
電機(jī)的位置檢測在電機(jī)控制中是十分重要的,特別是需要根據(jù)精確轉(zhuǎn)子位置控制電機(jī)運動狀態(tài)的應(yīng)用場合,如位置伺服系統(tǒng)。電機(jī)控制系統(tǒng)中的位置檢測通常有:微電機(jī)解算元件,光電元件,磁敏元件,電磁感應(yīng)元件等。這些位置檢測傳感器或者與電機(jī)的非負(fù)載端同軸連接,或者直接安裝在電機(jī)的特定的部位。其中光電元件的測量精度較高,能夠準(zhǔn)確的反應(yīng)電機(jī)的轉(zhuǎn)子的機(jī)械位置,從而間接的反映出與電機(jī)連接的機(jī)械負(fù)載的準(zhǔn)確的機(jī)械位置,從而達(dá)到精確控制電機(jī)位置的目的。在本文中我將主要介紹高精度的光電編碼器的內(nèi)部結(jié)構(gòu)、工作原理與位置檢測的方法。
一、光電編碼器的介紹:
光電編碼器是通過讀取光電編碼盤上的圖案或編碼信息來表示與光電編碼器相連的電機(jī)轉(zhuǎn)子的位置信息的。根據(jù)光電編碼器的工作原理可以將光電編碼器分為絕對式光電編碼器與增量式光電編碼器,下面我就這兩種光電編碼器的結(jié)構(gòu)與工作原理做介紹。
(一)、絕對式光電編碼器
絕對式光電編碼器如圖所示,他是通過讀取編碼盤上的二進(jìn)制的編碼信息來表示絕對位置信息的。
編碼盤是按照一定的編碼形式制成的圓盤。圖1是二進(jìn)制的編碼盤,圖中空白部分是透光的,用“0”來表示;涂黑的部分是不透光的,用“1”來表示。通常將組成編碼的圈稱為碼道,每個碼道表示二進(jìn)制數(shù)的一位,其中最外側(cè)的是最低位,最里側(cè)的是最高位。如果編碼盤有4個碼道,則由里向外的碼道分別表示為二進(jìn)制的23、22、21和20,4位二進(jìn)制可形成16個二進(jìn)制數(shù),因此就將圓盤劃分16個扇區(qū),每個扇區(qū)對應(yīng)一個4位二進(jìn)制數(shù),如0000、0001、…、1111。
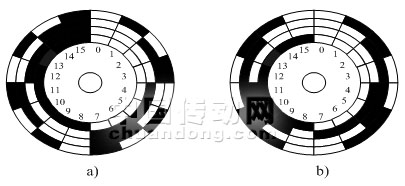
圖1
按照碼盤上形成的碼道配置相應(yīng)的光電傳感器,包括光源、透鏡、碼盤、光敏二極管和驅(qū)動電子線路。當(dāng)碼盤轉(zhuǎn)到一定的角度時,扇區(qū)中透光的碼道對應(yīng)的光敏二極管導(dǎo)通,輸出低電平“0”,遮光的碼道對應(yīng)的光敏二極管不導(dǎo)通,輸出高電平“1”,這樣形成與編碼方式一致的高、低電平輸出,從而獲得扇區(qū)的位置腳。
(二)、增量式光電編碼器
增量式光電編碼器是碼盤隨位置的變化輸出一系列的脈沖信號,然后根據(jù)位置變化的方向用計數(shù)器對脈沖進(jìn)行加/減計數(shù),以此達(dá)到位置檢測的目的。它是由光源、透鏡、主光柵碼盤、鑒向盤、光敏元件和電子線路組成。
增量式光電編碼器的工作原理是是由旋轉(zhuǎn)軸轉(zhuǎn)動帶動在徑向有均勻窄縫的主光柵碼盤旋轉(zhuǎn),在主光柵碼盤的上面有與其平行的鑒向盤,在鑒向盤上有兩條彼此錯開90o相位的窄縫,并分別有光敏二極管接收主光柵碼盤透過來的信號。工作時,鑒向盤不動,主光柵碼盤隨轉(zhuǎn)子旋轉(zhuǎn),光源經(jīng)透鏡平行射向主光柵碼盤,通過主光柵碼盤和鑒向盤后由光敏二極管接收相位差90o的近似正弦信號,再由邏輯電路形成轉(zhuǎn)向信號和計數(shù)脈沖信號。為了獲得絕對位置角,在增量式光電編碼器有零位脈沖,即主光柵每旋轉(zhuǎn)一周,輸出一個零位脈沖,使位置角清零。利用增量式光電編碼器可以檢測電機(jī)的位置和速度。
二、光電編碼器的測量方法:
光電編碼器在電機(jī)控制中可以用來測量電機(jī)轉(zhuǎn)子的磁場位置和機(jī)械位置以及轉(zhuǎn)子的磁場和機(jī)械位置的變化速度與變化方向。下面就我就光電編碼器在這幾方面的應(yīng)用方法做一下介紹。
(一)、使用光電編碼器來測量電機(jī)的轉(zhuǎn)速
可以利用定時器/計數(shù)器配合光電編碼器的輸出脈沖信號來測量電機(jī)的轉(zhuǎn)速。具體的測速方法有M法、T法和M/T法3種。
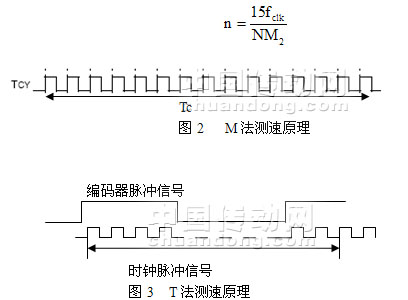
M法又稱之為測頻法,其測速原理是在規(guī)定的檢測時間Tc內(nèi),對光電編碼器輸出的脈沖信號計數(shù)的測速方法,如圖2所示,例如光電編碼器是N線的,則每旋轉(zhuǎn)一周可以有4N個脈沖,因為兩路脈沖的上升沿與下降沿正好使編碼器信號4倍頻。現(xiàn)在假設(shè)檢測時間是Tc,計數(shù)器的記錄的脈沖數(shù)是M1,則電機(jī)的每分鐘的轉(zhuǎn)速為
在實際的測量中,時間Tc內(nèi)的脈沖個數(shù)不一定正好是整數(shù),而且存在最大半個脈沖的誤差。如果要求測量的誤差小于規(guī)定的范圍,比如說是小于百分之一,那么M1就應(yīng)該大于50。在一定的轉(zhuǎn)速下要增大檢測脈沖數(shù)M1以減小誤差,可以增大檢測時間Tc單考慮到實際的應(yīng)用檢測時間很短,例如伺服系統(tǒng)中的測量速度用于反饋控制,一般應(yīng)在0.01秒以下。由此可見,減小測量誤差的方法是采用高線數(shù)的光電編碼器。
M法測速適用于測量高轉(zhuǎn)速,因為對于給定的光電編碼器線數(shù)N機(jī)測量時間Tc條件下,轉(zhuǎn)速越高,計數(shù)脈沖M1越大,誤差也就越小。
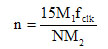
T法也稱之為測周法,該測速方法是在一個脈沖周期內(nèi)對時鐘信號脈沖進(jìn)行計數(shù)的方法,如圖3所示。例如時鐘頻率為fclk,計數(shù)器記錄的脈沖數(shù)為M2,光電編碼器是N線的,每線輸出4N個脈沖,那么電機(jī)的每分鐘的轉(zhuǎn)速為
為了減小誤差,希望盡可能記錄較多的脈沖數(shù),因此T法測速適用于低速運行的場合。但轉(zhuǎn)速太低,一個編碼器輸出脈沖的時間太長,時鐘脈沖數(shù)會超過計數(shù)器最大計數(shù)值而產(chǎn)生溢出;另外,時間太長也會影響控制的快速性。與M法測速一樣,選用線數(shù)較多的光電編碼器可以提高對電機(jī)轉(zhuǎn)速測量的快速性與精度。
M/T法測速是將M法和T法兩種方法結(jié)合在一起使用,在一定的時間范圍內(nèi),同時對光電編碼器輸出的脈沖個數(shù)M1和M2進(jìn)行計數(shù),則電機(jī)每分鐘的轉(zhuǎn)速為
實際工作時,在固定的Tc時間內(nèi)對光電編碼器的脈沖計數(shù),在第一個光電編碼器上升沿定時器開始定時,同時開始記錄光電編碼器和時鐘脈沖數(shù),定時器定時Tc時間到,對光電編碼器的脈沖停止計數(shù),而在下一個光電編碼器的上升沿到來時刻,時鐘脈沖才停止記錄。采用M/T法既具有M法測速的高速優(yōu)點,又具有T法測速的低速的優(yōu)點,能夠覆蓋較廣的轉(zhuǎn)速范圍,測量的精度也較高,在電機(jī)的控制中有著十分廣泛的應(yīng)用。
(二)使用增量式光電編碼器來判別電機(jī)轉(zhuǎn)速方向的原理
增量式光電編碼器輸出兩路相位相差90o的脈沖信號A和B,當(dāng)電機(jī)正轉(zhuǎn)時,脈沖信號A的相位超前脈沖信號B的相位90o,此時邏輯電路處理后可形成高電平的方向信號Dir。當(dāng)電機(jī)反轉(zhuǎn)時,脈沖信號A的相位滯后脈沖信號B的相位90o,此時邏輯電路處理后的方向信號Dir為低電平。因此根據(jù)超前與滯后的關(guān)系可以確定電機(jī)的轉(zhuǎn)向。其轉(zhuǎn)速辯相的原理如圖4所示
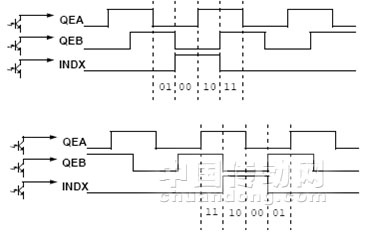
圖4轉(zhuǎn)向判別原理圖
(三)、增量式光電編碼器的反饋脈沖的四倍頻原理
在使用增量式編碼器時,通過計相位相差90o的兩路正交脈沖信號A和B的上升沿與下降沿已達(dá)到將增量式編碼器的反饋脈沖四倍頻的目的。這樣在不增加增量式光電編碼器的線數(shù)的情況下,就可以獲得更精度高的位置脈沖信息,以實現(xiàn)對電機(jī)位置的精確控制。其工作原理與脈沖的相位關(guān)系如圖5所示
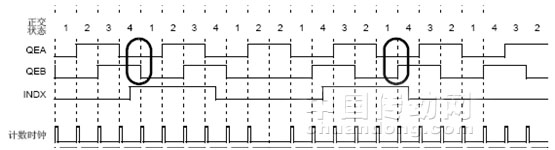
圖5 脈沖四倍頻相位關(guān)系圖
結(jié)束語:
光電式編碼器有著良好的抗干擾特性與應(yīng)用的可靠性,在電機(jī)控制這種有著極高電磁感染的應(yīng)用環(huán)境下有著廣闊的應(yīng)用前景。相信在不久的將來光電式編碼器一定會在電機(jī)控制領(lǐng)域發(fā)揮更為重要的作用。而我們對于光電式編碼器的研究也就顯得格外的重要。