
1 引 言
在香煙過濾嘴生產(chǎn)線上,包含紙加熱、預(yù)加熱、縫噴嘴、膠水容器溫度等6路溫度信號(hào)。它們對(duì)溫度的要求很高,要求溫度保持在140℃左右的恒溫狀態(tài)。實(shí)踐表明,常規(guī)的PID控制器因?yàn)槌{(diào)量過大、易受環(huán)境的影響,不能滿足實(shí)際要求。經(jīng)過不斷研究,人們提出了自校正PID控制器和基于模糊推理的自校正PID控制器設(shè)計(jì)方法。前一種方法需要在線辨識(shí)過程模型,計(jì)算量大;后一種方法的參數(shù)可校正范圍過小。在該文中提出了一種新型PID控制算法。該算法計(jì)算量小,易于軟件實(shí)現(xiàn),在實(shí)踐中取得了良好的控制效果。
2 系統(tǒng)介紹
系統(tǒng)由1臺(tái)上位機(jī)和3臺(tái)下位機(jī)組成。上位機(jī)使用KINGVIEW軟件進(jìn)行編程,實(shí)現(xiàn)了實(shí)時(shí)數(shù)據(jù)更新、歷史曲線和實(shí)時(shí)曲線顯示、報(bào)警、數(shù)據(jù)存儲(chǔ)、查詢和備份等功能。下位機(jī)使用了SIEMENS公司的S7-300 PLC。S7-300采用了模塊化設(shè)計(jì),在一塊機(jī)架上可安裝各種模塊。每塊機(jī)架板上最多可安裝8個(gè)模塊。若多于8個(gè)模塊,就必須擴(kuò)展另一塊機(jī)架板。兩塊機(jī)架板之間的通訊通過安裝通訊模塊來實(shí)現(xiàn)。3臺(tái)下位機(jī)分別控制裝盤機(jī)HCF、過濾嘴成型機(jī)KDF2和開松上膠機(jī)AF2。總的控制點(diǎn)數(shù)為200多點(diǎn)。
Step7的PLC網(wǎng)絡(luò)有以下幾種:接口網(wǎng)絡(luò)(MPI)、工業(yè)以太網(wǎng)、PROFIBUS現(xiàn)場(chǎng)總線網(wǎng)、TCP/IP協(xié)議網(wǎng)絡(luò)等。該系統(tǒng)采用了PROFIBUS-DP現(xiàn)場(chǎng)總線網(wǎng)。現(xiàn)場(chǎng)的PLC把分散的數(shù)據(jù)采集上來,并通過PROFIBUS現(xiàn)場(chǎng)總線送到上位機(jī)。
3 新型PID控制算法的原理

圖3—1中:yr是給定值,u是控制量,e是偏差,y是輸出值。
圖3—2中:a、b為所允許的最大誤差范圍。根據(jù)采樣時(shí)刻的公式:
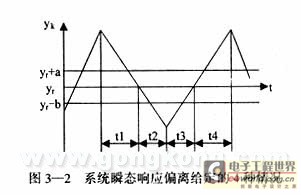
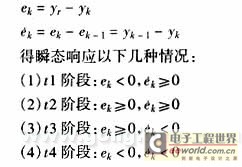
(1)在t1和t4階段:若ek<-a,則停止加熱;若ek≥-a,即誤差在允許范圍內(nèi),此時(shí),又分兩種情況討論:
b)當(dāng)在t4階段時(shí),則維持原狀態(tài)。
(2)在t2和t3階段:若ek≥b,則開始加熱;若ek<b,即誤差在允許范圍內(nèi),此時(shí),又分兩種情況討論:
a)當(dāng)在t3階段時(shí),則停止加熱。在這里提前停止加熱,是為了防止輸出量繼續(xù)上升,反方向偏離給定,從而使輸出維持在誤差允許范圍內(nèi);
b)當(dāng)在t2階段時(shí),則維持原狀態(tài)。
4 新型PID控制算法在S7-300 PLC中的軟件實(shí)現(xiàn)
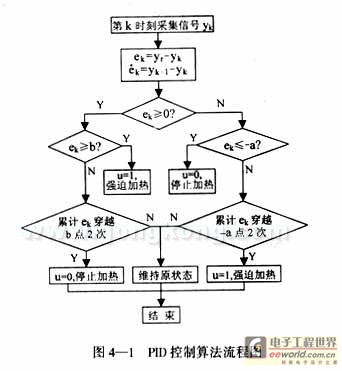
在S7-300 PLC中,使用了梯形圖編程方法。在庫中有3個(gè)與PID調(diào)節(jié)器相關(guān)的功能塊FB41、FB42和FB43。FB41用于模擬PID調(diào)節(jié)器,F(xiàn)B42用于數(shù)字PID調(diào)節(jié)器,F(xiàn)B43是脈沖發(fā)生器,用于輸出量為脈沖的PID調(diào)節(jié)器。在這里,因?yàn)檩斎肓渴菧囟刃盘?hào),是模擬量,而輸出又是開關(guān)量,所以調(diào)用了功能塊FB41和FB43。新型PID算法的流程圖如圖4—1所示。
5 結(jié)束語