
超聲波測(cè)距具有迅速、方便、且計(jì)算簡(jiǎn)單,測(cè)量精度高等諸多特點(diǎn),因此在倒車?yán)走_(dá)、測(cè)距儀、移動(dòng)機(jī)器人和農(nóng)產(chǎn)品無(wú)損檢測(cè)等廣泛應(yīng)用。聲納(Sonar)是聲音導(dǎo)航測(cè)距(Sound Navigation and Ranging),廣泛用于對(duì)水下目標(biāo)進(jìn)行探測(cè)、定位、跟蹤、通信和導(dǎo)航等。在此,介紹采用SensComp公司600系列高靈敏聲納傳感器和SliconLabrary公司單片機(jī)C8051F040設(shè)計(jì)測(cè)量系統(tǒng)。該系統(tǒng)設(shè)置有鍵盤和LCD人機(jī)操作界面,可提供RS 232和控制器局域網(wǎng)(CAN)兩種總線輸出,方便實(shí)際應(yīng)用。
1 聲納傳感器及測(cè)距原理
SensComp 600系列聲納傳感器實(shí)物照片如圖1所示,它整合了6500測(cè)距模塊和600系列超聲波探頭,探頭中心頻率50 kHz,具有極好的接收靈敏度。觸發(fā)方式可選內(nèi)部觸發(fā)(觸發(fā)頻率5 Hz)或外部觸發(fā),I/O接口均兼容TTL邏輯電平,正常工作電壓范圍為6~24 VDC。與其他超聲波傳感器相比,其聲波強(qiáng)度的中部明顯大于旁瓣的強(qiáng)度,波束角度15°。
超聲波測(cè)距的原理是測(cè)出聲波從發(fā)射點(diǎn)至目標(biāo)物體往返傳輸所需的時(shí)間,在一定環(huán)境下聲波的傳輸速率是不變的。根據(jù)式(1)的超聲波測(cè)距數(shù)學(xué)式可測(cè)算得到距離。
式(1)中:D為聲波發(fā)射點(diǎn)與目標(biāo)物體的距離,(單位為m);t為聲波往返發(fā)射點(diǎn)和目標(biāo)物體的時(shí)間。式(2)中:c0為聲波,在0℃時(shí),空氣中的傳播速度為331.4 m/s;T為絕對(duì)溫度。
SensComp 600系列聲納傳感器有兩個(gè)基本的操作模式:?jiǎn)位夭J胶投嗷夭J健T趩位夭J较隆]斎胍_INIT電平跳變?yōu)楦唠娖綍r(shí)傳感器觸發(fā)發(fā)送超聲波,然后等待發(fā)送的聲波信號(hào)返回,最后返回的信號(hào)被放大,并且在輸出引腳ECHO輸出高電平。從引腳INIT變?yōu)楦唠娖降紼CHO跳變?yōu)楦唠娖降臅r(shí)間即為聲波從傳感器至障礙物往返所用的時(shí)間。若要重復(fù)測(cè)量只需按上述循環(huán)操作。多回波模式即一次觸發(fā)多次接收返回的聲波信號(hào)。在此模式下,當(dāng)收到返回信號(hào)后,將輸入引腳BLNK輸入持續(xù)長(zhǎng)于0.44 ms的高電平即可將引腳ECHO變?yōu)榈碗娖剑邮盏较乱淮位夭ㄐ盘?hào)時(shí)ECHO又將輸出高電平。SensComp 600系列超聲波傳感器應(yīng)用于測(cè)距時(shí)采用單回波模式就能滿足要求。
2 系統(tǒng)硬件設(shè)計(jì)
該測(cè)量系統(tǒng)采用美國(guó)SliconLabrary公司單片機(jī)C8051F040作中央處理器。C8051Fxxx系列單片機(jī)是完全集成的混合信號(hào)系統(tǒng)級(jí)芯片,具有與8051兼容的微控制器內(nèi)核,可與MCS-51指令集完全兼容。除了具有標(biāo)準(zhǔn)8052的數(shù)字外設(shè)部件之外,片內(nèi)還集成了數(shù)據(jù)采集和控制系統(tǒng)中常用的模擬部件和其他數(shù)字外設(shè)及功能部件。C8051F040采用高速、流水線結(jié)構(gòu)CIP-51內(nèi)核(可達(dá)25 MIPS),可以使用標(biāo)準(zhǔn)803x/805x的匯編器和編譯器進(jìn)行軟件開(kāi)發(fā),具有強(qiáng)大的功能。如100 kS/s的12位ADC、控制器局域網(wǎng)控制器(CAN),6個(gè)捕捉/比較模塊的可編程計(jì)數(shù)器/定時(shí)器陣列、溫度傳感器、可實(shí)現(xiàn)硬件的SPI,SMBus/I2C和兩個(gè)UART串行接口、64 KB可在系統(tǒng)編程的FLASH存儲(chǔ)器等。其片內(nèi)JTAG調(diào)試電路允許使用安裝在最終應(yīng)用系統(tǒng)上的產(chǎn)品MCU進(jìn)行非侵入式(不占用片內(nèi)資源)、全速、在系統(tǒng)調(diào)試,該調(diào)試系統(tǒng)支持觀察和修改存儲(chǔ)器和寄存器,支持?jǐn)帱c(diǎn)、觀察點(diǎn)、單步及運(yùn)行和停機(jī)命令。在使用JTAG調(diào)試時(shí),所有的模擬和數(shù)字外設(shè)都可全功能運(yùn)行。因此選用此單片機(jī)完全能滿足設(shè)計(jì)要求。設(shè)計(jì)中運(yùn)用C8051F040的定時(shí)器捕捉功能檢測(cè)聲波傳輸時(shí)間,ADC采集片內(nèi)溫度傳感器對(duì)聲速校正,并有鍵盤和LCD人機(jī)作操作界面,F(xiàn)LASH存儲(chǔ)相關(guān)設(shè)置,同時(shí)測(cè)量數(shù)據(jù)通過(guò)RS 232和控制器局域網(wǎng)(CAN)兩種總線輸出。硬件結(jié)構(gòu)圖如圖2所示。C8051F040具有6個(gè)定時(shí)器捕捉模塊,此硬件設(shè)計(jì)還能擴(kuò)展至少5個(gè)超聲波傳感器,以實(shí)現(xiàn)更多功能。

3 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)的軟件由主程序、定時(shí)器2中斷程序以及PCA捕捉中斷程序組成。主程序主要完成系統(tǒng)的初始化,并從FLASH讀入以前的設(shè)置參數(shù)。圖3(a)為定時(shí)器2中斷程序流程圖和PCA捕捉中斷程序流程圖。定時(shí)器2中斷頻率為10 Hz,中斷中讀取按鍵值、CAN總線輸入值和串口UART0輸入值,若這些值與之前的設(shè)置不同,則將寫(xiě)入FLASH中保存。之后程序根據(jù)當(dāng)前的超聲波傳輸時(shí)間和環(huán)境溫度計(jì)算出此次測(cè)量距離,并發(fā)送至CAN總線和UART0,且在LCD上顯示。PCA捕捉中斷程序,流程圖如圖3(b)所示,主要任務(wù)是完成超聲波傳輸時(shí)間檢測(cè),PCA設(shè)置為上升沿捕捉模式。在超聲波傳感器引腳INIT上升沿起,PCA開(kāi)始計(jì)時(shí),當(dāng)PCA的引腳跳變?yōu)楦唠娖綍r(shí),即傳感器ECHO變?yōu)楦唠娖綍r(shí)計(jì)時(shí)結(jié)束。若超過(guò)一定時(shí)間仍未收到回波,則放棄本次測(cè)量,重新觸發(fā)下次測(cè)量。

4 系統(tǒng)調(diào)試及精度測(cè)量試驗(yàn)
4.1 系統(tǒng)調(diào)試
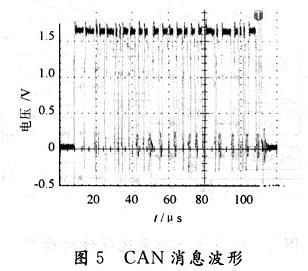
調(diào)試采用Tektronix Tds3034B四通道彩色數(shù)字示波器中的兩個(gè)通道,檢測(cè)出傳感器INIT和ECHO兩引腳波形跳變,如圖4所示。可由兩電平跳變之間的時(shí)間與單片機(jī)檢測(cè)時(shí)間對(duì)比,檢查捕捉計(jì)時(shí)程序是否準(zhǔn)確。系統(tǒng)所測(cè)數(shù)據(jù)由CAN總線發(fā)出,調(diào)試時(shí)通過(guò)USB轉(zhuǎn)CAN接口在電腦上接收到的數(shù)據(jù),示波器檢測(cè)到CAN總線上波形,如圖5所示。

4.2 測(cè)量精度試驗(yàn)
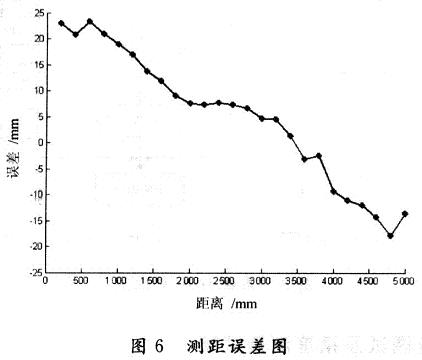
為標(biāo)定系統(tǒng)測(cè)量精度,用200 cm×100 cm×2 cm硬平木板作障礙物進(jìn)行測(cè)量,并用鋼卷尺測(cè)量實(shí)際距離。系統(tǒng)測(cè)量量程為15~1 070 cm。在45~500 cm范圍內(nèi)進(jìn)行了誤差分析試驗(yàn),其結(jié)果如圖6所示。由此可得測(cè)量系統(tǒng)的最大誤差為2.34 cm,平均誤差為0.49 cm。
5 結(jié) 語(yǔ)
在此,采用SensComp 600聲納傳感器和單片機(jī)C8051F040設(shè)計(jì)實(shí)現(xiàn)了聲納測(cè)距,系統(tǒng)所需硬件少,測(cè)量量程為15~1 070 cm。在45~500 cm范圍內(nèi),最大誤差為2.34 cm。系統(tǒng)除用于測(cè)距外,還可用于障礙物檢測(cè)、傾斜角度測(cè)量、車輛定位與導(dǎo)航和液位測(cè)量、農(nóng)業(yè)物料檢測(cè)等領(lǐng)域應(yīng)用。 不足之處是單片機(jī)C8051F040功能非常多,但在此系統(tǒng)中未充分應(yīng)用,因此還能利用C8051F040設(shè)計(jì)更多的功能,來(lái)以擴(kuò)充該系統(tǒng);此外,該系統(tǒng)的測(cè)量誤差相對(duì)較大,可以在程序中進(jìn)行誤差補(bǔ)償?shù)忍幚恚瓜到y(tǒng)測(cè)量精度更高。