
馬斯克曾表示,高精度地圖是一個“很糟糕的想法”,和拒絕激光雷達一樣堅持不用高精度地圖,而是采用眾包模式(靠車輛攝像頭等采集數(shù)據(jù))繪制高精度地圖,以提高自身感知能力。高德地圖副總裁、汽車業(yè)務中心總經(jīng)理韋東說:“眾包模式采集高精度地圖在初始階段是一個玩笑,是對科學的不尊重。”
特斯拉從來不缺新聞加熱搜,甩鍋不止、一季度營收翻兩番、車主維權(quán)、國家安全、他人指使、禁止銷售……讓人應接不暇。因為不是監(jiān)管結(jié)構(gòu),這些我們都管不了,職業(yè)本分,只能從專業(yè)角度來解讀技術(shù)戲份。
最近接觸到汽車供應鏈上、中、下游的一些企業(yè)高管,以及一些科研機構(gòu)的專家,他們都對現(xiàn)在的ADAS(輔助)和自動駕駛安全有自己的觀點和看法。還是那句話,不是針對特斯拉,只是就事論事。
感知歧義:沒有拿到駕照的司機
2020年1月,特斯拉將地圖數(shù)據(jù)服務更換為百度地圖。特斯拉CEO埃隆·馬斯克(Elon Musk)曾表示,高精度地圖是一個“很糟糕的想法”,和拒絕激光雷達一樣堅持不用高精度地圖,而是采用眾包模式(靠車輛攝像頭等采集數(shù)據(jù))繪制高精度地圖,以提高自身感知能力。高德地圖副總裁、汽車業(yè)務中心總經(jīng)理韋東說:“眾包模式采集高精度地圖在初始階段是一個玩笑,是對科學的不尊重。”
從實際體驗來看,特斯拉的車道保持功能擁有很大自主權(quán),在車道甚至彎道中都可以自主轉(zhuǎn)動方向盤來調(diào)節(jié)車輛位置。如果駕駛者想通過轉(zhuǎn)動方向盤來取消該功能,需要釋放很大的轉(zhuǎn)動力度。而如果出現(xiàn)車道線不清晰、交錯混亂的情況,有可能會導致系統(tǒng)誤識別,使車輛偏離“預想車道”。
上海車展上,小鵬汽車發(fā)布了全球首款搭載雙激光雷達的P5量產(chǎn)車,另搭載了13個高清攝像頭、5個毫米波雷達、12個超聲波傳感器和1組高精度定位單元。這是不是對現(xiàn)有主流安全輔助駕駛技術(shù)的降維打擊還不好說,但激光雷達和地圖恰恰可以解決城市低速、復雜路面自動駕駛遇到的一些問題。
小鵬汽車一直致力于自動駕駛技術(shù)的核心差異化,其上海自動駕駛中心算法專家劉德浩博士解釋說“差異化核心首先是‘閉環(huán)’”。他認為,到目前為止,能夠全棧自研高級別輔助駕駛的只有特斯拉和小鵬。特斯拉做了FSD(完全自動駕駛)功能套件。從2.0到3.0迭代,小鵬從數(shù)據(jù)采集開始,通過數(shù)據(jù)交互、模型優(yōu)化、模型驗證、問題反饋等形成了完整閉環(huán),不斷對算法進行快速迭代。
談到視覺感知,他指出,如果前面的一輛越野車搭載了一個自行車,這時候感知的是越野車還是自行車?這就會出現(xiàn)歧義性,實際路況中各種各樣的問題都會碰到。又如并線加塞、大貨車的情況,都需要在感知方面進行優(yōu)化。
劉德浩說:“雷達對周圍環(huán)境的理解能力更好,可以提升駕駛體驗和安全性。依賴于純視覺也能做高速場景、城市場景,但它是一個沒有拿到駕照的司機,是一個殺手,雖然它具備一定能力,或者說至少證明了一定的能力,依靠純視覺干這個事,不是干好就是干壞。”
在融合方面,小鵬通過高精度地圖增強來體現(xiàn)高速自主導航駕駛(NGP)的實效性,將視覺感知做到200米,提前知道路況;通過精確增強解決目前城市場景道路起伏非常大導致地圖誤差較大的問題;通過完整性增強補充高速公路上一些變化的數(shù)據(jù)。
不用高精度地圖自動駕駛很痛苦
上海車展期間,華為智能車云服務產(chǎn)品部總經(jīng)理廖振欽稱,將在2021年內(nèi)實現(xiàn)全國高快速路和北上廣深高精度地圖商用;增加天津、重慶、成都、杭州的數(shù)據(jù);2022年覆蓋面擴大到20個以上城市。可以想見,高精度地圖定位可以幫助自動駕駛汽車獲得超過普通車載傳感器探測距離的感知能力,拓展多種更復雜功能場景應用。
特斯拉沒有高精度地圖,當突然發(fā)現(xiàn)這條路不能直走時,不得不硬性變道,駕乘感覺很是突兀。而對于相當一部分人來說,開車是一件沒什么樂趣的體力勞動,特別是路況不熟悉時會有違章焦慮。不使用高精度地圖,自動駕駛也將很痛苦。所以將地形和數(shù)字地圖數(shù)據(jù)與傳感器數(shù)據(jù)(GPS接收器)相結(jié)合的電子地平線(eHorizon)被認為是實現(xiàn)車輛預測性控制的很好手段。
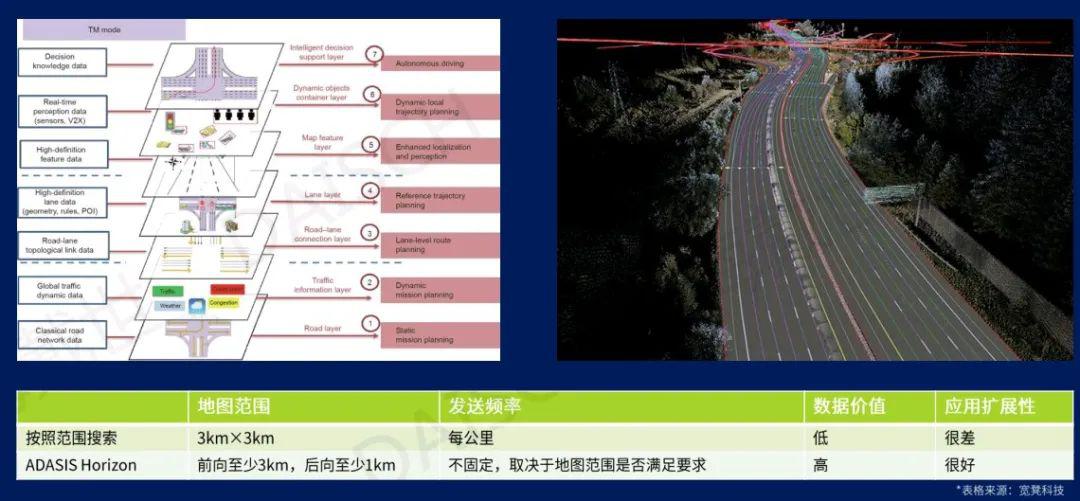
圖:電子地平線
上海戴世智能CEO陸海峰認為,自動駕駛技術(shù)有四大功能模塊:智能定位、環(huán)境感知、行為預測、決策與路徑規(guī)劃。目前,支持多傳感器融合的智能定位系統(tǒng)有兩大痛點:一是車道級高精度定位和引導能力,二是具有前裝可能性的成本與質(zhì)量要求。
三大傳感器中實際用于定位的只有攝像頭,即橫向車輛保持。而各種傳感器及其輸出與高精度地圖豐富的內(nèi)容相比相當骨感。激光雷達裝車率低,有待發(fā)展;雷達暫時無法用于定位;攝像頭適合橫向定位,縱向量測不準;GNSS(全球?qū)Ш叫l(wèi)星系統(tǒng))+RTK(實時動態(tài))才是當前縱向定位的頂梁柱。
持相同觀點的還有騰訊地圖的谷小峰:“RTK還是比較有用的,比較好用的。原來沒有意識到,現(xiàn)在認識到了頂梁柱的作用。”
廣汽研究院郭繼舜博士:“對定位精度的要求,現(xiàn)在測下來,只要是脫手,都必須要用RTK。”
小鵬P7采用高德提供的基于激光點云圖像生成的高精度地圖,精度達分米級;三重高精度定位硬件(GPS+RTK+IMU)全局定位精度可達厘米級,這是一個高精度定位的三冗余系統(tǒng)。
關(guān)于多傳感器融合在功能安全方面的作用,他認為,異構(gòu)冗余才能使自動駕駛定位系統(tǒng)的可靠性得到有效提升。

圖:多傳感器融合在功能安全方面作用不同
他說:“汽車中很多零部件不能說誰有多好,都是各有所長,三個臭皮匠頂一個諸葛亮,汽車基本還是異構(gòu)冗余,互相備份去實現(xiàn)非常精采的功能。”
全天候能力或保“萬無一失”
開車過程中經(jīng)常遇到一些復雜的天氣情況,如大雨、大霧、沙塵、強光、夜晚,這對于視覺和激光雷達都是非常惡劣的場景,難以用一種傳感器應對,因為一類傳感器無法處理所有場景。像一些自動駕駛測試或比較成熟廠商的智能駕駛中多次發(fā)生撞車事故,傳感器系統(tǒng)的失效付出了慘痛代價。所以,傳感器融合是構(gòu)建穩(wěn)定感知系統(tǒng)的必要條件。

圖:多傳感器融合是穩(wěn)定感知的必要條件
蘇州豪米波董事長白杰解釋說,傳感器融合首先要根據(jù)來自不同傳感器的數(shù)據(jù)和狀態(tài)估計結(jié)果,利用不同傳感器,如視覺、激光雷達、毫米波雷達等,將數(shù)據(jù)融合到中央處理器實現(xiàn)信息互補,以得到最佳的平衡方案。根據(jù)中央處理器獲取的傳感器信息層次的不同可以分為:數(shù)據(jù)級范疇的原始信息、特征級范疇的處理后的特征識別,以及決策級融合的危險估計及最終決策。
整個過程是將毫米波雷達、圖像雷達數(shù)據(jù)進行預處理和特征提取,得到目標位置信息和分類信息,之后送到處理器中進行綜合分析判斷,得到特征向量和特征矩陣,以實現(xiàn)決策級融合。
數(shù)據(jù)級融合是將所有原始數(shù)據(jù)送到處理器,數(shù)據(jù)同步后進行處理。目前的方案主要是目標級,未來的發(fā)展是多級特征融合方案。由于數(shù)據(jù)量特別大,數(shù)據(jù)級融合受制于域控制器或帶寬限制,也是一個算力瓶頸。
從傳感器數(shù)據(jù)處理來看,主要分為集中式、分布式、混合式結(jié)構(gòu)。
集中式結(jié)構(gòu):將傳感器所有信息送到域控制器中進行數(shù)據(jù)關(guān)聯(lián)、量測融合、目標跟蹤,得到目標、位置、狀態(tài)信息,最后進行決策。其優(yōu)點是數(shù)據(jù)處理精度高;缺點是大量數(shù)據(jù)易造成通信負載過大,對域控制器處理性能要求高。
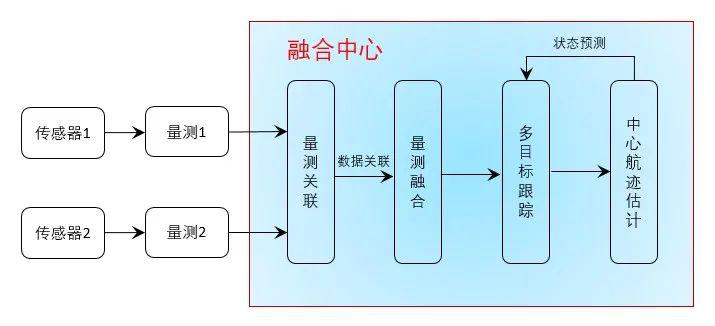
圖:集中式結(jié)構(gòu)
分布式結(jié)構(gòu):每個傳感器將目標觀測結(jié)果在本地進行檢測與跟蹤處理,完成局部航跡信息后送入域控制器。優(yōu)點是通信帶寬需求低,計算速度快;缺點是跟蹤精度遠沒有集中式高。
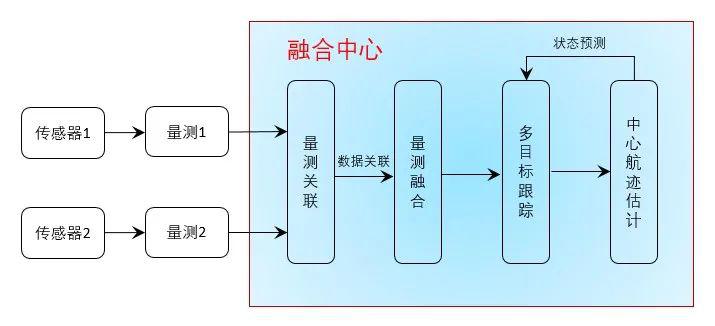
圖:分布式結(jié)構(gòu)
混合式結(jié)構(gòu):根據(jù)對數(shù)據(jù)需求的不同組成混搭傳感器,兼具集中式和分布式結(jié)構(gòu)的優(yōu)點,彌補了兩者不足。
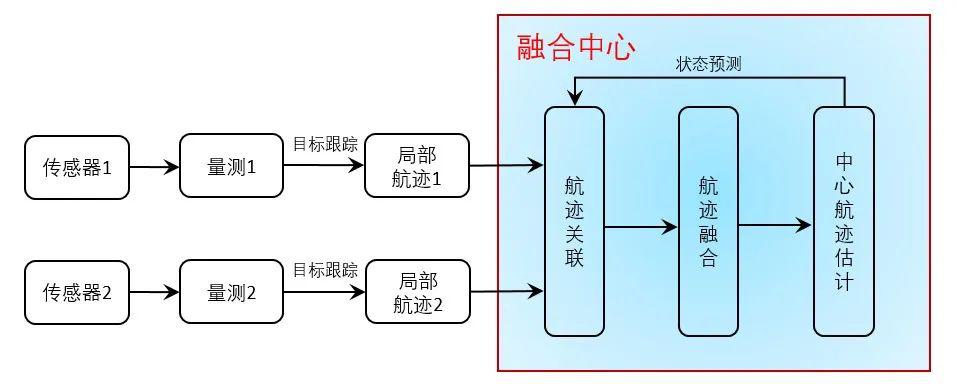
圖:混合式結(jié)構(gòu)
目前大部分廠商采用混合式結(jié)構(gòu),采用攝像頭和雷達融合的前沿方法,由分布式傳感器分別進行數(shù)據(jù)處理,得到目標信息列表后再進行融合。
白杰表示,最近兩年深度學習研究比較火熱,出現(xiàn)了一些前沿的融合跟蹤方案:普通雷達點云+攝像頭、雷達射頻圖像+攝像頭,以及4D雷達點云+攝像頭。
他認為,目前大多數(shù)傳感器融合方法都使用激光雷達和攝像頭,從而實現(xiàn)高精度3D目標檢測。但是,這種方法有其局限性,攝像頭和激光雷達對不利天氣(如雪、霧、雨)都很敏感、對遠處目標檢測精度低,且激光雷達成本較高,要普及還有一定困難。由于雷達對惡劣天氣有很好的魯棒性,探測距離非常遠,能精確測量目標速度且成本低,在自動駕駛中越來越受到人們的重視。
雷達數(shù)據(jù)雖然比較稀疏,不能直接套用激光雷達的方法,數(shù)據(jù)在輸入層和后處理部分的融合不能獲得很好效果,但每個點都包含很多信息,在融合中能起到很大作用。
他說,對攝像頭圖像數(shù)據(jù)和雷達點云數(shù)據(jù)進行中間特征層融合,就可以實現(xiàn)精確的3D目標檢測。在進行融合之前,由于目前雷達的高度信息不準確,無法很好與圖片目標進行關(guān)聯(lián),因此需要先對雷達點云進行預處理,采用支柱擴張的預處理方法,將每個雷達點云擴張成一個固定大小的支柱,若支柱中的一部分進入了關(guān)聯(lián)ROI(感興趣區(qū)域)內(nèi),就可以實現(xiàn)雷達點云與攝像頭之間的關(guān)聯(lián)及融合。另外,目前4D毫米波雷達已開始逐步進入市場,因其每個目標有更豐富的點云,肯定會在L4系統(tǒng)中發(fā)揮更重要的作用,大大提升毫米波雷達的感知地位。
MEMS激光雷達有望批量應用
特斯拉只使用攝像頭,難免有些場景(如純白或純色)難以識別,而激光雷達可以把距離、速度等各種信息都很快計算出來,通過算法實現(xiàn)環(huán)境識別,而且現(xiàn)在分辨率已經(jīng)足夠高了。以往的機械式雷達是一個轉(zhuǎn)臺上的激光探測器,現(xiàn)在谷歌、百度等科技公司還在使用。其64線需要64組激光器和探測器一一對應,然后供電讓它轉(zhuǎn)起來,是非常復雜的光學和電學系統(tǒng),不利于大規(guī)模量產(chǎn)。
中國科學院蘇州納米技術(shù)與納米仿生研究所沈文江博士說:“激光雷達是自動駕駛中用到的眾多傳感器之一。與其他傳感器比,目前的MEMS激光雷達的每秒點云數(shù)據(jù)量在100萬左右,比圖像還是小得多,對處理器算力的要求沒有那么高。”
他表示,與機械式相比,MEMS激光雷達的優(yōu)勢很多,如安裝簡單、體積更小、價格便宜,最有希望在乘用車上普及。目前,其角度分辨率已達到0.2度,比如100米外的一輛車可以掃描到很多點,能夠計算并標示出車的輪廓。
只需要一個激光器和MEMS微鏡組合,MEMS激光雷達就能實現(xiàn)激光脈沖的掃描,裝配起來很簡單。從成本考慮,由于采用半導體工藝,量大了成本就會很便宜。另外,從分辨率考慮,MEMS激光雷達實現(xiàn)64線只需用微鏡把單個激光器發(fā)出的脈沖掃描點陣組成64條線就可以了,所以非常容易實現(xiàn)高分辨率,體積也非常小。未來MEMS激光雷達的成本有望控制在千元人民幣以內(nèi)。

圖:MEMS激光雷達
他還說,從全球總共5家激光雷達上市公司也可看出技術(shù)上的端倪,其中4家美國公司,1家以色列公司;1家仍是機械式,兩家用的是MEMS方案。所以MEMS方案得到了業(yè)界和投資界青睞。
更多信息可以來這里獲取==>>電子技術(shù)應用-AET<<
