
前言
目前,系統(tǒng)中的開關(guān)電源具有兩種不同的工作模式,當(dāng)電源處于導(dǎo)通狀態(tài)的時候,可以用不同的模式來描述環(huán)繞在電源扼流圈中的電流。本文以FLYBACK拓?fù)浣Y(jié)構(gòu)為例,按照其工作原理,可能工作在兩種不同的模式,但這兩種模式具有相同的功率容量,則對應(yīng)這兩種不同的導(dǎo)通模式,在直流和交流情況下會有非常大的差別,而且組成電源的元器件會受不同程度的影響。根據(jù)眾多實驗結(jié)果的分析,可以看出眾多的離線式電源系統(tǒng),為了提高系統(tǒng)的可靠性,降低對元器件等級的要求,一般都工作在非連續(xù)區(qū)域。
本文將首先介紹臨界模式控制原理,在分析兩種模式工作特點的基礎(chǔ)上,提出臨界模式控制的概念,并通過不同模式零、極點的分析,得出針對FLYBACK結(jié)構(gòu)調(diào)整臨界模式的方案,提出整體電路系統(tǒng)設(shè)計,并給出模擬仿真結(jié)果。
臨界模式控制原理
圖1(a)和(b)示出幾個周期內(nèi)轉(zhuǎn)換器線圈中流過電流的波形示意圖,從圖中可以看出,當(dāng)處于導(dǎo)通狀態(tài)的時候,在電感中建立起來磁場,電流快速上升;而當(dāng)關(guān)斷后,電感磁場快速下降,根據(jù)洛侖茲定律,在電感中建立起反向電動勢,在這種情況下,電流為了保持其電流連續(xù)性,必須找到其相應(yīng)通路,并且電流開始減小,例如,在拓?fù)浣Y(jié)構(gòu)為FLYBACK的情況下,可以通過輸出網(wǎng)絡(luò)維持其電流,而在BUCK拓?fù)浣Y(jié)構(gòu)下,則通過續(xù)流二極管維持其電流。
如果在電流下降的周期內(nèi),在電流減至零之前,電路再次導(dǎo)通的話,如圖1(a)所示,稱為“連續(xù)導(dǎo)通模式”(CCM)。而如果當(dāng)關(guān)斷時期內(nèi),由于線圈儲能比較有限,導(dǎo)致再次開通之前電流已經(jīng)降為零,如圖1(b)所示,出現(xiàn)了一段“死區(qū)時間”,則對應(yīng)的工作狀態(tài)稱為“非連續(xù)導(dǎo)通模式”(DCM)。死區(qū)時間有長有短,而如果將電路設(shè)置成這樣的工作狀態(tài),就是當(dāng)在關(guān)斷期間,電流一降到零,系統(tǒng)立即開啟,則對應(yīng)的死區(qū)時間為零,對應(yīng)的這種工作狀態(tài)稱為“臨界導(dǎo)通模式”。
|
|
|
(a)連續(xù)導(dǎo)通模式(CCM)電流波形示意圖 |

目前總共有三種方法使電路進入臨界狀態(tài):
確定出臨界狀態(tài)對應(yīng)的電感值LC,但是當(dāng)電感值LC確定后,在不同負(fù)載情況下,系統(tǒng)卻可能進入CCM模式,也可能進入DCM模式;
已知的某一個給定電感L情況下,通過確定負(fù)載的大小,使電路進入不同的模式;
將上述的電感和電阻等關(guān)鍵元器件的值都固定下來,通過開關(guān)頻率的調(diào)整,使電路進入臨界模式。
臨界模式控制器的設(shè)計
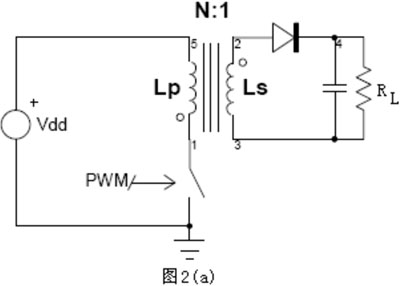
圖2所示FLYBACK拓?fù)浣Y(jié)構(gòu)的轉(zhuǎn)換器,通過對它的計算分析來進行進一步的解釋。
|
|
|
(a) FLYBACK拓?fù)浣Y(jié)構(gòu)電路示意圖 |
|
|
|
(b) 次級線圈對應(yīng)電壓波形示意圖 |

為了簡化分析,先進行如下假設(shè):
假設(shè)1:每周期內(nèi)電感平均電壓降為0;
假設(shè)2:根據(jù)圖1(b)所示,當(dāng)L=LC的時候,IL(平均)=1/2IP
假設(shè)3:電源功率具有100%的轉(zhuǎn)換效率,即Pin=Pout
采用上面假設(shè)1,可以確定出在CCM模式下的直流電壓轉(zhuǎn)換率,根據(jù)圖2(b)可以得到下列關(guān)系式:

根據(jù)圖1(b)可以看出,對應(yīng)于臨界模式,意味著在導(dǎo)通狀態(tài)中,對線圈中存儲的能量會在下個周期開始的時候正好降為零,根據(jù)此判斷,可得:
![]()
根據(jù)假設(shè)2,對上式積分可得:

通過聯(lián)立上述方程,可確定出對應(yīng)臨界狀態(tài)的關(guān)鍵元器件的大小:
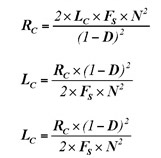
以上確定了FLYBACK拓?fù)浣Y(jié)構(gòu)轉(zhuǎn)換器臨界模式對應(yīng)的關(guān)鍵參數(shù)值,也可以確定出,在保證電源穩(wěn)定和可靠的前提下,DCM模式和CCM模式對應(yīng)的極點和零點也能夠確定出來。表1給出了不同操作模式下極點和零點的位置及對應(yīng)的FLYBACK電壓增益。
|
表1 FLYBACK拓?fù)洳煌J綄?yīng)極點、零點及電壓增益 |
|
|

表1中FSW為開關(guān)頻率,VSAW對應(yīng)PWM控制信號鋸齒波的幅度,LP為初級線圈電感。
根據(jù)表1,采用功率分析軟件Power 4-5-6進行模擬,對于100kHz頻率、電壓模式PWM控制器進行模擬分析,所得結(jié)果如圖3所示,其中圖3(a)所示為DCM模式下的高頻極點,圖3(b)所示為CCM模式下的高頻極點模擬結(jié)果。
|
|
|
(a) CCM模式下的模擬結(jié)果; |
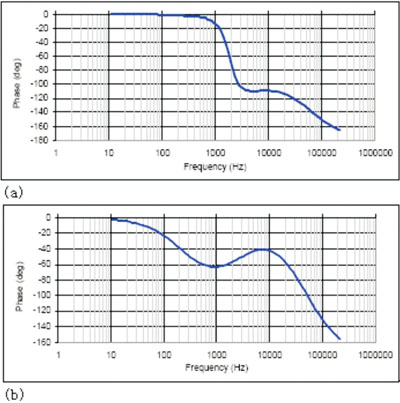
從圖3可以看出,DCM模式下,需要雙極點單零點的補償網(wǎng)絡(luò),而CCM模式則需要雙極點雙零點的補償網(wǎng)絡(luò),當(dāng)在DCM模式下的極點和零點固定的情況下,CCM的二級極點將會對應(yīng)于控制信號的占空比而發(fā)生變化。