
針對(duì)長(zhǎng)途客車“三超”(中途超載上人,超時(shí),超速)以及在非正常停靠站私自停車上人導(dǎo)致的客車超載,同時(shí)目前市面上視頻監(jiān)控設(shè)備由于體積大、成本高等,使其難以推廣應(yīng)用在車輛中等問(wèn)題,整合USB攝像頭低成本、USB存儲(chǔ)介質(zhì)較SD(Secure Digital Memory Card)卡存儲(chǔ)速度更快、支持更大容量等優(yōu)點(diǎn),提出了基于嵌入式。Linux及S3C2440平臺(tái)的雙USB接口車載視頻存儲(chǔ)方案。本方案主要利用單片機(jī)判別模塊采集車輛行駛過(guò)程中運(yùn)動(dòng)狀態(tài)信息(是否超速,存在急剎車、中途停車超時(shí)等),并結(jié)合車門(mén)在車速為零時(shí)的開(kāi)閉對(duì)長(zhǎng)途客車在非正常停靠點(diǎn)超載上人進(jìn)行主動(dòng)視頻監(jiān)控,便于以后的責(zé)任追究和認(rèn)定,為監(jiān)控中心的管理提供輔助。
1 系統(tǒng)總體結(jié)構(gòu)設(shè)計(jì)
為方便系統(tǒng)擴(kuò)展,本文將其劃分為單片機(jī)判別模塊和視頻采集存儲(chǔ)模塊兩部分。單片機(jī)判別模塊采用C8051F040處理器,利用其充足的接口資源,對(duì)車輛是否超速、急停、超載等情況做出判斷。本模塊完成將力傳感器信號(hào)、車速脈沖信號(hào)調(diào)理后供單片機(jī)處理并與存儲(chǔ)模塊通信。采用測(cè)周法測(cè)量車輛變速箱輸出脈沖周期,進(jìn)而可以得到車速、加速度等信息,配合力傳感器測(cè)量結(jié)果為判定車輛是否超速、急停、超載等提供判斷依據(jù)。單片機(jī)對(duì)以上情況進(jìn)行編碼,通過(guò)串口將不同信息編碼發(fā)送給ARM視頻存儲(chǔ)模塊,供其作出不同存儲(chǔ)策略。系統(tǒng)總體結(jié)構(gòu)如圖1所示。
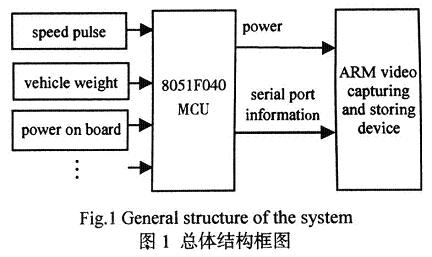
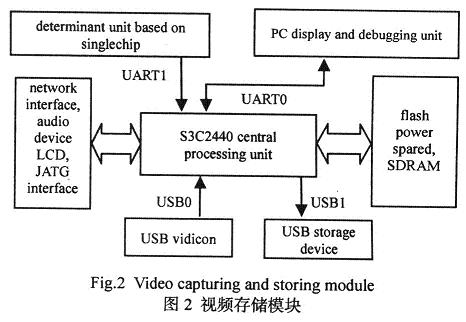
視頻存儲(chǔ)模塊根據(jù)接收到單片機(jī)發(fā)出的串口信息,對(duì)后續(xù)行為做出判斷,如是否存儲(chǔ)、存儲(chǔ)時(shí)間、存儲(chǔ)位置等。模塊硬件平臺(tái)設(shè)計(jì)如圖2所示:中央處理器選用三星公司ARM9架構(gòu)S3C2440處理器(可以穩(wěn)定工作在400 MHz,保證采集存儲(chǔ)過(guò)程流暢);選用64 MSDRAM內(nèi)存及64 MBFLASH作為系統(tǒng)程序存儲(chǔ)設(shè)備。接口資源包括:2個(gè)USB口(均配置為HOST模式)、100 M以太網(wǎng)口、2個(gè)串口、音頻口等。
2 S3C2440視頻采集存儲(chǔ)模塊
整個(gè)模塊正常情況下主要由單片機(jī)系統(tǒng)提供電源。另外,外接一獨(dú)立直流電源裝置,以免在交通事故時(shí)汽車熄火斷電,影響系統(tǒng)工作。此模塊主要完成視頻的基于事件的存儲(chǔ)功能,判斷功能由單片機(jī)模塊提供,另外依據(jù)串口實(shí)時(shí)掃描特性可提供時(shí)分復(fù)用觸發(fā)功能。模塊間獨(dú)立性高,適合移植到其他場(chǎng)合推廣使用。
2.1 USB硬件連接及Linux內(nèi)核配置修改
2.1.1 USB硬件連接
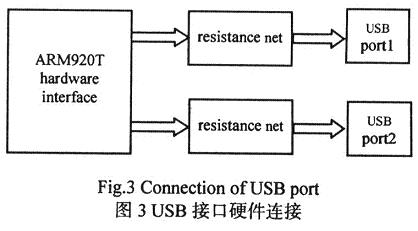
三星公司S3C2440芯片共有2路HOST USB:DP[1:0]及DN[1:0]口,一路DIVICE PDN0,PDP0 口,其中DP1,DN1分別與PDP0,PDN0接口復(fù)用,根據(jù)相關(guān)寄存器配置不同而具有不同功能。本課題中,將其配置為2路HOST使用,一路連接USB攝像頭,另一路連接USB接口的存儲(chǔ)設(shè)備(可以是優(yōu)盤(pán)或者USB移動(dòng)硬盤(pán))。本文沒(méi)有用到芯片自帶的SD卡接口進(jìn)行存儲(chǔ)主要出于以下考慮:
a)速度:普通SD卡的數(shù)據(jù)傳輸速度約2 MB/s;高速SD卡數(shù)據(jù)傳輸速度約10 MB/s;極速SD數(shù)據(jù)傳輸速度約20 MB/s。而現(xiàn)在通用的USB2.0的全速傳輸速率是480 Mbps(60 MB/s),為普通SD卡傳輸速度的30倍。再者,USB3.0標(biāo)準(zhǔn)也已推出,速度可達(dá)5 Gbps,并向下兼容。USB已經(jīng)成了高速、方便的代名詞,本文選用USB也正出于其通用性和方便升級(jí)性考慮。
b)容量瓶頸:現(xiàn)有發(fā)行的嵌入式Linux2.4.X內(nèi)核對(duì)SD卡標(biāo)準(zhǔn)模式容量的支持絕大數(shù)為2 G以下(不包含2 G),要支持到更大容量需要對(duì)SD卡驅(qū)動(dòng)程序進(jìn)行大量修改,并且協(xié)議標(biāo)準(zhǔn)推出相對(duì)較晚,較新的嵌入式Linux 2.6.24內(nèi)核通過(guò)筆者實(shí)際驗(yàn)證可以支持到2 G容量,但要對(duì)驅(qū)動(dòng)進(jìn)行多處修改,后續(xù)升級(jí)復(fù)雜,穩(wěn)定性也需要進(jìn)一步驗(yàn)證。
鑒于以上兩點(diǎn),采用USB接口進(jìn)行視頻數(shù)據(jù)的采集和存儲(chǔ),兩路USB接口部分硬件連接如圖3所示。
2.1.2 Linux內(nèi)核配置修改
在Linux下,所有外設(shè)都被看成是一種特殊的文件,稱為設(shè)備文件。設(shè)備驅(qū)動(dòng)程序?yàn)閮?nèi)核和外設(shè)之間提供接口函數(shù),完成設(shè)備的初始化與釋放、對(duì)設(shè)備文件的各種操作及中斷處理等。這些接口函數(shù)為應(yīng)用程序屏蔽了外設(shè)硬件的細(xì)節(jié),使程序可以像普通文件一樣對(duì)外設(shè)進(jìn)行操作。Linux系統(tǒng)中子模塊Video4Linux向虛擬文件系統(tǒng)注冊(cè)視頻設(shè)備文件,為視頻應(yīng)用程序提供了一套統(tǒng)一的API,視頻應(yīng)用程序通過(guò)標(biāo)準(zhǔn)的系統(tǒng)調(diào)用即可操縱各種不同的視頻捕獲設(shè)備。
考慮到更好的推廣性,采用市面上常見(jiàn)的中星微301系列zc0301pl芯片攝像頭,此攝像頭支持JPEG格式的圖像采集。模塊中分別對(duì)USB OV511 Camera support,Device Drivers等菜單選項(xiàng)進(jìn)行適當(dāng)配置。除此之外,還需對(duì)USB的配置文件進(jìn)行修改,本文選用Linux 2.6.24內(nèi)核,主要修改的文件如下:
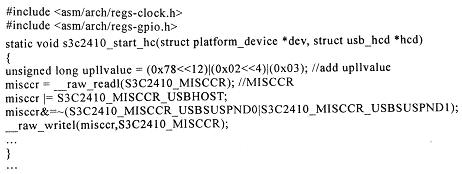
linux-2.6.24/driVers/usb/host/Kconfig,linux-2.6.24/drivers/usb/host/ohci-S3C2440.c和linux-2.6.24/drivers/usb/core/hub.c.其中主要涉及對(duì)MISCCR寄存器進(jìn)行正確設(shè)置。以修改ohci-s3c2440.c文件為例,部分需添加代碼:
2.2 視頻采集存儲(chǔ)程序設(shè)計(jì)
Vide04Linux設(shè)備驅(qū)動(dòng)程序只提供了在系統(tǒng)層面上訪問(wèn)硬件設(shè)備的一系列讀、寫(xiě)等函數(shù)的接口,要實(shí)現(xiàn)存儲(chǔ),還需再編寫(xiě)一個(gè)對(duì)視頻流采集的應(yīng)用程序,總體上創(chuàng)建兩個(gè)進(jìn)程:進(jìn)程一實(shí)時(shí)掃描串口接收到的信息,通過(guò)讀取命名管道內(nèi)容將編碼信息發(fā)送給進(jìn)程二;進(jìn)程二根據(jù)接收到的編碼做出判斷,區(qū)別各種不規(guī)范駕駛行為,設(shè)定定時(shí)器不同時(shí)長(zhǎng)以控制存儲(chǔ)時(shí)間,并將視頻分類存儲(chǔ)到不同目錄中。
Video4Linux設(shè)備驅(qū)動(dòng)程序支持兩種捕獲圖像的方式:內(nèi)存影射mmap方式和直接讀取read方式。mmap方式采用共享內(nèi)存方式,數(shù)據(jù)采集速度快,但這種采集方式需攝像頭硬件支持。結(jié)合本文中使用的攝像頭,在圖像采集過(guò)程中,采用read方式直接讀取設(shè)備文件,將獲得的一幀數(shù)據(jù)保存到緩沖區(qū)中,通過(guò)convertframe()函數(shù)將pFramebuffer中的數(shù)據(jù)轉(zhuǎn)換成完整的JPEG格式的數(shù)據(jù)存儲(chǔ)到ptframe中,然后調(diào)用fWrite()函數(shù)將緩沖區(qū)中的JPEG格式的數(shù)據(jù)寫(xiě)到指定文件中,從而得到一副JPEG格式原始數(shù)據(jù)塊。部分程序如下:
對(duì)于存儲(chǔ)的控制,本文采用“命名管道”方式,這是一種簡(jiǎn)單的進(jìn)程間通信機(jī)制,在同一計(jì)算機(jī)的不同進(jìn)程之間,支持可靠的,單向或雙向的數(shù)據(jù)通信。
命名管道由視頻存儲(chǔ)進(jìn)程利用函數(shù)int mkfifo(constchar*pathname,mode_t mode)創(chuàng)建,負(fù)責(zé)讀取由串口掃描接收進(jìn)程接收到的控制信息。部分程序如下:
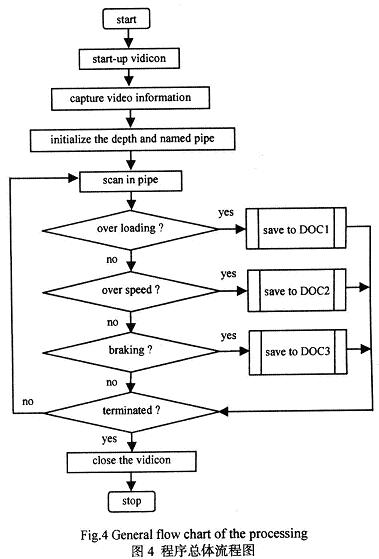
程序總體流程圖如圖4所示。
3 試驗(yàn)結(jié)果
嵌入式內(nèi)核采用較新的Linux2.6.24版本,配置成功后將編譯生成的鏡像文件下載到目標(biāo)機(jī)。應(yīng)用程序可執(zhí)行文件通過(guò)宿主機(jī)上交叉編譯器arm-linux-gcc4.4.1生成,向目標(biāo)機(jī)移植成功后便可以在目標(biāo)機(jī)上運(yùn)行。本文中攝像頭采用中星微301系列zc0301p1芯片,存貯器選用臺(tái)電存儲(chǔ)之星U盤(pán),容量為4 G。
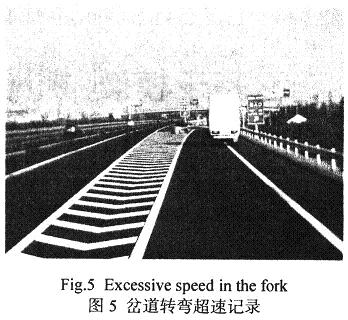
視頻采集存儲(chǔ)模塊根據(jù)接收到的不同違章信息,在執(zhí)行文件當(dāng)前所在目錄位置分別建立DOCn(n=1,2,…)文件夾,將視頻信息分類保存在相應(yīng)目錄下。圖5為駕駛員在岔道轉(zhuǎn)彎時(shí)刻因超速產(chǎn)生觸發(fā)條件,進(jìn)而觸發(fā)視頻采集存儲(chǔ)視頻中的一副圖片。另外,在系統(tǒng)運(yùn)行時(shí),還可以根據(jù)需要設(shè)置錄制時(shí)間的長(zhǎng)短,以滿足不同的需求和存貯器容量的限制。
4 結(jié)論
本系統(tǒng)中單片機(jī)模塊根據(jù)運(yùn)算結(jié)果產(chǎn)生觸發(fā)條件,通過(guò)串口發(fā)送不同編碼信息來(lái)區(qū)別超速、緊急剎車、超載等情形。實(shí)驗(yàn)結(jié)果表明整個(gè)系統(tǒng)安裝簡(jiǎn)便,成本低廉,工作穩(wěn)定可靠。另外通過(guò)修改單片機(jī)模塊觸發(fā)條件,可擴(kuò)展用于工廠、銀行及小區(qū)等場(chǎng)合下基于事件觸發(fā)的智能監(jiān)控。