
摘 要: 提出了一種分布式的PIM-SM" title="PIM-SM">PIM-SM組播" title="組播">組播實現(xiàn)方案" title="實現(xiàn)方案">實現(xiàn)方案。將PIM-SM控制平面與數(shù)據(jù)平面功能分離,數(shù)據(jù)平面功能利用TCAM+FPGA的硬件方式實現(xiàn),達到快速數(shù)據(jù)轉(zhuǎn)發(fā)的目的,控制平面功能由軟件在主控完成,數(shù)據(jù)平面與控制平面之間通過高速內(nèi)部網(wǎng)絡(luò)進行通信。經(jīng)過實際的測試表明,該方案在保證協(xié)議功能一致性的前提下,能夠大大提高組播數(shù)據(jù)轉(zhuǎn)發(fā)性能,使數(shù)據(jù)達到10G接口的線速轉(zhuǎn)發(fā)能力,是一種高效可行的PIM-SM組播實現(xiàn)方案。
關(guān)鍵詞: 分布式 PIM-SM組播 TCAM+FPGA 線速轉(zhuǎn)發(fā)
在寬帶網(wǎng)絡(luò)的建設(shè)和運營中,業(yè)務(wù)是先導(dǎo)和核心。其中組播業(yè)務(wù)作為最具潛力的未來業(yè)務(wù)之一,已經(jīng)得到了前所未有的重視。IP組播技術(shù)具有獨特的優(yōu)越性:在組播網(wǎng)絡(luò)中,即使用戶數(shù)量成倍增長,主干帶寬也不需要隨之增加。隨著寬帶技術(shù)的不斷發(fā)展,F(xiàn)TP、HTTP、SMTP等傳統(tǒng)的數(shù)據(jù)業(yè)務(wù)已無法滿足人們對信息的需求,而視頻點播、遠程教學(xué)、新聞發(fā)布、網(wǎng)絡(luò)電視等將成為各大運營商爭相發(fā)展的新型業(yè)務(wù),這些業(yè)務(wù)都可以利用組播實現(xiàn),使得IP組播技術(shù)成為當前網(wǎng)絡(luò)技術(shù)中的研究熱點之一。為此,人們開發(fā)了多種組播路由協(xié)議" title="路由協(xié)議">路由協(xié)議來支持組播的應(yīng)用,而PIM-SM是目前應(yīng)用最廣泛、功能最強大的一種,適合廣域網(wǎng)環(huán)境下用戶比較分散的組播業(yè)務(wù)的開展。美國UC-Berkeley最早于1990年初開始在MBone上研究基于組播的協(xié)同環(huán)境,國內(nèi)也于20世紀90年代后期開始研究和應(yīng)用組播視頻會議。2004年4月,在CERNET主干網(wǎng)絡(luò)8個城市10個地區(qū)主節(jié)點之間成功配置了全程組播(Native multicast)。2003年SARS之后,開始向38個省級主節(jié)點擴展,其中主要實現(xiàn)了基于PIM-SM的組播視頻會議業(yè)務(wù)。實現(xiàn)高性能PIM-SM組播將會對未來實現(xiàn)大規(guī)模組播應(yīng)用產(chǎn)生深遠而重要的影響。
PIM-SM組播通常采用純軟件或者利用ASIC、NP等硬件方式轉(zhuǎn)發(fā)。純軟件方式常用于中低端路由器,在轉(zhuǎn)發(fā)性能上難以滿足核心路由器的要求;由于PIM-SM協(xié)議還未完全定型,ASIC轉(zhuǎn)發(fā)方式難以更新升級,并且開發(fā)周期長不適合在研發(fā)階段采用;而NP方式雖然開發(fā)效率高但技術(shù)成熟度低。為此,本文提出了一種PIM-SM分布式實現(xiàn)方案。該方案以筆者研發(fā)的T比特級路由器為平臺,將PIM-SM控制平面與數(shù)據(jù)平面分離,控制平面在路由器的主控上利用軟件方式實現(xiàn),而數(shù)據(jù)平面利用TCAM+FPGA的方式在路由器的轉(zhuǎn)發(fā)子系統(tǒng)上實現(xiàn)。考慮到路由查表" title="查表">查表的特性,將轉(zhuǎn)發(fā)表存放在商用TCAM芯片中,可以充分利用TCAM的關(guān)鍵字查找優(yōu)勢,利用FPGA程序?qū)崿F(xiàn)轉(zhuǎn)發(fā)處理邏輯。這樣的設(shè)計方式開發(fā)簡單,成本較低,靈活性強。其實現(xiàn)模型如圖1所示。
1 實現(xiàn)難點分析
考察近幾年的路由器技術(shù)發(fā)展,單播路由協(xié)議采用硬件轉(zhuǎn)發(fā)、軟件維護已經(jīng)不是新的方案。這是因為單播路由表類型比較單一,存放的是下一跳、網(wǎng)絡(luò)度量、出接口等固定長度的信息,而且協(xié)議控制平面與數(shù)據(jù)平面功能劃分清晰。數(shù)據(jù)平面只用來轉(zhuǎn)發(fā)而不影響協(xié)議機制的運行,它使用的轉(zhuǎn)發(fā)表只需要簡單的目的地址和出接口信息(只有一個),其工作就是對到來的數(shù)據(jù)包進行目的地址的匹配,然后根據(jù)匹配結(jié)果直接轉(zhuǎn)發(fā)即可。因此,單播協(xié)議的轉(zhuǎn)發(fā)功能采用硬件方式實現(xiàn)較容易,只需簡單的硬件轉(zhuǎn)發(fā)表和判定邏輯對數(shù)據(jù)進行處理,然后交給調(diào)度模塊直接輸出即可。
PIM-SM實現(xiàn)方案的設(shè)計可以借鑒單播路由協(xié)議的硬件轉(zhuǎn)發(fā)模式。但是,它實現(xiàn)硬件轉(zhuǎn)發(fā)比單播協(xié)議硬件轉(zhuǎn)發(fā)困難得多。其主要困難如下:
(1)組播轉(zhuǎn)發(fā)過程較為復(fù)雜,輸入輸出項多且輸出項不定長。PIM-SM組播路由協(xié)議的路由表項類型不單一,多達四種且有匹配優(yōu)先順序,數(shù)據(jù)包的匹配查找邏輯相當復(fù)雜。
(2)組播轉(zhuǎn)發(fā)表容量龐大,表項寬。受器件水平的限制,硬件實現(xiàn)方案中可能根據(jù)可用器件的情況設(shè)計多級轉(zhuǎn)發(fā)表,而多級查表又限制了硬件實現(xiàn)方案速度優(yōu)勢的發(fā)揮。
(3)與單播轉(zhuǎn)發(fā)相比,數(shù)據(jù)包需要硬件復(fù)制和交換轉(zhuǎn)發(fā)。組播轉(zhuǎn)發(fā)不僅大大增加了路由器轉(zhuǎn)發(fā)模塊的復(fù)雜度,而且還增加了調(diào)度模塊和接口模塊的復(fù)雜度。
(4)一些利用軟件容易解決的問題,可能利用硬件實現(xiàn)就比較困難,例如轉(zhuǎn)發(fā)查表、RPF檢查、數(shù)據(jù)驅(qū)動報文處理等。
(5)組播路由協(xié)議尚不完善,組播應(yīng)用還未普及,可以預(yù)見在未來的幾年中,隨著組播應(yīng)用的發(fā)展,IPv4組播路由協(xié)議還要不斷改進和完善。目前IPv6組播路由協(xié)議還未有標準,但是轉(zhuǎn)發(fā)設(shè)計必須考慮基于IPv6的實現(xiàn)方式。
這些由協(xié)議特性造成的與單播路由協(xié)議硬件轉(zhuǎn)發(fā)的不同之處,也是PIM-SM實現(xiàn)硬件轉(zhuǎn)發(fā)的復(fù)雜之處。這種復(fù)雜性在具體設(shè)計和實現(xiàn)時雖然在一定程度上會增加硬件轉(zhuǎn)發(fā)設(shè)計的復(fù)雜度,但是只要合理設(shè)計,采用正確的技術(shù)手段和策略,硬件轉(zhuǎn)發(fā)的性能優(yōu)勢是很明顯的。
2 方案設(shè)計
經(jīng)過分析,不難得出關(guān)于PIM-SM分布式實現(xiàn)方案的大致輪廓。方案總體上可以分為數(shù)據(jù)平面轉(zhuǎn)發(fā)設(shè)計、控制平面實現(xiàn)方式設(shè)計和平面間通信方式設(shè)計三個部分。其中,數(shù)據(jù)平面轉(zhuǎn)發(fā)部分的設(shè)計是整個方案的關(guān)鍵和難點,影響著PIM-SM組播的轉(zhuǎn)發(fā)性能,其主要難點是轉(zhuǎn)發(fā)表格式和轉(zhuǎn)發(fā)邏輯的設(shè)計,在T比特路由器的轉(zhuǎn)發(fā)子系統(tǒng)上實現(xiàn)。協(xié)議軟件部分負責(zé)控制平面的協(xié)議行為,應(yīng)該在T比特路由器的主控子系統(tǒng)上實現(xiàn),主要工作是維護協(xié)議狀態(tài)機的運行,與其他模塊進行交互,以及對路由表項的更新管理。平面間通信部分包括兩方面的工作:路由表下發(fā)和數(shù)據(jù)驅(qū)動報文上報。這兩部分包括判定、封裝、上報和處理等操作,涉及到主控和轉(zhuǎn)發(fā)兩方面的工作,也是比較復(fù)雜的一部分,需要通過高速內(nèi)部網(wǎng)絡(luò)進行通信。考慮到在T比特路由器上的實現(xiàn),PIM-SM實現(xiàn)方案的總體框圖如圖2所示。

圖2中只描繪了一個轉(zhuǎn)發(fā)的框圖,對于多個轉(zhuǎn)發(fā)的情況可以類推。
協(xié)議控制平面以及路由表管理部分在主控板上以軟件形式實現(xiàn),數(shù)據(jù)平面部分在T比特路由器的轉(zhuǎn)發(fā)板上利用硬件實現(xiàn),數(shù)據(jù)報文經(jīng)查表后直接轉(zhuǎn)發(fā)。主控與轉(zhuǎn)發(fā)之間通過高速網(wǎng)絡(luò)互聯(lián),數(shù)據(jù)驅(qū)動報文在轉(zhuǎn)發(fā)生成后通過該網(wǎng)絡(luò)上報給主控的協(xié)議軟件處理。
值得注意的是,協(xié)議報文必須上交給主控進行處理。因此,為減少轉(zhuǎn)發(fā)邏輯的復(fù)雜度可以將協(xié)議報文在線路接口部分判斷后直接通過內(nèi)部網(wǎng)絡(luò)上交給主控協(xié)議棧處理。這樣既可減少了硬件轉(zhuǎn)發(fā)部分的負擔(dān),又使協(xié)議報文的處理不會與數(shù)據(jù)報文的處理相混淆。
前面已經(jīng)提到過,影響數(shù)據(jù)高速轉(zhuǎn)發(fā)的關(guān)鍵因素是轉(zhuǎn)發(fā)表格式和查表轉(zhuǎn)發(fā)算法的設(shè)計。因此,必須從保證協(xié)議一致性的角度出發(fā)考慮哪些功能可以用硬件完成,哪些需要經(jīng)軟件計算后下發(fā)。這部分設(shè)計的正確與否不僅會影響協(xié)議一致性,而且會對轉(zhuǎn)發(fā)性能產(chǎn)生影響。經(jīng)過對協(xié)議轉(zhuǎn)發(fā)規(guī)則的細致分析以及針對本路由器體系結(jié)構(gòu)特點,提出了以下PIM-SM轉(zhuǎn)發(fā)表格式,如表1所示。該格式支持PIM-SM三種轉(zhuǎn)發(fā)項。
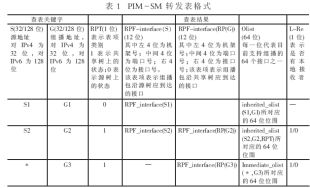
查表轉(zhuǎn)發(fā)算法包括三部分:查表、結(jié)果判別和轉(zhuǎn)發(fā)上報。查表部分負責(zé)數(shù)據(jù)包轉(zhuǎn)發(fā)表項的匹配,方式是針對數(shù)據(jù)包利用TCAM中存放的轉(zhuǎn)發(fā)表進行關(guān)鍵字匹配,輸出查表結(jié)果,如果失敗則丟棄數(shù)據(jù)包;結(jié)果判別部分包括RPF檢查、數(shù)據(jù)驅(qū)動報文判定、查表成敗判定等邏輯,根據(jù)查表結(jié)果信息進行判定;轉(zhuǎn)發(fā)上報部分包括正常數(shù)據(jù)包的轉(zhuǎn)發(fā)和數(shù)據(jù)驅(qū)動報文封裝上報等操作。其中查表部分相對復(fù)雜,時間耗費較多,利用FPGA程序?qū)崿F(xiàn)時需要考慮如何進行性能優(yōu)化,否則容易導(dǎo)致數(shù)據(jù)不能及時查表轉(zhuǎn)發(fā),達不到線速轉(zhuǎn)發(fā)的要求。數(shù)據(jù)驅(qū)動報文的封裝上報等操作可以采用硬件或者軟件實現(xiàn)。在路由器中硬件對組播的支持包括兩個方面:一是完成硬件查表轉(zhuǎn)發(fā),二是在硬件上支持組播復(fù)制。在組播復(fù)制的硬件實現(xiàn)中,將組播復(fù)制功能放到調(diào)度模塊實現(xiàn)。調(diào)度模塊收到轉(zhuǎn)發(fā)送來的組播報文后,根據(jù)轉(zhuǎn)發(fā)所貼標簽標識的目的端口號及復(fù)制數(shù)目進行相應(yīng)的復(fù)制,并直接送到相應(yīng)端口的FIFO。
3 線速轉(zhuǎn)發(fā)可行性分析
該分布式設(shè)計方案的目的是實現(xiàn)高速數(shù)據(jù)轉(zhuǎn)發(fā),目標是達到10G接口的線速轉(zhuǎn)發(fā)。根據(jù)以上設(shè)計需要估算一下能否達到線速轉(zhuǎn)發(fā)能力和主要限制因素。考慮到查表過程的時間耗費對轉(zhuǎn)發(fā)性能的影響最大,從這方面展開對線速轉(zhuǎn)發(fā)限制因素的分析。
3.1 線速轉(zhuǎn)發(fā)條件
線速轉(zhuǎn)發(fā)要求數(shù)據(jù)包的吞吐率在達到線路接口的最高值時不會丟包,即必須能及時處理所有的數(shù)據(jù)包,那么衡量的標準為查表的時間應(yīng)低于單個數(shù)據(jù)包的線速轉(zhuǎn)發(fā)時間。數(shù)據(jù)包越長,對應(yīng)的查表時間就越長,因此對短數(shù)據(jù)包的要求更為苛刻。要在數(shù)據(jù)速率高達10Gbps的條件下,實現(xiàn)常見最短組播數(shù)據(jù)包(長度為40字節(jié))的線速轉(zhuǎn)發(fā),則轉(zhuǎn)發(fā)處理一個數(shù)據(jù)包的最長時間為:
(IP報文長度)40×8bit/(端口速率)10Gbps=32ns。
表2給出了不同長度數(shù)據(jù)包的轉(zhuǎn)發(fā)最長時間。
假定商用TCAM芯片的時鐘為100MHz,每個時鐘周期長10ns,也就是說必須在4個時鐘周期內(nèi)完成查表轉(zhuǎn)發(fā),才能實現(xiàn)最短數(shù)據(jù)包的線速轉(zhuǎn)發(fā)。根據(jù)轉(zhuǎn)發(fā)表格式的設(shè)計,源地址和目的地址作為查表關(guān)鍵字存放于TCAM中,針對IPv4關(guān)鍵字長64bit,IPv6關(guān)鍵字長256bit,使用的TCAM為Netlogic公司的NSE5512,其容量為512k×72bit(即:若表項寬度為72位,則該容量(包括掩碼)為512k×72bit,事實上表項為256k條)。該器件的表項寬度可配置為72位、144位、288位和576位,表項配置為144位時,容量為128k條;配置為288位時,容量即為64k條。根據(jù)筆者設(shè)計的轉(zhuǎn)發(fā)表格式,組播表的查表關(guān)鍵字設(shè)為288位寬。
利用TCAM實現(xiàn)查表所需的總時間T可分為兩部分。一部分為查表關(guān)鍵字的輸入時間T1,例如對數(shù)據(jù)總線為72位的TCAM而言,288位查表關(guān)鍵字的輸入時間需要4個FPGA時鐘周期;另一部分為查表關(guān)鍵字搜索TCAM內(nèi)部表項從而得出查表結(jié)果所需的時間,也可以稱之為查表結(jié)果等待時間T2,目前業(yè)界比較先進的TCAM的等待時間通常為10個FPGA時鐘周期。因此,有:T=T1+T2=14。這說明,采用通常的查表方案在4個時鐘周期內(nèi)無法處理完最短包,10G接口的線速轉(zhuǎn)發(fā)無法得到。
3.2 優(yōu)化查表策略
為了實現(xiàn)10G接口的線速轉(zhuǎn)發(fā),必須設(shè)法使得轉(zhuǎn)發(fā)查表能在4個時鐘周期內(nèi)完成。而純粹的TCAM查表不能在4個時鐘周期內(nèi)完成,這就要求必須采用流水查表技術(shù)對查表實現(xiàn)方案進行優(yōu)化。這樣,一種由TCAM和SRAM共同完成的路由查表流水線方案在此處可以得到應(yīng)用。該流水查表方案中,TCAM表項僅存儲查表關(guān)鍵字,查表結(jié)果則存儲在相應(yīng)地址的SRAM中。組播查表過程被分解成為三級流水級。其中,一級關(guān)鍵字是組播查表關(guān)鍵字,該關(guān)鍵字格式應(yīng)為(S,G),一級關(guān)鍵字的查表利用TCAM實現(xiàn);二級關(guān)鍵字是TCAM中表項最低匹配地址,二級關(guān)鍵字的查表利用SRAM實現(xiàn);二級關(guān)鍵字查表結(jié)果為最終結(jié)果,即出接口等信息。則查表流水線如圖3所示。

流水線的功能段完成該段任務(wù)所需的時間即為功能段延遲時間,表3列出了IPv4/IPv6組播數(shù)據(jù)包查表時各功能段的時間延遲。由該表可知,該查表流水線中延遲時間最長的段為“TCAM查表關(guān)鍵字輸入”,需要4個FPGA時鐘周期。

目前,在FPGA和TCAM、SRAM器件允許的條件下,該查表流水線結(jié)構(gòu)可以支持OC-192接口40字節(jié)組播包線速查表。該流水線已經(jīng)在T比特路由器上得到應(yīng)用,其具體設(shè)計方案不是本文討論的問題,只用來說明采用TCAM+FPGA方式能夠?qū)崿F(xiàn)10G接口線速轉(zhuǎn)發(fā),這一點將由實際測試得到證明。
關(guān)于硬件轉(zhuǎn)發(fā)性能的測試,RFC建議以最短報文來測試路由器的吞吐量。在同樣端口速率下轉(zhuǎn)發(fā)小包是對路由器包轉(zhuǎn)發(fā)能力最大的考驗。筆者進行了測試,測試端口包括10G WAN/LAN和10G POS,利用Spirent通信公司的AX/4000測試儀對該路由器依照RFC2544規(guī)定進行轉(zhuǎn)發(fā)性能測試。結(jié)果10G WAN/LAN接口40字節(jié)以上組播數(shù)據(jù)包均可達到線速轉(zhuǎn)發(fā),10G POS接口70字節(jié)以上可達到線速轉(zhuǎn)發(fā)。只要FPGA程序進一步優(yōu)化可以實現(xiàn)任意包長的線速轉(zhuǎn)發(fā)。本次測試的丟包率為0。64字節(jié)的包延遲僅為12.35μs。證明組播數(shù)據(jù)包能夠?qū)崿F(xiàn)10G線速轉(zhuǎn)發(fā),延遲很小,適合組播應(yīng)用。
本文結(jié)合國家863項目“可擴展到T比特的高性能IPv4/v6路由器基礎(chǔ)平臺及實驗系統(tǒng)”的要求,提出了一種可應(yīng)用于T比特路由器平臺的分布式PIM-SM組播實現(xiàn)方案,采用TCAM+FPGA方式實現(xiàn)了高速數(shù)據(jù)轉(zhuǎn)發(fā),并研究設(shè)計了轉(zhuǎn)發(fā)表格式和查表轉(zhuǎn)發(fā)算法,分析了該方式下線速轉(zhuǎn)發(fā)的可行性,并最終得到實際性能的驗證。總之,本文提出了一種實現(xiàn)相對簡單、高效可行的PIM-SM組播實現(xiàn)方案。它具有較強的創(chuàng)新性,該方案的設(shè)計思想不僅可以應(yīng)用于T比特路由器,同樣也適用于其他具有分布式結(jié)構(gòu)的高端路由器。
參考文獻
1 Estrin D,F(xiàn)arinacci D.Protocol independent multicast-sparse mode(PIM-SM):Protocol specification.RFC2362,1998;(6)
2 Savola P,Sonera T.PIM-SM multicast routing security issues and enhancements.Draft-ietf-mboned-mrou-tesec-00,2004
3 Deering S.Host extensions for IP multicasting.RFC1112,1989
4 Fenner W.Internet group man-agement protocol Version 2.RFC2236,1997
5 Fenner B,Handley M.Protocol independent multicastsparse mode(PIM-SM):Protocol specification (Revised).Draft-ietf- pim-sm-v2-new-05,2002
6 Stephen E,Deborah D,Estrin L.The PIM architecture for wide-Area multicast routing.IEEE/ACM Transactions on Networking,1996;4(2)
7 Estrin D,Handley M,Helmy A et al.A dynamic bootstrap mechanism for rendezvous-based multicast routing.In:Proced-dings of IEEE INFOCOM′99,1999
8 Haberman B,Sandick H.Protocol independent multicast rout-ing in the Internet Protocol Version 6(IPv6).Draft-ietf-pim-ipv6-03,2000
9 Bradne S,Mcquaid J.Benchmarking methodology for network interconnect devices.RFC2544,1999
10 Bhattacharyya B,Giuliano L.An overview of source-specific multicast(SSM).Draft-ietf-ssm-overview-03,2002
11 Bhattacharyya S.An Overview of source-specific multicast (SSM).RFC3569,2003
12 Kim D,Meyer D.Anycast rendevous point(RP) mechanism using protocol independent multicast(PIM) and multicast source discovery protocol(MSDP).RFC3446,2003