
引 言
風(fēng)是研究大氣動力學(xué)和氣候變化的一個重要參量,利用風(fēng)的數(shù)據(jù),可以獲得大氣的變化,并預(yù)見其改變,促進人類對能量、水、氣溶膠、化學(xué)和其它空氣物質(zhì)圈的了解,提高氣象分析和預(yù)測全球氣候變化的能力。目前的風(fēng)場數(shù)據(jù)主要來源于無線電探空測風(fēng)儀、地面站、海洋浮標、觀測船、飛行器以及衛(wèi)星,它們在覆蓋范圍和觀測頻率上都存在很大限制。對全球進行直接三維風(fēng)場測量已經(jīng)提到日程上來,世界氣象組織提出了全球范圍的高分辨率大氣風(fēng)場數(shù)據(jù)的迫切需要,迄今為止,多普勒測風(fēng)激光雷達是唯一能夠獲得直接三維風(fēng)場廓線的工具,具有提供全球所需數(shù)據(jù)的發(fā)展?jié)摿1]。
激光雷達是探測大氣的有力工具,隨著激光技術(shù)、光學(xué)機械加工技術(shù)、信號探測、數(shù)據(jù)采集以及控制技術(shù)的發(fā)展,激光雷達技術(shù)的發(fā)展也日新月異。多普勒測風(fēng)激光雷達具有實用性、高分辨率和三維觀測等優(yōu)點,是其它探測手段難以比擬的[2, 3, 4]。
新研制的1064 nm直接探測多普勒測風(fēng)激光雷達,利用雙邊緣技術(shù)對對流層三維風(fēng)場進行探測[5]。本文介紹了該激光雷達的總體結(jié)構(gòu)及其各部分的功能,并對其探測對流層風(fēng)場的初步結(jié)果進行了分析和討論。
1 總體結(jié)構(gòu)和技術(shù)參數(shù)
1064 nm直接探測多普勒測風(fēng)激光雷達從整體上由激光發(fā)射單元、二維掃描單元,回波信號接收單元、信號探測和數(shù)據(jù)采集單元及控制單元五部分組成,其結(jié)構(gòu)示意圖和外觀照片分別見圖1和圖2,主要的技術(shù)參數(shù)見表1。
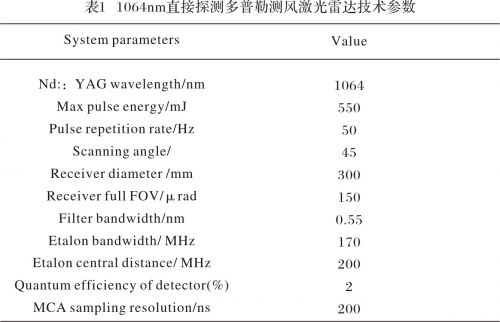

激光發(fā)射單元、回波信號接收單元、信號探測和數(shù)據(jù)采集單元放置在光學(xué)平臺上,保證其光學(xué)穩(wěn)定性。Nd:YAG激光器的中心波長是1064 nm,工作在此波長,可以有較大的激光輸出功率,并且氣溶膠的后向散射截面比較大。脈沖重復(fù)頻率為50 Hz,可以節(jié)省探測的時間,能捕捉短時間內(nèi)風(fēng)速的變化,有利于提高風(fēng)速探測的準確度。同時,激光器內(nèi)部注入種子激光可以保證激光器的頻率穩(wěn)定。
二維掃描單元安置在實驗房的房頂,接收望遠鏡的上方。由兩個鍍有1064 nm波長全反的介質(zhì)膜的平面反射鏡、水平旋轉(zhuǎn)機構(gòu)和垂直旋轉(zhuǎn)機構(gòu)組成的大口徑光學(xué)潛望式結(jié)構(gòu)。通過軟件控制或者手動調(diào)節(jié)能夠全方位掃描,水平方向可以旋轉(zhuǎn) 0o至360o,垂直方向可以旋轉(zhuǎn)0o至180o。進行常規(guī)探測時采用四波束法,水平方位依次按照0o、90o、180o和270o四個方位探測,即東、南、西和北四個方位,工作仰角為45o。
接收望遠鏡在二維掃描單元的正下方,有效通光口徑為300 mm,如圖1所示。主鏡鍍有1064 nm波長全反的介質(zhì)膜,反射率高達99%。望遠鏡接收的大氣后向散射回波信號耦合至光纖,由光纖導(dǎo)入到準直鏡后成為平行光,經(jīng)過壓制背景光的窄帶濾光片后,由20%反射、80%透射的分束片分成兩部分。20%的反射信號作為能量探測,由直角反射棱鏡分成兩束,分別由光子計數(shù)探測器接收;80%的透射信號作為信號探測,經(jīng)過雙Fabry-Perot標準具的兩個通道后,由于透過率的不一樣,得到強度不等的兩束光信號,由直角反射棱鏡分為兩束,由相應(yīng)的光子計數(shù)探測器接收。四個光子計數(shù)探測器分別將光信號轉(zhuǎn)換為電信號后,輸入光子計數(shù)卡內(nèi),最后由工控機中的主程序?qū)Σ杉臄?shù)據(jù)進行儲存和處理,并實時顯示測量的信號強度廓線、風(fēng)速和風(fēng)向。
控制柜內(nèi)安裝有工控機,其內(nèi)安裝的1064nm直接探測多普勒測風(fēng)激光雷達的系統(tǒng)運行控制軟件通過RS232串口控制激光器、二位掃描單元和雙Fabry-Perot標準具工作,起著系統(tǒng)的整體協(xié)調(diào)作用。控制柜內(nèi)還有雙Fabry-Perot標準具的控制器 CS100、二位掃描單元的控制器、門控裝置以及同軸系統(tǒng)對光時使用的監(jiān)視器和各部件的電源。
2 雙Fabry-Perot標準具的透過率響應(yīng)曲線的測量
1064nm直接探測多普勒測風(fēng)激光雷達的關(guān)鍵技術(shù)之一就是采用高分辨率的雙Fabry-Perot標準具,它在一對基板上通過鍍膜或沉積方式形成兩個面積和大小相同的半圓形干涉儀,根據(jù)鍍膜的厚度可以形成標準具的兩個通道頻譜中心分離,形成透過率響應(yīng)曲線的交疊。由于它們固定在一個基板上,雙 Fabry-Pero標準具的兩個通道的中心頻率的相對位置受溫度的漂移變化相同,保證標準具的頻譜中心間隔大小恒定。
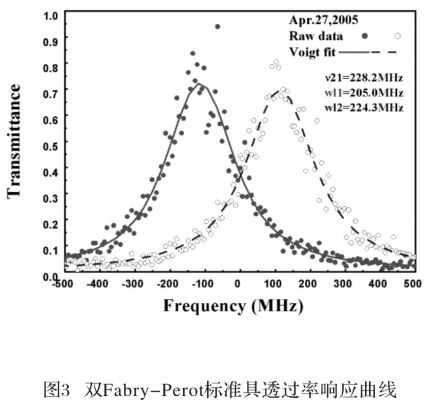
雙Fabry-Perot標準具的透過率曲線的測量是通過系統(tǒng)運行控制軟件的CS100控制子程序?qū)ζ淝婚L大小的控制,從而得到頻率與透過率的對應(yīng)曲線。圖3是2005年4月27日19:04,500個脈沖累加平均測量得到的雙Fabry-Perot標準具的透過率曲線,通道一(實圓點)與通道二(虛圓點)的頻譜中心間隔為228.2 MHz,半寬度分別為 205.0 MHz和224.3 MHz,實曲線與虛曲線分別為兩通道的相應(yīng)擬合曲線,其峰值透過率分別為73.7% 和70.8%,測量結(jié)果與表1對應(yīng)的技術(shù)參數(shù)基本一致。
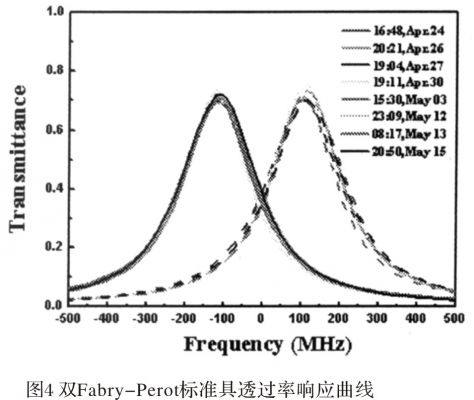
由于環(huán)境因素引起光學(xué)單元和電子器件的漂移,而且操作人員的活動可能引起接收機部件的振動而造成雙Fabry-Perot標準具的腔長漂移,以及激光器長時間工作引起頻率的漂移,都對標準具透過率曲線的測量產(chǎn)生影響。為了檢驗雙Fabry-Perot標準具的性能,從2005年4月24日至2005年5月 15日內(nèi),進行了8次測量,透過率響應(yīng)曲線如圖4,實曲線和虛曲線分別對應(yīng)通道一和通道二的透過率響應(yīng)曲線。從圖中可以看出,雖然時間相距21天,但是8 組透過率響應(yīng)曲線的重合度很好,說明系統(tǒng)的穩(wěn)定性很好。
3 對流層風(fēng)場的初步結(jié)果
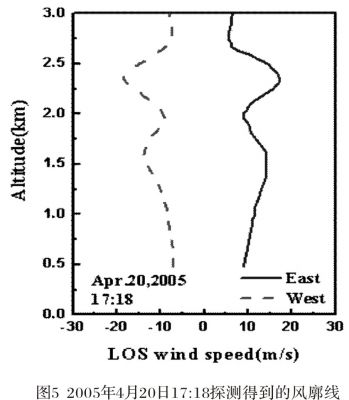
圖5給出了1064 nm直接探測多普勒測風(fēng)激光雷達2005年4月20日17:18在合肥地區(qū)測量到的0.48 km至3 km的風(fēng)廓線。圖中虛圓點和實圓點線分別是二維掃描單元指向東和西測量得到的風(fēng)廓線,由于當(dāng)天是東風(fēng),向東方向測量得到的多普勒頻移為正值,對應(yīng)的風(fēng)速亦為正值;向西方向測量得到的多普勒頻移為負值,對應(yīng)的風(fēng)速則為負值,且二者在不同高度上的風(fēng)速體現(xiàn)了較好的一致性,這表明大氣風(fēng)場在測風(fēng)激光雷達探測時間內(nèi)不同高度上的風(fēng)向和風(fēng)速都沒有什么大的變化。
圖6給出了1064 nm直接探測多普勒測風(fēng)激光雷達2005年9月10日晚上在同一地點探測得到的徑向風(fēng)速的廓線。
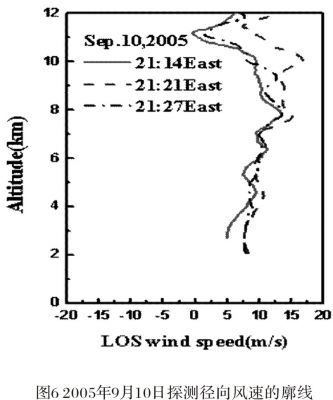
該激光雷達的二維掃描單元工作仰角45o,方位指向東,距離分辨率為30m,進行了10000個脈沖累加平均。可以看出連續(xù)測量的3組數(shù)據(jù)趨勢基本一致,從2km至8km風(fēng)速變化不大,大氣相對運動比較穩(wěn)定,大體呈現(xiàn)一個增加趨勢,在8 km左右達到一個最大風(fēng)速約15 m/s。8km以上,風(fēng)速呈現(xiàn)遞減趨勢。夜晚的探測距離可以達到9km。
4 結(jié)束語
介紹了自行研制的1064 nm直接探測多普勒測風(fēng)激光雷達的總體結(jié)構(gòu)和技術(shù)參數(shù),系統(tǒng)地敘述了各部分的結(jié)構(gòu)和功能。該激光雷達正在合肥進行對流層徑向風(fēng)速的初步探測,并取得了初步的測量結(jié)果。實驗結(jié)果表明該激光雷達系統(tǒng)性能穩(wěn)定,夜晚的探測高度可以達到9km。它的成功研制為進一步開展各領(lǐng)域內(nèi)測風(fēng)激光雷達的開發(fā)與應(yīng)用奠定了堅實的技術(shù)基礎(chǔ)。