
摘 要: 介紹了以MC68HC908JB8為主控芯片的Freescale 16位MCU MC68HC912B32的BDM調(diào)試模式,給出了BDM通信協(xié)議及編程原理、硬件電路圖。
關(guān)鍵詞: BDM MC68HC912B32 BKGD
隨著Flash技術(shù)在微處理器上的廣泛應(yīng)用,使單片機(jī)在開發(fā)和應(yīng)用手段上有了革命性的變化,從傳統(tǒng)的仿真器(ICE)到目前流行的JTAG,設(shè)計(jì)人員在不斷尋找一種移植性更高、更易操作、費(fèi)用更低的開發(fā)手段。使用傳統(tǒng)的仿真器進(jìn)行嵌入式開發(fā)時(shí),通常調(diào)試工具會受價(jià)格和煩瑣的操作所限制,但是隨著微處理器制造工藝的提高及Flash技術(shù)的發(fā)展,一些高端微處理器(如CPU12/16/32、PowerPC、ColdFire等)內(nèi)部已經(jīng)包含了用于調(diào)試的微代碼,并可以通過背景調(diào)試模式BDM(Background Debug Mode)進(jìn)行調(diào)試。由于這種方法省去了仿真器,因此避免了高頻操作、交直流電不匹配等問題。隨著BDM標(biāo)準(zhǔn)的不斷規(guī)范和普及,用BDM調(diào)試模式進(jìn)行嵌入式開發(fā)已經(jīng)成為一種首選。
MC68HC912B32(以下簡稱B32)是由Freescale公司推出的一款基于CPU12核心的16位嵌入式MCU。它具有體積小、功耗小、功能多等優(yōu)點(diǎn),主要用于汽車電子、工業(yè)控制、醫(yī)療設(shè)備等領(lǐng)域。它是Freescale公司較早提供的一款背景調(diào)試模式的16位MCU。背景調(diào)試模式是Freescale公司自定義的片上調(diào)試規(guī)范。
1 背景調(diào)試模式介紹
BDM是由Freescale半導(dǎo)體公司推出的一種單線(Single Wire)調(diào)試方式,是目前單片機(jī)普遍采用的調(diào)試方式之一。其他公司的嵌入式處理器也有類似的調(diào)試方式,如AMD公司的X86μP系列微處理器提供的AMDebug調(diào)試方式等。
BDM調(diào)試方式為開發(fā)人員提供了底層的調(diào)試手段,開發(fā)人員可以通過它初次向目標(biāo)板下載程序,同時(shí)也可以通過BDM調(diào)試器" title="調(diào)試器">調(diào)試器對目標(biāo)板MCU的Flash進(jìn)行寫入、擦除等操作。用戶也可以通過它進(jìn)行應(yīng)用程序的下載和在線更新、在線動(dòng)態(tài)調(diào)試和編程、讀取CPU各個(gè)寄存器的內(nèi)容、單片機(jī)內(nèi)部資源的配置與修復(fù)、程序的加密處理等操作。而這些僅需要向CPU發(fā)送幾個(gè)簡單的指令就可以實(shí)現(xiàn),從而使調(diào)試軟件的編寫變得非常簡單,通常自己就可以編寫。BDM硬件調(diào)試插頭的設(shè)計(jì)也非常簡單,關(guān)鍵是要滿足通信時(shí)序關(guān)系和電平轉(zhuǎn)換要求。
目前常用的標(biāo)準(zhǔn)BDM調(diào)試插頭如圖1所示,各個(gè)引腳信號的定義如表1所示。
?

2 BDM調(diào)試原理
2.1 總體概述
以CPU12為內(nèi)核的MCU的運(yùn)行模式有單片方式(Single chip)和擴(kuò)展方式(Expanded Mode)兩種。運(yùn)行模式主要由BKGD、MODB和MODA引腳的狀態(tài)決定,各個(gè)模式與引腳狀態(tài)間的關(guān)系見表2。單片模式又分普通單片模式(Normal Single Chip)和特殊單片模式(Special Single Chip)兩種,而只有在特殊模式下BDM才能被激活,因此特殊單片模式又稱BDM模式。圖2為PC機(jī)通過BDM插頭與目標(biāo)機(jī)相連。
?

2.2 BDM指令介紹
BDM有兩類指令。一類是在一般運(yùn)行模式下可以直接執(zhí)行的,被稱為硬件指令(Hardware Command);另一類則是只能在BDM模式下執(zhí)行的程序,這些程序在進(jìn)入BDM模式后被固化在地址為$FF00~$FFFF的ROM中,被稱為固件" title="固件">固件指令(Firmware Command)。
因?yàn)锽DM控制模塊不在CPU中,所以BDM硬件指令可以在CPU正常運(yùn)行時(shí)被并行執(zhí)行,其他BDM指令是基于固件的,必須在CPU處于BDM模式下才能執(zhí)行。硬件指令允許讀寫目標(biāo)系統(tǒng)內(nèi)(包括片內(nèi)RAM、EEPROM、I/O和控制寄存器等)的所有內(nèi)存。硬件指令可以不在BDM模式下執(zhí)行,表3列出了BDM模塊常用的硬件指令。
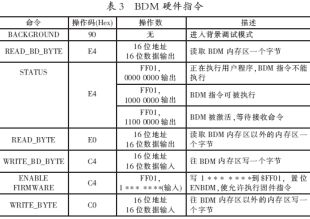
固件指令必須在HC12單片機(jī)的BDM ROM中執(zhí)行,且CPU必須在BDM模式下才能執(zhí)行,通常使用硬件指令BACKGROUND使CPU進(jìn)入BDM模式。當(dāng)BDM被激活時(shí),BDM ROM就被分配到地址空間:$FF20~$FFFF,同時(shí)7個(gè)BDM寄存器被分配到地址空間:$FF00~$FF06,此時(shí)CPU就可以通過執(zhí)行ROM中的代碼完成相應(yīng)的固件指令操作。表4列出了BDM的7個(gè)寄存器,表5介紹了常用的3個(gè)固件指令。
2.3 進(jìn)入BDM模式
下面介紹使目標(biāo)機(jī)進(jìn)入BDM模式的兩種常用方法。
方法1:將目標(biāo)機(jī)的BKGD引腳拉低,然后給目標(biāo)機(jī)的RESET引腳加低電平,即給目標(biāo)機(jī)復(fù)位,復(fù)位脈沖要足夠?qū)挘辽僖笥谀繕?biāo)機(jī)的512個(gè)時(shí)鐘周期" title="時(shí)鐘周期">時(shí)鐘周期。本文采用Freescale公司的8位微處理器MC68HC908JB8(簡稱JB8)制作BDM調(diào)試頭,用其PTA0和PTA1口控制目標(biāo)機(jī)的RESET和BKGD引腳。此方法通過軟件編程的方式進(jìn)入BDM模式。
方法2:通過硬件跳線的方式將BKGD置低電平,在目標(biāo)機(jī)復(fù)位后再將BKGD置高電平" title="高電平">高電平,以進(jìn)入目標(biāo)機(jī)的BDM模式。進(jìn)入BDM模式后,帶有BDM程序的片內(nèi)專用ROM將Flash的$FF00~$FFFF替換。此空間在普通單片方式下存放中斷向量。該方法僅通過硬件跳線的方式進(jìn)入BDM模式。
3 B32的BDM調(diào)試系統(tǒng)設(shè)計(jì)
3.1 BDM調(diào)試器系統(tǒng)硬件設(shè)計(jì)
該BDM調(diào)試器的BKGD和RESET信號分別由JB8單片機(jī)的I/O口PTA1、PTA0提供。雙方通信引腳使用漏極開路驅(qū)動(dòng)(或稱線或)的方式,平時(shí)靠上拉電阻維持高電平。Flash編程電源VFP由MAX662提供,MAX662是一款專門提供12V Flash編程電壓的芯片。MAX662外圍電路原理圖如圖3,BDM調(diào)試插頭電路原理圖如圖4。

3.2 BDM調(diào)試器系統(tǒng)軟件設(shè)計(jì)
CPU12的BDM通信協(xié)議也稱為單線通信協(xié)議。下面按照該協(xié)議,以JB8作為主控制芯片詳細(xì)介紹B32的BDM調(diào)試系統(tǒng)的軟件設(shè)計(jì)。在程序開始前,需要宏定義一些常量以方便下面程序的調(diào)用。具體的宏定義有:
#define DisableInt() asm(″sei″) /*關(guān)閉中斷*/
#define EnableInt() asm(″cli″) /*開放中斷*/
#define PTA *(volatile unsigned char*)0x00
/*A口數(shù)據(jù)寄存器*/
#define DDRA *(volatile unsigned char*)0x04
/*A口方向寄存器*/
3.2.1 調(diào)用讀寫匯編子程序
通過調(diào)用讀寫匯編子程序" title="子程序">子程序,可以讀取和發(fā)送一個(gè)字節(jié),具體函數(shù)如下:
INT8U BDMDATA;
void SendOneByte(INT8U c)
{
DisableInt();//關(guān)中斷
BDMDATA=c;//賦值需要發(fā)送的值
_WRITEBYTE();//調(diào)用寫字節(jié)匯編子程序
EnableInt();//開中斷
}
INT8U RecOneByte()
{
DisableInt();//關(guān)中斷
_READBYTE();//調(diào)用讀取字節(jié)匯編子程序
EnableInt();//開中斷
return BDMDATA;//返回讀取的字節(jié)
}
調(diào)用寫子程序的輸入?yún)?shù)是需要被寫的一個(gè)字節(jié);調(diào)用讀子程序的返回參數(shù)是讀取到的一個(gè)字節(jié)。
3.2.2 讀寫匯編子程序
主機(jī)方以下降沿通知目標(biāo)機(jī)方的BKGD端,位通信開始,每一位傳輸至少需要16個(gè)時(shí)鐘周期。具體過程如下:
主機(jī)首先拉低BKGD引腳,并使低電平維持時(shí)間不短于512個(gè)時(shí)鐘周期,目標(biāo)機(jī)探測到下降沿信號后清命令寄存器,同時(shí)等待接收主機(jī)的BDM命令。
主機(jī)寫位0到目標(biāo)機(jī)BKGD端的操作為:主機(jī)拉低目標(biāo)機(jī)的BKGD端不少于12個(gè)時(shí)鐘周期,目標(biāo)機(jī)在探測到低電平以后的第10個(gè)周期對BKGD采樣,讀入該位的0。
主機(jī)寫位1到目標(biāo)機(jī)BKGD端的操作為:主機(jī)拉低目標(biāo)機(jī)的BKGD端2~4個(gè)時(shí)鐘周期后釋放BKGD端,使之為高電平,目標(biāo)機(jī)在探測到低電平以后的第10個(gè)周期對BKGD采樣,讀入該位的1。
下面是寫一個(gè)字節(jié)的匯編代碼:
__WRITEBYTE∷
LDA #$8
_NEXTBIT:
LSL*_BDMDATA //左移待發(fā)送的8位數(shù)據(jù)
BCC_WRITE0 //判斷發(fā)送位
BCLR #1,PTA //PTA.1置低電平
NOP
BSET #1,DDRA //PTA.1定義為輸出
_NEXTBIT1:
BCLR #1,DDRA //PTA.1定義為輸入
NOP
DBNZA _NEXTBIT //判斷字節(jié)是否發(fā)送完畢
_WAIT10:
RTS //返回主程序
_WRITE0: //發(fā)送位“0”
BCLR #1,PTA //PTA1置低電平
NOP
BSET #1,DDRA //PTA1定義為輸出
NOP //空操作,用于控制時(shí)序
NOP
NOP
NOP
NOP
NOP
NOP
BRA_NEXTBIT1 //發(fā)送下一位
主機(jī)讀目標(biāo)機(jī)BKGD端的信息時(shí),主機(jī)拉低目標(biāo)機(jī)BKGD端2~4個(gè)周期后釋放BKGD端,然后定義該引腳為輸入狀態(tài),讀取BKGD端的電平。如果目標(biāo)機(jī)輸出為0電平,則繼續(xù)拉低BKGD端,從探測到主機(jī)拉低BKGD端起持續(xù)13個(gè)時(shí)鐘周期。所以主機(jī)的讀操作應(yīng)在從拉低BKGD線算起的13個(gè)時(shí)鐘周期內(nèi)完成。對于目標(biāo)機(jī)輸出為1的情況,無需目標(biāo)機(jī)輸出高電平,因?yàn)锽KGD端已用電阻上拉,只需定義該引腳為輸入,則自然會使之為1。
下面是讀取一個(gè)字節(jié)的匯編代碼:
__READBYTE∷
LDA #8
_NEXTBITR:
PSHA //A進(jìn)棧
LDA #01
BCLR #1,PTA //PTA.1置低電平
BSET #1,DDRA //PTA.1定義為輸出
BCLR #1,DDRA //PTA.1定義為輸入
NOP
LDA PTA //讀取BKGD引腳狀態(tài)
NOP
NOP
NOP
LSRA //將讀取位移入標(biāo)志位C
LSRA
ROL *BDMDATA //將讀取的位存入變量
PULA
DECA
BNE _NEXTBITR //判斷字節(jié)是否讀取完畢
RTS //返回主程序
對于硬件命令,命令之間間隔要大于150個(gè)時(shí)鐘周期;對于固件命令,送出讀命令到讀取數(shù)據(jù)之間要延遲32個(gè)時(shí)鐘周期;寫命令后面可緊跟需要寫的數(shù)據(jù),但與下一條命令之間要間隔32個(gè)時(shí)鐘周期。
3.2.3 測試程序
為了測試以上程序的正確性,特用VC6.0編寫了一個(gè)計(jì)算機(jī)端的測試程序。該程序通過串口與JB8通信,以完成對B32 Flash的讀寫和擦除。由于源代碼較長,限于篇幅不在此列出。
參考文獻(xiàn)
1 Freescale.M68HC12B Family Data sheet.Rev.9,2004
2 Freescale.CPU12 Reference Manual.Rev.3,2002
3 Freescale.A Serial Bootloader for Reprogramming the MC68HC912B32 Flash.E2PROM,1997
4 Freescale.MC68HC90908JB8/D.Rev.1.0,2000