
霍爾效應(yīng)及其非線性修正(圖)
摘要: 通過非線性修正,,此設(shè)計(jì)的霍爾電流傳感器具備了較高的精度和良好的線性度,實(shí)用性強(qiáng)。通過實(shí)驗(yàn)和理論分析,文中設(shè)計(jì)的電路能找出霍爾傳感器的最佳線性工作狀態(tài),并消除不平衡電壓,。
Abstract:
Key words :
霍爾效應(yīng)
當(dāng)一塊通有電流的金屬或半導(dǎo)體薄片垂直地放在磁場中時,薄片的兩端就會產(chǎn)生電位差,這種現(xiàn)象就稱為霍爾效應(yīng),。兩端具有的電位差值稱為霍爾電勢UH,,其表達(dá)式為
UH=K·Ia·B/d
UH=K·Ia·B/d
其中K為霍爾系數(shù),Ia為薄片中通過的電流,,B為外加磁場(洛倫茲力Lorrentz)的磁感應(yīng)強(qiáng)度,,d是薄片的厚度。由此可見,,霍爾效應(yīng)的靈敏度高低與外加磁場的磁感應(yīng)強(qiáng)度成正比的關(guān)系,。其中,磁場中金屬板的霍爾效應(yīng),,純金屬的霍爾系數(shù)比較小,,而半導(dǎo)體材料的霍爾系數(shù)要大幾個數(shù)量級,因此一般使用硅,、鍺,、砷化銦、銻化銦等半導(dǎo)體材料作為霍爾元件,。
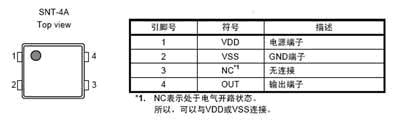
圖1 S-5711ANDL-I4T1G引腳排列圖
其中,,無接觸傳感將是大勢所趨,在無接觸型傳感器中,,憑借著高可靠性等優(yōu)勢,,霍爾效應(yīng)傳感器(Hall Effect Sensor)在汽車領(lǐng)域也贏得廣泛的應(yīng)用空間?;魻栯娏鱾鞲衅鞯膬?yōu)點(diǎn)是電路形式簡單,,成本相對較低。缺點(diǎn)是精度,,線性度較差,,響應(yīng)時間較慢,溫度漂移較大,。本文主要針對霍爾電流傳感器的非線性問題討論了減小非線性度的修正方法,。
修正方法分析
1 S-5711A簡介
S-5711A系列是采用CMOS技術(shù)開發(fā)的高靈敏度,、低消耗電流的霍爾IC(磁性開關(guān)IC),。可檢測出磁束密度的強(qiáng)度,,使輸出電壓發(fā)生變化,。通過與磁石的組合,可進(jìn)行各種設(shè)備的開/關(guān)檢測,。
①S-5711ANDL-I4T1G引腳排列圖如圖1所示,。
②S-5711A工作特性
S-5711A系列霍爾集成傳感器的工作特性曲線如圖2所示。若將磁石靠近傳感器IC,,針對此IC的標(biāo)記面,,當(dāng)垂直方向的磁束密度超過BOPN或BOPS時,,VOUT從“H”轉(zhuǎn)變?yōu)?/span>“L”;若將磁石遠(yuǎn)離此IC,,當(dāng)磁束密度低于BRPN或BRPS時,,VOUT從“L”轉(zhuǎn)變?yōu)?/span>“H”。
由霍爾開關(guān)集成傳感器的一般工作特性可知,,磁滯BH對開關(guān)動作的可靠性非常有利,。霍爾開關(guān)集成傳感器的工作特性曲線反映了外加磁場與傳感器輸出電平的關(guān)系,。當(dāng)外加磁感應(yīng)強(qiáng)度大于“開”的磁感應(yīng)強(qiáng)度時,,輸出電平由高變低,傳感器處于開狀態(tài),。當(dāng)外加磁感應(yīng)強(qiáng)度小于釋放點(diǎn)“關(guān)”的磁感應(yīng)強(qiáng)度時,輸出電平由低變高,,傳感器處于關(guān)狀態(tài),。
此類傳感器的優(yōu)點(diǎn)是:不受磁石極性影響,可減少在生產(chǎn)組裝時的人為出錯,;從機(jī)械式轉(zhuǎn)到IC開關(guān),,其消耗電流低也是一個優(yōu)點(diǎn)。而其應(yīng)用環(huán)境也很廣泛,,主要包括手機(jī)(滑蓋/開合蓋/翻蓋)等須以感應(yīng)開合蓋或開合組件實(shí)現(xiàn)整機(jī)系統(tǒng)或模塊開關(guān)功能的各種場合,。
2 修正方法
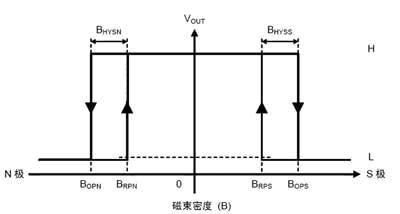
圖2 S-5711A工作特性
S-5711ANDL-I4T1G集成傳感器具有高靈敏度,工作溫度范圍寬(-40~+85℃)等特點(diǎn),。通常,,霍爾電壓VOUT與磁感應(yīng)強(qiáng)度B為非線性關(guān)系,其絕對線性度為29%,。且存在不平衡電壓UHe,,如果使用不當(dāng),必定會影響檢測系統(tǒng)的精度,。S-5711ANDL-I4T1G芯片內(nèi)部電路原理如圖3所示,。
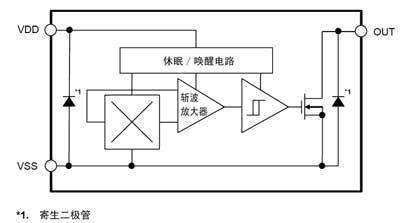
圖3 S-5711ANDL-I4T1G芯片內(nèi)部電路原理
其輸出電壓由下式所確定:
UH=KHIHBcosθ+KeIH
式中KH——霍爾靈敏度
IH——霍爾傳感器驅(qū)動電流;
B——磁感應(yīng)強(qiáng)度,;
Cosθ——元件平面法線與B的夾角,;
Ke———不平衡系數(shù)。
KeIH=UHe稱為不平衡電壓,,(UHe/UH))×100%稱為不平衡率,,設(shè)其為Re。一般霍爾元件的Re為±10%左右,。KH和由被檢電流產(chǎn)生的B均為非線性因素,。消除不平衡電壓和改善的非線性度的電路如圖4所示,。
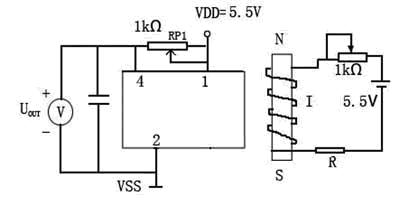
圖4 消除不平衡電壓和改善的非線性度的電路
圖4中的電流I相當(dāng)于被檢測電流,芯片3腳不用,。改變電流I就是改變了磁感應(yīng)強(qiáng)度B,。測試曲線如圖5所示。

圖5中:曲線1:R14=0,;曲線2:R14→∞,;曲線3:R14=100Ω。直線4稱為理論線性度擬合曲線,,是原點(diǎn)(0,,0)和限量點(diǎn)Q(3.8,2.4)的連線,。曲線1沒有加校正電位計(jì)RP1,,這時不平衡電壓UHe=0.3V,不平衡率為Re=(UHe/UH)×100%=(0.3/2.4)×100%=12.5%,。
對線性度進(jìn)行分析如下,。
對線性度進(jìn)行分析如下,。
線性度是測量系統(tǒng)靜態(tài)特性對選定擬合直線y=b+kx的接近程度。
δL=(|Δm|/Ym)×100%
式中Δm——靜態(tài)特性與選定擬合直線的最大擬合偏差,;
Ym——y的限量值,。
確定擬合直線的方法不同,δL也不同,。本文采用絕對線性度方法,,這種方法得到的值一般比最小二乘法線性度的要大。
對于圖5中曲線1:|Δm1|=0.7V,,限量值Ym=UHm=2.4V,,由式δL=(|Δm|/Ym)×100%可知線性度δL1=29%,即對霍爾傳感器不加校正電路時,,絕對線性度為29%,,比較大。電路經(jīng)過校正后,,最佳工作狀態(tài)為圖5中曲線3,,有|Δm3|=0.13V,同理δL3=7.6%,,可見線性度得到很大的改善,。圖5中曲線2(R14→∞):消除了不平衡電壓,又獲得了良好的線性度,。但同時在同樣磁感應(yīng)強(qiáng)度下即同強(qiáng)度被檢測電流情況下,,輸出電壓下降,即傳感器靈敏度下降,,但這個不足可由后級放大器來彌補(bǔ),。
結(jié)束語
通過非線性修正,,此設(shè)計(jì)的霍爾電流傳感器具備了較高的精度和良好的線性度,實(shí)用性強(qiáng),。通過實(shí)驗(yàn)和理論分析,,文中設(shè)計(jì)的電路能找出霍爾傳感器的最佳線性工作狀態(tài),并消除不平衡電壓,。
此內(nèi)容為AET網(wǎng)站原創(chuàng),,未經(jīng)授權(quán)禁止轉(zhuǎn)載。