
1 引言
直流穩(wěn)壓電源已廣泛地應(yīng)用于許多工業(yè)領(lǐng)域中,。在工業(yè)生產(chǎn)中(如電焊,、電鍍或直流電機(jī)的調(diào)速等),需要用到大量的電壓可調(diào)的直流電源,,他們一般都要求有可以方便的調(diào)節(jié)電壓輸出的直流供電電源,。目前,由于開關(guān)電源[1]效率高,,小型化等優(yōu)點(diǎn),,傳統(tǒng)的線性穩(wěn)壓電源,、晶閘管穩(wěn)壓電源逐步被直流開關(guān)穩(wěn)壓電源所取代。開關(guān)電源主要的控制方式是采用脈寬調(diào)制集成電路輸出PWM 脈沖,,采用模擬PID調(diào)節(jié)器進(jìn)行脈寬調(diào)制,,這種控制方式,存在一定的誤差,,而且電路比較復(fù)雜[2],。本文設(shè)計(jì)了一種以ST 公司的高性能單片機(jī)μpsd3354 為控制核心的輸出電壓大范圍連續(xù)可調(diào)的功率開關(guān)電源,由單片機(jī)直接產(chǎn)生PWM 波,,對(duì)開關(guān)電源的主電路執(zhí)行數(shù)字控制,,電路簡(jiǎn)單,功能強(qiáng)大[3],。
2 功率直流電源系統(tǒng)原理與整體設(shè)計(jì)
2.1 系統(tǒng)原理
本功率直流電源系統(tǒng)由開關(guān)電源的主電路和控制電路兩部分組成,,主電路主要處理電能,控制電路主要處理電信號(hào),,采用負(fù)反饋構(gòu)成一個(gè)自動(dòng)控制系統(tǒng),。開關(guān)電源采用PWM 控制方式,通過給定量和反饋量的比較得到偏差,,并通過數(shù)字PID 調(diào)節(jié)器控制PWM 輸出,,從而控制開關(guān)電源的輸出。其中,,PID調(diào)節(jié)和PWM 輸出都由單片機(jī)系統(tǒng)采用軟件控制,。
2.2 系統(tǒng)整體設(shè)計(jì)
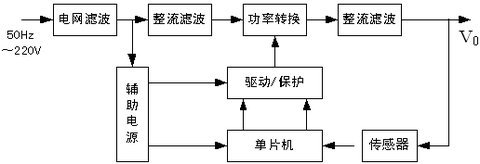
系統(tǒng)硬件部分由輸入輸出整流濾波電路、功率變換部分,、驅(qū)動(dòng)電路,、單片機(jī)系統(tǒng)和輔助電路等幾部分組成。圖1為單片機(jī)控制功率直流電源結(jié)構(gòu)框圖,。
 |
|
圖1 單片機(jī)控制功率電源結(jié)構(gòu)框圖 |
從圖1中可以看到,,50Hz、220V的交流電經(jīng)電網(wǎng)濾波器消除來自電網(wǎng)的干擾,,然后進(jìn)入到輸入整流濾波器進(jìn)行整流濾波,變換成直流電壓信號(hào),。該直流信號(hào)通過功率變換電路轉(zhuǎn)化成高頻交流信號(hào),,高頻交流信號(hào)再經(jīng)輸出整流濾波電路轉(zhuǎn)化成直流電壓輸出[1]??刂齐娐凡捎肞WM脈寬調(diào)制方式,,由單片機(jī)產(chǎn)生的脈寬可調(diào)的PWM控制信號(hào)經(jīng)驅(qū)動(dòng)電路處理后,驅(qū)動(dòng)功率變換電路工作,。利用單片機(jī)高速ADC轉(zhuǎn)換通道定時(shí)采集輸出電壓,,并與期望值比較,,根據(jù)其誤差進(jìn)行PID調(diào)節(jié)。電壓采集電路實(shí)現(xiàn)了直流電壓V0的采集,,并使其與A/D轉(zhuǎn)換器的模擬輸入電壓范圍匹配,,在開關(guān)電源發(fā)生過壓、過流和短路故障時(shí),,保護(hù)電路對(duì)電源和負(fù)載起保護(hù)作用,。輔助電源為控制電路、驅(qū)動(dòng)電路等提供直流電源,。
3. 開關(guān)電源主電路設(shè)計(jì)
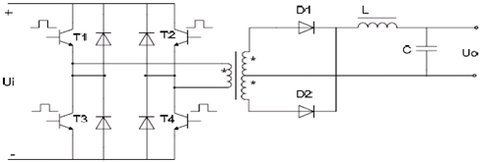
開關(guān)電源主電路是用來完成DC-AC-DC 的轉(zhuǎn)換,,系統(tǒng)主電路采用全橋型DC-DC 變換器,如圖2 所示,。本系統(tǒng)采用的功率開關(guān)器件是EUPEC 公司的BSM 50GB120DN2 系列的IGBT 模塊,,每個(gè)模塊是一個(gè)半橋結(jié)構(gòu),故在全橋系統(tǒng)中,,需要兩個(gè)模塊,。每個(gè)模塊內(nèi)嵌入一個(gè)快速續(xù)流二極管。
 |
|
圖2 功率直流電源主電路圖 |
4. 控制電路硬件設(shè)計(jì)
4.1 控制電路結(jié)構(gòu)框圖
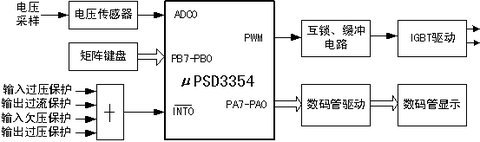
功率直流電源的控制電路采用ST 公司的μpsd3354 單片機(jī)為核心,??刂齐娐分饕瓿扇缦鹿δ埽弘妷翰杉/D 轉(zhuǎn)換,、閉環(huán)調(diào)節(jié),、PWM 信號(hào)產(chǎn)生,IGBT 驅(qū)動(dòng)與保護(hù),、鍵盤輸入和輸出電壓顯示等功能,。控制電路主要包括:?jiǎn)纹瑱C(jī)系統(tǒng),、電壓采集電路,、IGBT驅(qū)動(dòng)電路和鍵盤、顯示電路等,。結(jié)構(gòu)框圖如圖3 所示,。系統(tǒng)通過PWM 輸出控制功率轉(zhuǎn)換開關(guān)的導(dǎo)通與關(guān)斷時(shí)間,完成對(duì)輸出電壓的穩(wěn)定控制,,通過A/ D 轉(zhuǎn)換完成對(duì)開關(guān)電源輸出電壓的采樣,,同時(shí)采用電壓閉環(huán)控制,開關(guān)電源工作時(shí),,根據(jù)期望值與電壓反饋值的偏差,,由單片機(jī)實(shí)現(xiàn)對(duì)PWM 占空比進(jìn)行PID 調(diào)節(jié)。
 |
|
圖3 控制電路結(jié)構(gòu)圖 |
4.2 IGBT 驅(qū)動(dòng)電路設(shè)計(jì)
為了精確控制開關(guān)電路的電壓輸出,本系統(tǒng)采用脈寬調(diào)制方式調(diào)節(jié)開關(guān)管的工作狀態(tài),。根據(jù)電壓控制算法(可采用改進(jìn)的PID 控制算法)設(shè)置單片機(jī)產(chǎn)生不同占空比的方波信號(hào),,經(jīng)過光電耦合器控制開關(guān)器件,調(diào)整電路輸出設(shè)定的電壓值,。要使IGBT 正常工作,,合適的驅(qū)動(dòng)是至關(guān)重要的。驅(qū)動(dòng)電路的任務(wù)是將控制電路發(fā)出的信號(hào)轉(zhuǎn)換為加在電力電子器件控制端和公共端之間,、可以使其開通或關(guān)斷的信號(hào),。同時(shí)驅(qū)動(dòng)電路通常還具有電氣隔離及電力電子器件的保護(hù)等功能。本系統(tǒng)采用富士電機(jī)公司的EXB系列的EXB841 型集成驅(qū)動(dòng)器對(duì)IGBT 進(jìn)行驅(qū)動(dòng)[4],。
4.3 傳感器輸入通道與A/D 轉(zhuǎn)換
系統(tǒng)通過電壓傳感器采集電壓信號(hào),,經(jīng)過A/D 轉(zhuǎn)換被單片機(jī)接收。本系統(tǒng)采用CHV 系列霍爾電壓傳感器采集電壓,,采用μpsd3354 單片機(jī)內(nèi)部的A/D轉(zhuǎn)換器進(jìn)行模數(shù)轉(zhuǎn)換,,線路連接簡(jiǎn)單,精度最大為5mV,?;灸軡M足控制要求。
4.4 鍵盤和顯示電路
功率直流電源的鍵盤和顯示電路部分都裝在操作面板上,,由單片機(jī)控制,。本系統(tǒng)采用自制4×4 矩陣鍵盤,以單片機(jī)的PB4~PB7 做輸出線,,PB0~PB3 做輸入線,。顯示部分采用動(dòng)態(tài)數(shù)碼顯示,以專用的數(shù)碼管顯示驅(qū)動(dòng)芯片MAX7219進(jìn)行驅(qū)動(dòng),。
4.5 其他輔助電路
為了使功率直流電源能夠可靠,、安全的工作。電源系統(tǒng)中還有一些輔助電路,,過熱,、過流和短路保護(hù)等。另外,,還設(shè)有輔助電源部分,,提供系統(tǒng)所需電源。
5. 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)軟件主要由主程序和中斷服務(wù)程序組成,,主要用來實(shí)現(xiàn)以下功能:鍵盤掃描,、數(shù)碼顯示、A/D 轉(zhuǎn)換,、數(shù)字PID 調(diào)節(jié)和PWM 波形產(chǎn)生等。鍵盤掃描和數(shù)碼顯示這里不作介紹,本設(shè)計(jì)主要是采用軟件方式來實(shí)現(xiàn)功率直流電源的數(shù)字控制,。
5.1 主程序設(shè)計(jì)
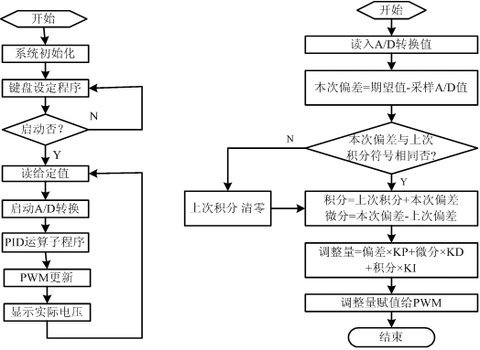
本系統(tǒng)主程序流程圖如圖4所示,。主流程在完成各種變量和I/O初始化后,可以輸入期望電壓值并存入寄存器,,當(dāng)按下啟動(dòng)按鈕后,,啟動(dòng)電源系統(tǒng),這里設(shè)定啟動(dòng)時(shí),,使PWM輸出占空比為最小值,,即0.1%。啟動(dòng)后,,調(diào)用A/D轉(zhuǎn)換子程序并讀入鍵值,,將反饋電壓值與給定電壓值相比較后,調(diào)用PID調(diào)節(jié)運(yùn)算,,更新驅(qū)動(dòng)波形的占空比,,然后調(diào)用PWM產(chǎn)生子程序輸出PWM信號(hào),并通過顯示子程序顯示輸出電壓,。
 |
|
圖4 主程序流程圖 圖5 PID調(diào)節(jié)子程序流程圖 |
5.2 A/D轉(zhuǎn)換部分子程序
直接利用單片機(jī)10位ADC口,,A/D轉(zhuǎn)換部分程序比較簡(jiǎn)單,程序只要完成如下功能:選擇模擬輸入通道,,并預(yù)制分頻數(shù),;配置控制寄存器ACON;讀取A/D轉(zhuǎn)換后的數(shù)值,,返還ADTA0,、ADTA1中的數(shù)據(jù)。
5.3 PID調(diào)節(jié)子程序
PID調(diào)節(jié)由單片機(jī)來實(shí)現(xiàn),,單片機(jī)對(duì)給定信號(hào)與反饋信號(hào)相減得到的誤差來計(jì)算調(diào)整量,,用以控制開關(guān)的占空比。算法中,,做了一點(diǎn)修正,,當(dāng)偏差與積分符號(hào)相反時(shí),積分清零,。因?yàn)槿舴?hào)相反,,說明積分項(xiàng)起了反作用,故把積分項(xiàng)清零[5],。PID控制流程圖如圖5所示,,參數(shù)KP、KI,、KD在調(diào)試過程中設(shè)定,。
6. 結(jié)束語
本系統(tǒng)將開關(guān)電源與單片機(jī)系統(tǒng)結(jié)合起來,,設(shè)計(jì)了一種輸出電壓連續(xù)可調(diào)的功率開關(guān)電源。該電源精度高,,電路簡(jiǎn)單,,操作靈活,具有良好的應(yīng)用前景,。單片機(jī)控制直流電源符合電力電子新技術(shù)產(chǎn)品向“四化”方向發(fā)展的要求,,即應(yīng)用技術(shù)的高頻化、硬件結(jié)構(gòu)的模塊化,、軟件控制的數(shù)字化,、產(chǎn)品性能的綠色化。