
作者:西北工業(yè)大學(xué)機(jī)電學(xué)院 張?chǎng)?杜清珍 楊杰
引言
市場(chǎng)上現(xiàn)有的監(jiān)控設(shè)備也往往不能滿(mǎn)足用戶(hù)的遠(yuǎn)程查詢(xún)要求,而且誤報(bào)率也比較高。基于藍(lán)牙技術(shù)的家庭監(jiān)控報(bào)警系統(tǒng),能夠?qū)崟r(shí)監(jiān)控終端探測(cè)設(shè)備的數(shù)據(jù),并在有突發(fā)事件時(shí)及時(shí)報(bào)警;同時(shí)該系統(tǒng)還能滿(mǎn)足用戶(hù)隨時(shí)通過(guò)控制中心來(lái)統(tǒng)籌管理家居的要求。
系統(tǒng)硬件電路結(jié)構(gòu)
ROK101007藍(lán)牙模塊
ROK 101007是Ericsson公司生產(chǎn)的一種在電子設(shè)備中實(shí)現(xiàn)藍(lán)牙功能的短距離通信模塊。該藍(lán)牙模塊是由基帶控制器、快閃式存儲(chǔ)器、PBA313 01/2無(wú)線(xiàn)電收發(fā)器3個(gè)芯片組成。其同時(shí)支持?jǐn)?shù)據(jù)和語(yǔ)音的傳遞,通過(guò)一個(gè)符合USB2.0規(guī)格的USB接口或一個(gè)UART/PCM接口來(lái)實(shí)現(xiàn)模塊和主機(jī)控制器之間的通信。它的VCC電源典型值為3.3V。POR101 007符合藍(lán)牙1.1規(guī)范要求,支持多操作點(diǎn)工作方式,通過(guò)了FCCETSI認(rèn)可。
S3C4510B微控制器
S3C4510B是基于以太網(wǎng)應(yīng)用系統(tǒng)的高性?xún)r(jià)比16/32位RISC微控制器,內(nèi)含一個(gè)由ARM" target="_blank">ARM公司設(shè)計(jì)的16/32位ARM7TDMI RISC處理器核。該處理器支持ROM/SRAM,LFASH,DRAM和外部I/O以及8/16/32位方式工作,包含有2個(gè)帶緩沖描述符(Buffer Descriptor)的HDLC通道,HDLC有地址搜索模式、工作速率可達(dá)10Mbps。擁有2個(gè)可工作于DMA方式或中斷方式的UART模塊。具有18個(gè)通用可編程I/O接口,這些I/O接口包括4個(gè)外部中斷請(qǐng)求、2個(gè)定時(shí)器溢出外部和DMA請(qǐng)求和應(yīng)答。
系統(tǒng)硬件電路
家庭監(jiān)控報(bào)警系統(tǒng)整體是由兩部分組成,包括終端探測(cè)電路部分和中心監(jiān)控電路部分。系統(tǒng)總體結(jié)構(gòu)框圖如圖1所示。
圖1 系統(tǒng)組成框圖 
結(jié)構(gòu)框圖中前半部分為一個(gè)基于藍(lán)牙模塊的終端探測(cè)單元電路,主要由傳感器、數(shù)模轉(zhuǎn)換模塊、S3C4510B單片機(jī)、報(bào)警電路及ROK101 008藍(lán)牙模塊組成;后半部分為中心控制單元電路,主要由PC機(jī)和藍(lán)牙模塊組成。
在終端探測(cè)單元,藍(lán)牙模塊和單片機(jī)之間通過(guò)串口輸入HCI指令實(shí)行數(shù)據(jù)通信。當(dāng)使用UART進(jìn)行通信時(shí),藍(lán)牙模塊作為一個(gè)DCE,其串行速度可達(dá)460.8Kbit/s。ROK101007藍(lán)牙模塊的UART接口符合工業(yè)標(biāo)準(zhǔn)16C450,支持多種波特率,提供四個(gè)信號(hào)TXD、RXD、RTS和CTS,均按照null modern方式連接,其中TXD和RXD用于數(shù)據(jù)流傳輸,RTS和CTS用于數(shù)據(jù)流控制。MAX232芯片的工作電壓為5V,這就需要額外使用5個(gè)100nF的電容構(gòu)成外圍電路。S3C4510B微控制器和藍(lán)牙模塊的接口電路如圖2所示。
圖2 MCU和藍(lán)牙模塊接口電路 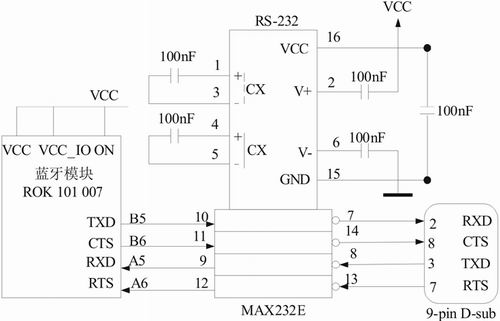
在中心監(jiān)控單元,PC機(jī)和藍(lán)牙模塊的通信通過(guò)USB接口來(lái)實(shí)現(xiàn)。使用USB接口方式通信時(shí),是將藍(lán)牙模塊當(dāng)作一個(gè)USB從設(shè)備與主機(jī)通信的,通過(guò)雙向端口D+和D-傳輸數(shù)據(jù)。對(duì)于PC機(jī)應(yīng)有喚醒和分離兩個(gè)邊帶信號(hào)來(lái)控制PC機(jī)的狀態(tài),當(dāng)主機(jī)處于低功耗模式,如果藍(lán)牙模塊接收到建立連接的請(qǐng)求時(shí),Wake_up引腳輸出高電平,喚醒主機(jī)。主機(jī)的掛起狀態(tài)可通過(guò)Detach信號(hào)來(lái)實(shí)現(xiàn),當(dāng)Detach輸出高電平時(shí),芯片脫離USB狀態(tài)。主機(jī)與藍(lán)牙模塊的接口電路如圖3所示。
圖3 主機(jī)與藍(lán)牙模塊的接口電路 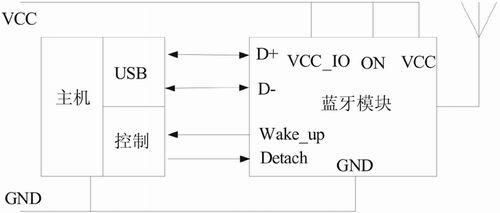
系統(tǒng)軟件設(shè)計(jì)
藍(lán)牙模塊間的ACL數(shù)據(jù)通信流程主要有藍(lán)牙模塊初始化、HCI流量控制設(shè)置、查詢(xún)、建立連接、進(jìn)行數(shù)據(jù)通信和斷開(kāi)連接。初始化程序是單片機(jī)對(duì)藍(lán)牙發(fā)送一系列HCI命令分組并判斷藍(lán)牙返回的事件分組是否正確,當(dāng)藍(lán)牙設(shè)備正確初始化完成之后,通過(guò)Set_ Host_ Controller_ To_ Host_ Flow_ Control指令打開(kāi)主機(jī)控制器到主機(jī)的流量控制,并通過(guò)Host Buffer Size指令來(lái)對(duì)流量控制進(jìn)行配置。之后主設(shè)備查詢(xún)周?chē)乃{(lán)牙設(shè)備并發(fā)出建立連接指令,在成功建立ACL連接之后開(kāi)始數(shù)據(jù)通信。當(dāng)通信完成后,主設(shè)備和從設(shè)備都可以發(fā)出Disconnect命令斷開(kāi)連接。
系統(tǒng)終端探測(cè)電路程序流程如圖4所示,軟件主要是在單片機(jī)上的編程,實(shí)現(xiàn)數(shù)據(jù)的采集,重點(diǎn)是HCI-RS232傳輸層的通信,單片機(jī)主要基于C語(yǔ)言編程,實(shí)現(xiàn)對(duì)前端來(lái)自傳感設(shè)備數(shù)據(jù)進(jìn)行HCI-RS232信息格式的打包,然后通過(guò)傳輸層接口RS232實(shí)現(xiàn)和藍(lán)牙模塊之間的數(shù)據(jù)傳遞。
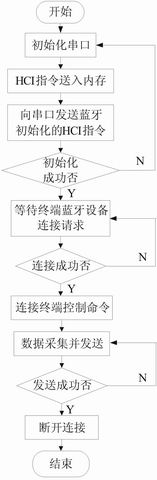
圖4 系統(tǒng)終端探測(cè)電路程序流程
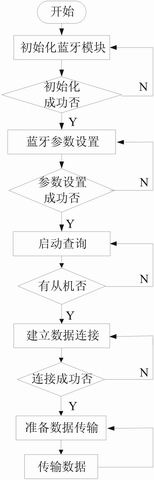
系統(tǒng)中心監(jiān)控電路程序流程如圖5所示,軟件控制主要是實(shí)現(xiàn)藍(lán)牙模塊和PC機(jī)之間的通信,數(shù)據(jù)傳輸是關(guān)鍵部分。程序在循環(huán)中不斷查詢(xún)是否有藍(lán)牙數(shù)據(jù)需要接收和是否有監(jiān)控命令數(shù)據(jù)傳來(lái),需要送藍(lán)牙發(fā)送。藍(lán)牙數(shù)據(jù)接收采用中斷接收方式,而監(jiān)控命令數(shù)據(jù)采用查詢(xún)接收方式,這樣可以達(dá)到最高的工作效率。
圖5 系統(tǒng)中心監(jiān)控電路程序流程
結(jié)語(yǔ)
基于藍(lán)牙技術(shù)的家庭監(jiān)控報(bào)警系統(tǒng),硬件設(shè)計(jì)簡(jiǎn)單,靈敏度高,由于藍(lán)牙技術(shù)采用跳頻模式,信息傳輸就更為安全準(zhǔn)確,同時(shí)在天線(xiàn)發(fā)射允許的范圍內(nèi)藍(lán)牙模塊間信息的傳輸不受空間的限制。隨著藍(lán)牙技術(shù)的普及,其低成本的優(yōu)勢(shì)將得到體現(xiàn),正是由于藍(lán)牙的這些特點(diǎn)使得該系統(tǒng)適應(yīng)性較強(qiáng),在不需要做較大改動(dòng)的情況下就能適用于其它類(lèi)似的監(jiān)控報(bào)警系統(tǒng),具有較高的應(yīng)用價(jià)值,可以推廣應(yīng)用。
參考文獻(xiàn):
1.馬建倉(cāng),羅亞軍,趙玉亭.藍(lán)牙核心技術(shù)及應(yīng)用,科學(xué)出版社.2003.452-495
2.錢(qián)志鴻,揚(yáng)帆,周求湛.藍(lán)牙技術(shù)原理、開(kāi)發(fā)與應(yīng)用,北京航空航天大學(xué)出版社.2006.113-121
3.黃智偉.藍(lán)牙硬件電路[M].北京:北京航空航天大學(xué)出版社,2006.470-488
4.張玉真.數(shù)據(jù)采集藍(lán)牙無(wú)線(xiàn)傳輸模塊研制,西北工業(yè)大學(xué),2004
5.梅燁,杜清珍.TC35i在遠(yuǎn)程壓力監(jiān)控系統(tǒng)中的應(yīng)用,自動(dòng)化儀表,2006.(12)59-62
6.SAMSUNG S3C4510B Data Sheet