢復電路等組成,。ADM-CF、328芯片具有強大,、快速的處理能力,,主要完成控制算法的處理、PWM輸出,、模/數(shù)轉換,、與上位機通信和輸出顯示等功能。
該芯片只有28個外部引腳,,縮小了控制板尺寸,,提高了系統(tǒng)的可靠性,而且具有價格低等優(yōu)點,。芯片的內部集成了一個具有反向功能的5倍放大器,,用于精確的電流采樣,實現(xiàn)電流的閉環(huán)控制,。芯片與IR2130驅動電路、轉子位置檢測器、鍵盤和計算機等外設備連接,,可實現(xiàn)無刷電動機的實時控制和運行監(jiān)視,。
2.3 轉子位置檢測器
轉子位置檢測器是無刷電動機的重要組成部分,常用的轉子位置檢測器有電磁感應式,、光電式,、霍爾開關式和接近開關式。高性能的無刷電機位置檢測器,、磁電碼盤和旋轉變壓器式,,可根據(jù)實際控制系統(tǒng)的要求予以選擇。
該系統(tǒng)選用霍爾開關式轉子位置檢測器,,具有性價比高的特點,。它的工作原理是:在霍爾元件的輸入端通入控制電流,當霍爾元件受到外磁場作用時,,輸出端便有了信號輸出,,根據(jù)霍爾元件的控制信號便可判斷轉子磁極的位置。同時利用定時器確定相鄰兩次霍爾位置狀態(tài)變化所需的時間,,就可以估算出轉子的實際轉數(shù)和轉向,。
3 控制系統(tǒng)軟件設計
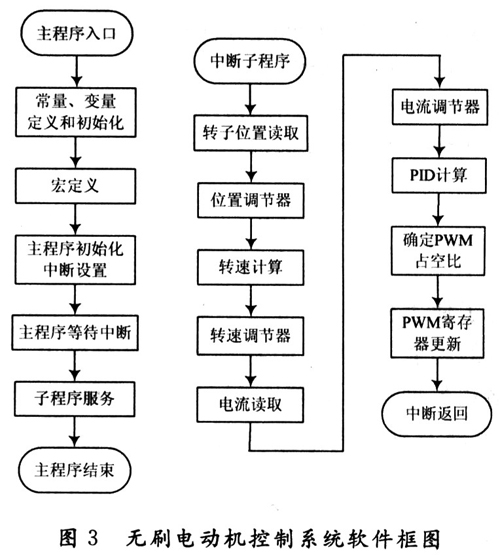
控制系統(tǒng)軟件設計與上述硬件電路密切相關。軟件程序設計主要包括主程序和中斷服務子程序,。主程序主要完成ADFVCF328的初始化,、變量與常量參數(shù)的設置等。主程序實際上是進入一個查詢過程,,程序不斷查詢電壓狀態(tài),、電流狀態(tài),更新標志并調入換相服務子程序,,給電動機相應的定子繞組通電,。中斷服務子程序主要完成ADC轉換,測量電機定子電流,、直流電壓,、PID數(shù)字比較運算,確定PWM占空比,、PMW周期中斷,,計算及更新PWM寄存器的值。軟件程序設計還要考慮轉子位置傳感器,、霍爾元件信號接口的初始化及功能設計,、PID數(shù)字反饋系統(tǒng)的參數(shù)設定等。
由于ADMCF328芯片數(shù)字PIO口以串口多路復用,,因此選擇引腳時要特別注意,。圖3給出了無刷電動機控制系統(tǒng)中部分主程序和中斷服務子程序的軟件程序框圖,。
DSP芯片軟件編程一般分為兩部分:首先用匯編語言或C語言編寫DSP程序編譯、匯編并鏈接成為可執(zhí)行的DSP程序,;然后利用代碼調試工具對生成的可執(zhí)行的:DSP程序進行系統(tǒng)調試,。該控制系統(tǒng)可以根據(jù)軟件程序框圖編寫DSP程序代碼清單。
4 結 語
利用數(shù)字信號處理器(DSP)電機專用高速芯片ADMCF328,、轉子位置傳感器,、專用集成芯片IR2130、功率電子開關,、電流和電壓檢測裝置等設計的無刷電動機控制系統(tǒng),,具有效率高,功率因數(shù)可調,,啟動方便和重載時不失步等優(yōu)點,。無刷電動機選用新型永磁材料和DSP電機專用高速處理器芯片,解決了原來微處理器結構復雜,,單片微處理器速度達不到實時系統(tǒng)控制要求的不足,。用Matlab/Simulink軟件對無刷電動控制系統(tǒng)搭建了仿真模型。仿真輸出的轉矩,、轉速和電流波形及數(shù)據(jù)證明,,該控制系統(tǒng)速度調節(jié)性能好,擾動作用下運行穩(wěn)定,,系統(tǒng)的動態(tài)性能優(yōu)良,。