
自動(dòng)駕駛產(chǎn)業(yè)要想真正落地,需要獲得大數(shù)據(jù)、大計(jì)算能力、5G、云端,以及核心零部件、高精度地圖、智慧城市、智慧道路、視覺認(rèn)知道路等的支持。安全來不得半點(diǎn)妥協(xié),從輔助到自動(dòng)駕駛一定是一個(gè)循序漸進(jìn)的過程,而且必須安全第一。
特斯拉躲了“3.15”卻沒能躲過上海車展,維權(quán)車主表示“不會(huì)向特斯拉妥協(xié)”;特斯拉方面卻回應(yīng):“不妥協(xié)同樣是我們的態(tài)度。”
新華社發(fā)文《誰(shuí)給了特斯拉“不妥協(xié)”的底氣》;特斯拉高管回應(yīng):“沒有辦法妥協(xié),這是新產(chǎn)品發(fā)展必經(jīng)的一個(gè)過程。”還強(qiáng)調(diào):“自己調(diào)研顯示,90%客戶都愿意再次選擇特斯拉。”
假如90%的特斯拉開得很好,當(dāng)然可能還會(huì)選擇,那么另外10%呢?是說隨它變成“碰碰車”,失去小部分用戶也無所謂嗎?
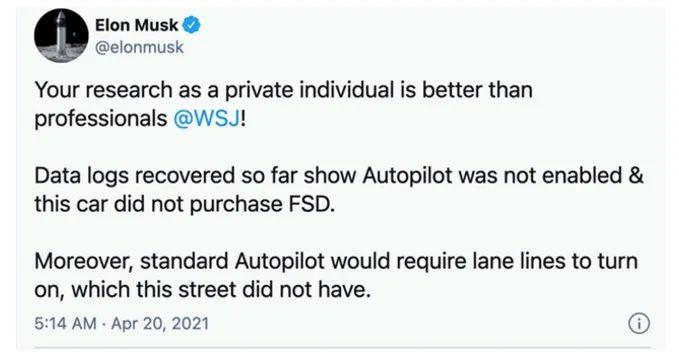
近日,美國(guó)德州一輛特斯拉事故造成兩人傷亡,美國(guó)監(jiān)管部門正在審查特斯拉。馬斯克表示:“……目前恢復(fù)的數(shù)據(jù)日志顯示Autopilot沒有打開,而且這輛車沒有購(gòu)買FSD(全自動(dòng)駕駛系統(tǒng))。此外,標(biāo)準(zhǔn)自動(dòng)駕駛系統(tǒng)需要車道線才能打開,而這此次事發(fā)的街道沒有車道線。”聽懂了嗎?駕駛者全責(zé)!
謹(jǐn)以特斯拉一些經(jīng)典事故為例:使用自動(dòng)駕駛輔助系統(tǒng)屢撞白色大貨車、失控、突然加速等。我們沒有黑匣子,不好妄下定論,只能從技術(shù)角度討論發(fā)生事故的可能原因,以及從哪些方面入手來解決問題。
再次說明,以下討論并不針對(duì)特定廠商,意在透過現(xiàn)象看本質(zhì),可能有助于發(fā)現(xiàn)問題的根源。同時(shí)也提醒消費(fèi)者,目前的智能駕駛技術(shù)再怎么成熟,也還不及駕駛員自身的應(yīng)變能力,作為高級(jí)駕駛員輔助系統(tǒng)(ADAS,本文自動(dòng)駕駛均等同于ADAS)只能對(duì)駕駛安全起到一定輔助作用,畢竟代替不了人,因此現(xiàn)在還不能盲目相信四個(gè)輪子上的計(jì)算機(jī);一旦失控,那就是2噸左右的一堆鋼鐵在高速行駛,誰(shuí)都受不了。
參與此次討論的包括:從事攝像頭、雷達(dá)、激光雷達(dá)、汽車架構(gòu)、基礎(chǔ)設(shè)施、處理器研發(fā)和系統(tǒng)集成廠商的技術(shù)管理人員。他們不僅分析了問題,而且結(jié)合自己的實(shí)踐給出了一些解決辦法。
車輛事故是系統(tǒng)哪方面出了的問題?
意法半導(dǎo)體ADAS、ASIC和Audio(AAD)事業(yè)部副總經(jīng)理兼汽車和分立器件產(chǎn)品部(ADG)ADAS協(xié)調(diào)專員Martin Duncan認(rèn)為:“許多因素都可能引起系統(tǒng)故障,其中包括系統(tǒng)是否成熟。重要的是,在部署到現(xiàn)場(chǎng)應(yīng)用之前,制造商必須先充分驗(yàn)證其系統(tǒng)功能,然后再持續(xù)監(jiān)測(cè)系統(tǒng)上路后的性能。”

意法半導(dǎo)體Martin Duncan
他指出,所有開發(fā)人員必須不斷研究極端情況,從現(xiàn)場(chǎng)故障中學(xué)習(xí),并在實(shí)際應(yīng)用中升級(jí)算法,以提高車輛的安全性。盡管對(duì)于駕駛員而言,這聽起來可能是一件很難的事情,保持警惕且不要過度信任ADAS系統(tǒng)也非常重要——這才是駕駛監(jiān)控系統(tǒng)發(fā)揮作用的地方。
安森美半導(dǎo)體智能感知技術(shù)應(yīng)用經(jīng)理張厚新則從傳感器部署方面解讀了這個(gè)問題,他表示:“在傳感器部署上,發(fā)生事故的自動(dòng)駕駛系統(tǒng)看來存在欠缺全面考慮的問題,傳感器的不足不能以自動(dòng)駕駛算法來彌補(bǔ),因?yàn)樵趥鞲衅髟馐艿焦艋蛘咭馔馇闆r下,算法自然就失效了。”

安森美半導(dǎo)體張厚新
他解釋說,強(qiáng)光或者是大面積遮擋物都會(huì)影響到前視攝像頭的圖像識(shí)別,這樣自動(dòng)駕駛就會(huì)變得不可靠。攝像頭失效了,但汽車的防撞系統(tǒng)是基于毫米波雷達(dá)的,毫米波雷達(dá)應(yīng)該在150米左右就能夠識(shí)別出車輛的存在,并且提前預(yù)警。如果毫米波雷達(dá)被卡車車廂面積遮擋住了,就沒有辦法判斷前方有幾輛車。因?yàn)樵诤撩撞ɡ走_(dá)內(nèi)部的天線矩陣發(fā)出去的信號(hào)都有回波,會(huì)造成毫米波雷達(dá)無法分辨出這是一個(gè)什么樣的汽車,從而被忽略掉,危險(xiǎn)就會(huì)發(fā)生。
大唐高鴻車聯(lián)網(wǎng)首席專家、大唐高鴻智能網(wǎng)聯(lián)產(chǎn)品事業(yè)部副總經(jīng)理胡金玲說:“自動(dòng)駕駛和車聯(lián)網(wǎng)技術(shù)有很大關(guān)系,車聯(lián)網(wǎng)通信將有助于自動(dòng)駕駛實(shí)現(xiàn),因?yàn)橥ㄟ^車與車之間可靠、高速的低時(shí)延通信,在發(fā)生狀況時(shí)可以第一時(shí)間采取措施避免發(fā)生碰撞,提升交通安全性。”

大唐高鴻胡金玲
她指出,車聯(lián)網(wǎng)通信和自動(dòng)駕駛還是兩個(gè)范疇,有了通信的支持,將會(huì)促進(jìn)自動(dòng)駕駛的普及。不同傳感器,各有弱點(diǎn)和局限性,在某些情況下可能會(huì)失效,即使是激光雷達(dá),在雨雪霧等惡劣天氣性能會(huì)受到影響,而且其成本不菲。車在行駛當(dāng)中總是會(huì)有一些盲區(qū),車本身再智能,也無法感知到全部信息,如果要做到,成本會(huì)更高,而小范圍的演示也不足以覆蓋非常復(fù)雜的實(shí)際駕駛環(huán)境。
傳感器的選擇、融合及冗余怎么做?
對(duì)于這個(gè)問題,意法半導(dǎo)體Martin Duncan這樣看,主傳感器是一個(gè)視頻攝像頭;前視攝像頭是一個(gè)700萬(wàn)像素的三目攝像頭,包括3個(gè)獨(dú)立的不同視場(chǎng)角的成像傳感器。根據(jù)輔助/自動(dòng)駕駛級(jí)別需求,全景環(huán)繞和后視還需要有多個(gè)低分辨率攝像頭。今天,汽車的前面、后面或四面都裝有探測(cè)雷達(dá),且已從24GHz升級(jí)到77GHz。前置雷達(dá)下一步將升級(jí)到4D成像雷達(dá)。有些公司已在研發(fā)激光雷達(dá)和熱成像攝像頭,不過,如今應(yīng)用規(guī)模還很小。精確定位結(jié)合共享壓縮地圖數(shù)據(jù)是意法半導(dǎo)體看到的增長(zhǎng)較快的市場(chǎng)。
他說,意法半導(dǎo)體一直在在改善圖像傳感器的靈敏度和分辨率,同時(shí)也在增加雷達(dá)通道數(shù)量,以更好地解決高感測(cè)度問題。在算法方面,并行運(yùn)行可以不同方式理解場(chǎng)景,目的是縮短檢測(cè)時(shí)間,并減少假陽(yáng)和假陰。另外還引入了其他傳感器,如熱成像傳感器、激光雷達(dá)、SWIR紅外傳感器或事件傳感器,以發(fā)揮各自技術(shù)在不同條件下的“視力”,能夠?yàn)閭鞲衅魅哂嘈r?yàn)功能提供確認(rèn)數(shù)據(jù),增加自動(dòng)駕駛的安全性。
毫末智行首席交付官CIO甄龍豹?jiǎng)t從安全角度回答了傳感器冗余的問題。他認(rèn)為,對(duì)于自動(dòng)駕駛汽車而言,安全是首要前提。自動(dòng)駕駛只有像航空領(lǐng)域那樣做到冗余,才能確保真正的安全。

毫末智行甄龍豹
他說:“安全冗余是實(shí)現(xiàn)乘用車高級(jí)別自動(dòng)駕駛的先決條件。毫末智行的業(yè)界首個(gè)全冗余量產(chǎn)系統(tǒng)已搭載長(zhǎng)城汽車,在安全方面構(gòu)建了6大冗余技術(shù)體系:感知冗余、控制冗余、架構(gòu)冗余、電源冗余、制動(dòng)冗余和轉(zhuǎn)向冗余。這樣就做到了對(duì)駕乘人員的全方位守護(hù),實(shí)現(xiàn)了業(yè)內(nèi)領(lǐng)先的失效可運(yùn)行功能。”他也表示,隨著技術(shù)的發(fā)展,部署冗余技術(shù)的成本會(huì)快速下降,得到更多用戶認(rèn)可之后,廠商就可以更大范圍進(jìn)行部署。
胡金玲更多是從車聯(lián)網(wǎng)的角度考慮,她認(rèn)為,傳感器融合目的是為了保證安全。車如果不聯(lián)網(wǎng),有也有很多安全功能,像安全帶、車身強(qiáng)度,還有雷達(dá)、攝像頭等等。但是,現(xiàn)在一些車企因?yàn)榇饲巴ㄐ偶夹g(shù)受限,量產(chǎn)成本等原因并沒有使用激光雷達(dá)及V2X等,或許正是其車輛無法發(fā)現(xiàn)路上的某種龐然大物的重要原因之一。
車路協(xié)同通過車和車、車和路的交互可以幫助汽車更好地感知周圍環(huán)境,如果兩個(gè)車都裝了通信模塊進(jìn)行交互,就可以采取一些措施,做出更快、更準(zhǔn)確的判斷。與此同時(shí),還可以解決傳感器融合成本的問題,如果路側(cè)信息進(jìn)一步完善,可能就不會(huì)需要那么貴的激光雷達(dá)。“車聯(lián)網(wǎng)已成為自動(dòng)駕駛的支撐技術(shù),在傳感器融合之余又為安全保了一道險(xiǎn)。”她說。
安霸上海軟件研發(fā)高級(jí)總監(jiān)孫魯毅則認(rèn)為,視覺感知有可能超越人眼。他說:“在多種傳感器融合方面,視覺感知起到了非常重要的作用,這是攝像頭的核心價(jià)值。”兩三年前,為了實(shí)現(xiàn)輔助駕駛和自動(dòng)駕駛,需要有非常多的攝像頭,有的負(fù)責(zé)近距離,有的負(fù)責(zé)遠(yuǎn)距離,而且要覆蓋不同角度,不同攝像頭之間的視角還要有疊加,目的是看到各個(gè)方位的目標(biāo)物體,并以適當(dāng)?shù)娜哂鄟硖岣呖煽啃浴?/p>

安霸孫魯毅
他指出,傳統(tǒng)攝像頭可部分取代人眼,隨著視覺感知和光電技術(shù)的進(jìn)步,現(xiàn)在的攝像頭不僅可以比人眼看得更清楚,能夠看可見光,還能看可熱成像光。現(xiàn)在,視覺感知器已經(jīng)在某種程度上超越了人眼看到的范圍。隨著技術(shù)的發(fā)展,將來一定會(huì)有更多圖像傳感器加入視覺處理單元以取代人眼。
安森美的張厚新表示,隨著這幾年技術(shù)的進(jìn)步和事故的積累,大廠采取的自動(dòng)駕駛技術(shù)手段已趨于一致,即采用多傳感器融合來解決單一傳感器的不足,并實(shí)現(xiàn)冗余設(shè)計(jì)。作為主要的車規(guī)級(jí)傳感器供應(yīng)商,安森美半導(dǎo)體從2014年收購(gòu)Aptina開始,又逐步收購(gòu)了毫米波雷達(dá)和激光雷達(dá)公司,結(jié)合自身的超聲波傳感器,成為首家能提供4種自動(dòng)駕駛感知傳感器的公司。
他說,從傳感器角度看,要避免類似的事故發(fā)生,需要多傳感器融合,當(dāng)然也不只是這四種,還有高精度地圖、V2X、5G技術(shù)的融入。這樣,在某種傳感器失效的情況下,系統(tǒng)仍然有足夠的感知信息作出正確的決策,從而避免意外發(fā)生。僅就單一傳感器而言,如何保證其可靠工作,當(dāng)自身有問題發(fā)生時(shí)可以及時(shí)通知系統(tǒng),這就是所謂的功能安全設(shè)計(jì)。對(duì)一些失效提前預(yù)警,能有效減輕平臺(tái)的系統(tǒng)消耗,如安森美半導(dǎo)體已滿足ASIL-C級(jí)別功能安全標(biāo)準(zhǔn)的圖像傳感器。
除了“眼睛”還要有很強(qiáng)的“大腦”
那么,AI/機(jī)器學(xué)習(xí)的處理器算力瓶頸如何解決呢?意法半導(dǎo)體Martin Duncan說:“每次更新?lián)Q代,處理器性能都提高10倍。過去15年中,我們和Mobileye建立了長(zhǎng)期的合作伙伴關(guān)系,一直在合作開發(fā)這方面的技術(shù),范圍涵蓋全自動(dòng)駕駛汽車的所有功能。”
介紹說,Mobileye今年開始生產(chǎn)第5代EyeQ產(chǎn)品,將在其汽車芯片中首次采用7nm FinFET技術(shù);同時(shí)還按照各種功能和算法的不同需求優(yōu)化定制加速器,以平衡不同的運(yùn)算能力要求,其中包括既可以在本地也可以在云端完成的機(jī)器學(xué)習(xí)。預(yù)計(jì)未來還會(huì)對(duì)中央處理器性能有更高的要求,所以需要找到一種更有效的方式來傳送遠(yuǎn)程傳感器數(shù)據(jù),這就是打造車載數(shù)據(jù)的高速路MIPI A-PHY(CSI-2)標(biāo)準(zhǔn)的原因,MIPI A-PHY的最大速率為16GB,可傳送超過700萬(wàn)像素的圖像傳感器視頻流。
安森美的張厚新指出,除了增強(qiáng)環(huán)境感知,當(dāng)前的自動(dòng)駕駛車輛在系統(tǒng)平臺(tái)數(shù)據(jù)處理和算法能力方面還要進(jìn)一步加強(qiáng)。隨著自動(dòng)駕駛級(jí)別的提高,算力也在呈指數(shù)級(jí)增長(zhǎng),在L3級(jí)以上,最少需要100T-200TFLOPS的算力,所以平臺(tái)廠商也在推出更強(qiáng)算力的平臺(tái)來應(yīng)對(duì)。同樣算法迭代也是很重要,目前也有專門做自動(dòng)駕駛算法的公司,可以提供高效的算法保證。
安霸的孫魯毅認(rèn)為,好的視覺感知除了要有很好的“眼睛”,還需要很強(qiáng)的“大腦”。自動(dòng)駕駛和智能座艙應(yīng)用很難想象要跑多少算法,所以要根據(jù)客戶的要求增加新的功能,不能用一種算法取代未來的需求,要兼容各種算法。安霸AI加速引擎設(shè)計(jì)方向是一種通用策略,有助于各廠商基于神經(jīng)網(wǎng)絡(luò)算法的運(yùn)行,并且算法能夠移植,根據(jù)需求進(jìn)行調(diào)整,特別是容易使用,還可以實(shí)現(xiàn)網(wǎng)絡(luò)優(yōu)化。
地平線創(chuàng)始人及CEO余凱認(rèn)為,實(shí)現(xiàn)自動(dòng)駕駛不僅僅是軟件算法、深度學(xué)習(xí)算法,也不僅僅是傳感器,而是很嚴(yán)峻的芯片計(jì)算問題。
今天的智能汽車正經(jīng)歷一場(chǎng)歷史性的變革,而其發(fā)展的核心瓶頸是算力不足,因此,追逐大算力的時(shí)代已經(jīng)到來,智能化競(jìng)爭(zhēng)的提速首先以算力軍備競(jìng)賽的形式上演。

地平線余凱
那么,什么是芯片算力?什么又是大算力呢?他說,隨著大數(shù)據(jù)、人工智能等計(jì)算密集的數(shù)學(xué)和加密相關(guān)操作難度的日益提升,作為底層核心技術(shù)的芯片計(jì)算能力必須不斷提升,芯片的制程、乘法器數(shù)目和最高主頻一次次突破自己的極限,使算力不斷刷新增大。在數(shù)字經(jīng)濟(jì)大背景下,對(duì)算力有了爆發(fā)式需求,使之成為了新的生產(chǎn)力。
余凱也指出:余凱說:“算力其實(shí)并不代表汽車智能芯片的真實(shí)性能,所以我們提出了MAPS評(píng)估方法(在精度有保障范圍內(nèi)的平均處理速度)。今天所有的車廠都在標(biāo)1000、2000、3000TOPS,第一,在摩爾定律的意義上是不可維系的,第二,對(duì)真正人工智能自動(dòng)駕駛的計(jì)算并沒有實(shí)際意義。”
他同時(shí)認(rèn)為,就像智能手機(jī)時(shí)代一樣,一些手機(jī)公司嘗試過自研芯片,但都不是很成功。最后他們都用了高通和聯(lián)發(fā)科的芯片。汽車也是一樣,真正自研芯片的目前只有特斯拉。還是專業(yè)化的分工有助于提升效率,專業(yè)的人干專業(yè)的事。
總結(jié)一下
自動(dòng)駕駛產(chǎn)業(yè)要想真正落地,需要獲得大數(shù)據(jù)、大計(jì)算能力、5G、云端,以及核心零部件、高精度地圖、智慧城市、智慧道路、視覺認(rèn)知道路等的支持。安全來不得半點(diǎn)妥協(xié),從輔助到自動(dòng)駕駛一定是一個(gè)循序漸進(jìn)的過程,而且必須安全第一。
更多信息可以來這里獲取==>>電子技術(shù)應(yīng)用-AET<<
