
摘 要: 介紹了美軍第三代短波通信協(xié)議中同步通信管理協(xié)議的相關(guān)概念,給出了在VC6.0環(huán)境下,采用多線程技術(shù)所實(shí)現(xiàn)的協(xié)議框架、關(guān)鍵技術(shù)以及部分改進(jìn),證明其實(shí)用性。
關(guān)鍵詞: 短波通信 同步管理協(xié)議 HF-3G
1 研究背景
短波(HF)通信利用短波波段(頻率3M~30MHz)電磁波進(jìn)行無線通信,是重要的遠(yuǎn)距離無線電通信手段,廣泛應(yīng)用于氣象、商業(yè)等部門,特別是軍事通信領(lǐng)域。1988年,美軍推出了工作在異步模式的《第二代中短波系統(tǒng)互操作及性能標(biāo)準(zhǔn)》(即MIL-STD-188-141A標(biāo)準(zhǔn),簡稱HF-2G),為了能夠更好地支持大規(guī)模數(shù)據(jù)傳輸和Internet應(yīng)用,1998年《第三代中短波系統(tǒng)互操作及性能標(biāo)準(zhǔn)》(即MIL-STD-188-141B,簡稱HF-3G)[1]及2001年的修改版[2]相繼誕生。HF-3G的改進(jìn)和優(yōu)勢在于它以同步方式操作,在高網(wǎng)絡(luò)負(fù)載下有更好的性能。
HF-3G所有的鏈路" title="鏈路">鏈路建立以及同步數(shù)據(jù)傳輸都依賴于站點(diǎn)的同步時鐘" title="同步時鐘">同步時鐘。HF-3G網(wǎng)絡(luò)同步操作計(jì)劃通過外部方式(如GPS接收器)獲得時鐘,保持同步。但當(dāng)無法獲得統(tǒng)一的外部同步時鐘時,同步管理協(xié)議就顯得尤為重要。
本文主要介紹HF-3G同步管理協(xié)議在VC6.0上的軟件實(shí)現(xiàn)。HF-3G協(xié)議中并沒有對該同步管理協(xié)議進(jìn)行測試,本文的實(shí)現(xiàn)數(shù)據(jù)證明了其實(shí)用性。
2 第三代短波同步管理協(xié)議介紹
HF-3G同步管理協(xié)議主要包括:初始時間發(fā)布、同步校驗(yàn)握手、異步站點(diǎn)入網(wǎng)、同步保持四個子協(xié)議。它們共同完成以下3個任務(wù):
(1)補(bǔ)償時間基準(zhǔn)漂移的同步保持。
(2)為后來進(jìn)入網(wǎng)絡(luò)的站點(diǎn)提供時間服務(wù)。
(3)為網(wǎng)絡(luò)成員提供初始時間發(fā)布。
下面介紹該協(xié)議中駐留組和駐留時間的概念以及主要同步管理協(xié)議數(shù)據(jù)單元的定義。
2.1 駐留組與駐留時間
HF-3G網(wǎng)絡(luò)中成員被劃分成組,不同的組在每個掃描的駐留時間內(nèi)分別監(jiān)聽不同的信道。這樣,呼叫在時間上和頻率上就被分開,減少了呼叫信道擁塞的可能性。在同一時間監(jiān)聽同一信道的組稱為一個駐留組。文獻(xiàn)[2]中規(guī)定,一個駐留組在一個信道上的停留時間為5.4秒,該時間稱為一個駐留時間。
2.2 同步管理協(xié)議數(shù)據(jù)單元
同步管理協(xié)議中用到的協(xié)議數(shù)據(jù)單元(PDU)均為26bit格式的數(shù)據(jù),其同步管理的PDU結(jié)構(gòu)如圖1所示。主要包括:呼叫PDU(LE_Call PDU)、同步校驗(yàn)PDU(LE_ Sync Check PDU,即命令字=“100”的握手PDU)、組時間廣播PDU(LE_GTB PDU)和同步補(bǔ)償PDU(LE_Timeoffset PDU)。
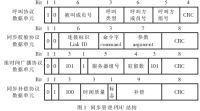
LE_GTB PDU主要用于初始時間的發(fā)布,完成各站點(diǎn)與時間服務(wù)器的首次校準(zhǔn);LE_Sync Check PDU和LE_Timeoffset PDU在第2次校準(zhǔn)時間的過程中發(fā)揮著重要作用:主叫站點(diǎn)(被校準(zhǔn)方)發(fā)送LE_ Sync Check PDU,請求時間校驗(yàn),被叫站點(diǎn)(校準(zhǔn)方)回應(yīng)LE_ Timeoffset PDU,給出時間差度。主叫站點(diǎn)接收到LE_ Timeoffset PDU后,利用該接收到PDU的理論時間和實(shí)際時間的差值進(jìn)一步調(diào)整本地時鐘的時間。二次校準(zhǔn)完成網(wǎng)絡(luò)時鐘的同步。
3 HF-3G同步協(xié)議實(shí)現(xiàn)
整個HF-3G系統(tǒng)多線程示意圖如圖2所示。
應(yīng)用層線程為應(yīng)用程序啟動的主線程,提供接口接收用戶消息(如發(fā)起呼叫、接收呼叫、獲取并發(fā)送用戶數(shù)據(jù)、中止通信等),同時顯示接收到的數(shù)據(jù)和其他底層狀態(tài)信息。此外,應(yīng)用層還負(fù)責(zé)基本的設(shè)置,包括同步方式、站點(diǎn)的身份(一般站點(diǎn)或時間服務(wù)器)、時間不確定度" title="不確定度">不確定度等。
鏈路層" title="鏈路層">鏈路層線程是系統(tǒng)的主要工作線程,負(fù)責(zé)鏈路建立、信道自適應(yīng)等工作;物理層線程受鏈路層的控制,負(fù)責(zé)收發(fā)數(shù)據(jù),分為接收線程和發(fā)送線程;解碼線程負(fù)責(zé)將收到的數(shù)據(jù)解碼并解析,通知鏈路層所收PDU類型以便鏈路層做出相應(yīng)的處理。同步線程是本文的重點(diǎn),下面將詳細(xì)介紹該線程的實(shí)現(xiàn)。
3.1 同步功能模塊劃分
HF-3G同步功能模塊主要包括GPS時間獲取模塊、同步初始化模塊、同步校驗(yàn)握手模塊、異步站點(diǎn)入網(wǎng)模塊和時間不確定度檢查模塊。
GPS時間獲取模塊是外部時鐘同步模塊,完成本地時間與GPS或者UTC的時間校準(zhǔn)。這部分不是同步協(xié)議實(shí)現(xiàn)的必須模塊,只作為與同步協(xié)議并行部分保留。
同步初始化模塊是初始時間發(fā)布模塊,完成初始時間的發(fā)布和獲得。協(xié)議規(guī)定,首先主時間服務(wù)器以異步模式進(jìn)行初次時間發(fā)布,網(wǎng)絡(luò)進(jìn)入同步運(yùn)行模式。在接下來的32個駐留時間內(nèi),完成駐留組時間服務(wù)器與網(wǎng)絡(luò)主時間服務(wù)器的時間校準(zhǔn)。而后,在組時間服務(wù)器完成本組內(nèi)的首次初始時間發(fā)布,再用60個駐留時間來完成駐留組的成員與所對應(yīng)的組時間服務(wù)器的同步校驗(yàn)握手,校準(zhǔn)本地時間。
同步校驗(yàn)握手模塊在網(wǎng)絡(luò)允許的時間漂移范圍內(nèi)完成主叫站點(diǎn)的時間校準(zhǔn)工作。
異步站點(diǎn)入網(wǎng)模塊,完成在網(wǎng)絡(luò)同步之后接入網(wǎng)絡(luò)的站點(diǎn)與網(wǎng)絡(luò)時間的校準(zhǔn)和同步;或者幫助網(wǎng)絡(luò)時間漂移超過網(wǎng)絡(luò)所允許范圍的站點(diǎn)重新同步。
時間不確定度檢查模塊保持系統(tǒng)的時間不確定度小于規(guī)定的范圍,超過額度則發(fā)起中斷,執(zhí)行同步校驗(yàn)握手模塊功能,如果時間不確定度超過同步校驗(yàn)握手模塊所能校準(zhǔn)的范圍則執(zhí)行后入網(wǎng)站點(diǎn)模塊,保證本地時間的準(zhǔn)確度。
3.2 同步管理多線程實(shí)現(xiàn)
在HF-3G同步管理協(xié)議中,有三種不同的功能角色:主時間服務(wù)器、組內(nèi)時間服務(wù)器和組內(nèi)成員。為了清晰劃分功能,系統(tǒng)中分別采用三個線程來實(shí)現(xiàn)三種不同的功能。其同步管理多線程實(shí)現(xiàn)示意圖如圖3所示。在系統(tǒng)啟動時,用戶可在界面上選擇不同角色以完成不同線程的啟動。

(1)主時間服務(wù)器同步線程
主時間服務(wù)器不進(jìn)行同步掃描,只在固定的信道上接收和發(fā)送PDU。其主要功能是在初始啟動時進(jìn)行初始時間發(fā)布。完成網(wǎng)絡(luò)同步后,等待同步校驗(yàn)握手請求和異步入網(wǎng)請求。
(2)組內(nèi)時間服務(wù)器同步線程
組內(nèi)時間服務(wù)器的主要功能是在初始時間發(fā)布中先與主時間服務(wù)器進(jìn)行校準(zhǔn),然后與組內(nèi)成員進(jìn)行校準(zhǔn);網(wǎng)絡(luò)同步后,根據(jù)同步校驗(yàn)握手請求、異步入網(wǎng)請求等做出相應(yīng)操作,同時,保持本地時鐘同步。
(3)組內(nèi)成員同步線程
組內(nèi)成員同步線程初始處于掛起狀態(tài),當(dāng)接收到主時間服務(wù)器發(fā)來的通知PDU后,啟動同步線程,獲得初始時間并校準(zhǔn);本地同步后,等待異步入網(wǎng)請求并保持本地時鐘的同步。
3.3 協(xié)議的改進(jìn)
原協(xié)議的LE_GTB PDU格式即為圖1中組時間廣播協(xié)議數(shù)據(jù)單元。其中4位駐留為廣播時間服務(wù)器駐留計(jì)數(shù)器的低四位,一個駐留時間為5.4秒,則時間校準(zhǔn)范圍(允許校準(zhǔn)前與時間服務(wù)器之間的最大時間差)可以達(dá)到23×5.4秒,即43.2秒。實(shí)現(xiàn)中,機(jī)器的初始時間差在大部分情況下都大于43.2秒,該P(yáng)DU格式不能滿足系統(tǒng)要求。
主時間服務(wù)器在發(fā)布時間時不會用到分組信息,所以本文將主時間服務(wù)器廣播的LE_GTB PDU稍作調(diào)整后稱之為LE_MGTB PDU,如圖4所示,將LE_GTB PDU中的駐留和服務(wù)組號域合并為9bit的新駐留域,來傳遞主時間服務(wù)器中駐留數(shù)計(jì)數(shù)器的低9位。這樣,時間校準(zhǔn)范圍可以達(dá)到28×5.4秒,即1382.4秒,基本滿足了系統(tǒng)實(shí)現(xiàn)的需求。

LE_MGTB是在一個駐留的最后時隙" title="時隙">時隙發(fā)布的,這樣,經(jīng)過主時間服務(wù)器的初始時間廣播后,網(wǎng)內(nèi)站點(diǎn)的時間差能保持在一個時隙內(nèi)。因此,在組內(nèi)廣播LE_GTB PDU時用4bit的精度能滿足要求,無需修改。
在初始時間發(fā)布的時候,協(xié)議中規(guī)定在第1次初始時間后,整個網(wǎng)絡(luò)的再次校驗(yàn)握手將持續(xù)(32+1+60)個駐留時間,即502.2秒。具體過程如圖3。這種設(shè)置是針對飽和網(wǎng)絡(luò)(共有32個駐留組,每組有不包括時間服務(wù)器的60個獨(dú)立站點(diǎn))所設(shè)計(jì)的,這對小型網(wǎng)絡(luò)是極大的浪費(fèi)。
如果網(wǎng)絡(luò)中站點(diǎn)的個數(shù)及分組信息可知(這在實(shí)際應(yīng)用中可以得到),則可以將主時間服務(wù)器與組時間服務(wù)器的時間校準(zhǔn)時間TMG設(shè)置為:
TMG=Ngroup×Tdwell
其中,Ngroup為駐留組數(shù),Tdwell為駐留時間。
而各個組內(nèi)部的校驗(yàn)時間TGSi設(shè)為:
TGSi=Nstation×Tdwell
其中,Nstation為每組內(nèi)站點(diǎn)數(shù)目。
再次校驗(yàn)握手時間Tagain為:
Tagain=TMG+ (TGSi)+TGT
(TGSi)+TGT
其中TGT為組時間服務(wù)器初次時間發(fā)布所用時間。
以站點(diǎn)數(shù)分別為80、850和1 920為例,假定站點(diǎn)均勻分配到各駐留組,不考慮網(wǎng)絡(luò)延時,信息速率為7 200bps,改進(jìn)前后完成初始時間發(fā)布所需時間對照表如表1所示。其中,TMT=0.61333×Ndwell為主時間服務(wù)器首次發(fā)布初始時間所需時間,Ttotal為整個初始時間發(fā)布的總時間,T為改進(jìn)前的時間,T′為改進(jìn)后的時間。可見改進(jìn)后的初始時間發(fā)布對于中小型網(wǎng)絡(luò)完成同步速度有很大提高。
同步管理協(xié)議的實(shí)現(xiàn)為3G-HF同步網(wǎng)絡(luò)的實(shí)現(xiàn)奠定了基礎(chǔ),它在無法獲得外部時間基準(zhǔn)的情況下保證同步網(wǎng)絡(luò)正常運(yùn)行的關(guān)鍵。本文在同步管理協(xié)議在初時間發(fā)布后,經(jīng)過進(jìn)一步同步校準(zhǔn)握手可使時間精度達(dá)到450毫秒(半個時隙)以內(nèi),完全滿足了短波通信網(wǎng)絡(luò)的同步通信要求。
本文的同步時鐘校準(zhǔn)方法具有通用性,可以根據(jù)具體的物理?xiàng)l件修改本同步管理協(xié)議的參數(shù),使其適用于其他需要同步時鐘而無法獲得外部時間的無線通信網(wǎng)絡(luò)。
參考文獻(xiàn)
1 US Department of Defence.Interoperability and performance standards for medium and high frequency radio systems.MIL-STD-188-141B,1999
2 US Department of Defence.MIL-STD-188-141B Notice of Change.2001
3 Johnson E E.Analysis of Third-Generation HF ALE tech-nology.MILCOM,2000
4 李蕙江.短波自動鏈路建立研究與實(shí)現(xiàn).碩士學(xué)位論文.北京:清華大學(xué),2005