
1 引言
MEMS(Micro Electro Mechanical System,即微機(jī)電系統(tǒng))是指集微型傳感器、執(zhí)行器以 及信號(hào)處理和控制電路、接口電路、通信和電源于一體的微型機(jī)電系統(tǒng),具有體積小、重量 輕、性能穩(wěn)定、可大批量生產(chǎn)、性能一致性好、成本低等特點(diǎn),將MEMS器件——加速度傳 感器應(yīng)用于輸入產(chǎn)品和嵌入式系統(tǒng),滿足它們對(duì)傾斜、運(yùn)動(dòng)、定位、振動(dòng)等微小變化的測量 需求,以MEMS替換機(jī)械控制部件,為消費(fèi)產(chǎn)品帶來了一場革新。
國外和港臺(tái)地區(qū)有一些單位正在開展這方面的研究,并取得了一定的成績。例如:香港 中文大學(xué)Alan H. F. Lam等幾個(gè)博士生提出了一種基于微加速度傳感器的虛擬鍵盤鼠標(biāo)系統(tǒng) (MIDS),能同時(shí)具備鼠標(biāo)和鍵盤的功能[1];加州大學(xué)伯克利分校設(shè)計(jì)了一種加速度感應(yīng)手 套,利用放置在手指上的二維加速度傳感器感測手和手指的動(dòng)作,實(shí)現(xiàn)電腦輸入的功能[2]。
2. 系統(tǒng)設(shè)計(jì)
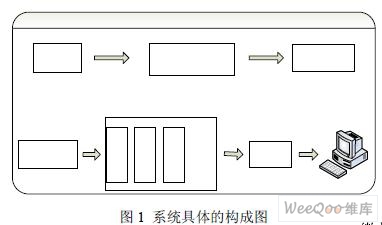
本文設(shè)計(jì)的無線輸入系統(tǒng)是以加速度計(jì)為敏感元件,來完成鼠標(biāo)的功能,并能夠在三維 空間上同步操作者的三維運(yùn)動(dòng),從而實(shí)現(xiàn)電腦輸入的目的。本文采用美國AD公司的微加速 度傳感器ADXL203,并結(jié)合Nordic半導(dǎo)體公司的射頻收發(fā)器NRF2401,與Philips公司的 D12USB接口芯片形成一個(gè)硬件體系。該系統(tǒng)由兩個(gè)子系統(tǒng)組成:遠(yuǎn)端子系統(tǒng)和主機(jī)端子系 統(tǒng),具體的構(gòu)成如圖1所示。
在軟件開發(fā)上,采用 ARM 嵌入式系統(tǒng)的開發(fā)理念,采用內(nèi)置有ARM7 處理器核的 LPC2214 微控制器,開發(fā)新一代基于微加速度傳感器的MEMS 無線輸入設(shè)備。在調(diào)試初期, 以周立功公司的EasyARM2200 開發(fā)板為開發(fā)平臺(tái),使用ADS 作為開發(fā)環(huán)境。
2.遠(yuǎn)端子系統(tǒng)設(shè)計(jì)
遠(yuǎn)端子系統(tǒng)的主要任務(wù)是加速度計(jì)信號(hào)的采集,信號(hào)的放大、濾波等的處理,控制器 對(duì)射頻無線發(fā)送的軟件控制。主要的實(shí)現(xiàn)過程為:使用GPIO 口,并按照一定的采樣頻率將 加速度信號(hào)送入微控制器LPC2214,在LPC2214 內(nèi)部進(jìn)行信號(hào)放大和A/D 轉(zhuǎn)換;并且按照 無線傳輸模塊定義的格式將數(shù)據(jù)進(jìn)行編碼,再通過GPIO 口傳送給無線射頻模塊。 主程序主要實(shí)現(xiàn)各個(gè)器件的初始化和任務(wù)的調(diào)用。
int main(void)
{
TargetInit();
Init_RF();
Init_ADC();
Init_Transmitter();
TaskMouse();
return 0;
}
在完成各個(gè)模塊的初始化之后,執(zhí)行Taskmouse 函數(shù)。Taskmouse 函數(shù)是主執(zhí)行函數(shù), 包含了GetMousePos()、ModeSelect()、Get_ADCValue_X()和Get_ADCValue_Y()等子函數(shù)。 調(diào)用該函數(shù)就可以執(zhí)行加速度計(jì)信號(hào)采集、鼠標(biāo)位置確定、系統(tǒng)工作模式選擇等程序行。 獲取鼠標(biāo)位置信息的示意程序如下所示:
void GetMousePos(uint8 *buf, uint8 shift)
{
uint8 i;
uint8 sampf = 50;
uint32 dpi = 100;
uint32 sum_x, sum_y;
sum_x = sum_y = 0;
for (i = 0; i < sampf; ++i) {
sum_x += Get_ADCValue_X(dpi);
sum_y += Get_ADCValue_Y(dpi); }
buf[0] = (sum_x / sampf) >> shift;
buf[1] = (sum_y / sampf) >> shift;
}
3.主機(jī)端子系統(tǒng)設(shè)計(jì)
在主機(jī)端子系統(tǒng)中,NRF2401 接受遠(yuǎn)端子系統(tǒng)的數(shù)據(jù)并從I/O 口進(jìn)入LPC2214,數(shù)據(jù)通 過協(xié)議等處理為鼠標(biāo)格式,最后通過USB 接口發(fā)送給主機(jī)。在該模塊中,我們采用了操作 系統(tǒng)來實(shí)現(xiàn)多任務(wù)處理。
3.1 μC/OS-II 操作系統(tǒng)的移植
我們使用的 μC/OS-II 是一個(gè)完整、可移植、可固化、可剪裁的占先式實(shí)時(shí)多任務(wù)的實(shí) 時(shí)操作系統(tǒng)內(nèi)核,使用標(biāo)準(zhǔn)的ANSIC 語言編寫, 并包含一段匯編語言代碼,被廣泛地應(yīng)用 于各種架構(gòu)的微處理器上。
在本系統(tǒng)中,μC/OS-II 的移植主要是修改3 個(gè)與ARM 處理器體系結(jié)構(gòu)相關(guān)的文件: OS_CPU.H、OS_CPU.C 和OS_CPU_A.ASM。OS_CPU.H 文件為系統(tǒng)通用量設(shè)置的移植文 件,采用C 語言描述。包含數(shù)據(jù)類型定義、堆棧單位、堆棧增長方向和宏定義,需根據(jù)處 理器進(jìn)行相應(yīng)修改;OS_CPU.C 文件為系統(tǒng)管理代碼的移植文件, 采用C 語言描述; OS_CPU_A.ASM 文件為處理器相關(guān)代碼的移植文件, 采用ARM 的匯編語言描述。
3.2 控制器編程
將操作系統(tǒng)成功移植到LPC2214 上后,就可以對(duì)主機(jī)端系統(tǒng)進(jìn)行軟件設(shè)計(jì)。下面是主 機(jī)端主函數(shù)的代碼:
int main (void)
{
OSInit();
OSTaskCreate(TaskStart, (void *)0, &TaskStartStk[127], 5);
OSStart();
}
主函數(shù)首先對(duì)操作系統(tǒng)進(jìn)行初始化,初始化完成后,創(chuàng)建啟動(dòng)任務(wù),設(shè)置任務(wù)的優(yōu)先級(jí), 并開始進(jìn)行多任務(wù)操作。啟動(dòng)任務(wù)TaskStart 主要完成各個(gè)模塊的初始化,包括開發(fā)板的初 始化TargetInit(),射頻芯片的初始化Init_RF(),控制器AD 轉(zhuǎn)換的初始化Init_ADC(),USB 接口芯片的初始化Init_D12()等,并將射頻無線接受設(shè)置為接收模式。最后調(diào)用主執(zhí)行函數(shù) TaskDisplay()進(jìn)行任務(wù)處理。
3.3 USB 編程
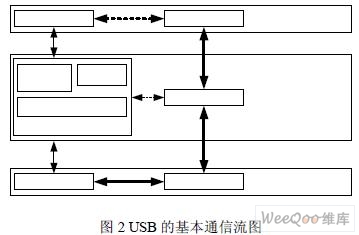
在主機(jī)端軟件設(shè)計(jì)中,USB接口設(shè)計(jì)是非常重要的一環(huán)。USB接口,即通用串行總線。 這是針對(duì)PC機(jī)外設(shè)的一種新型接口技術(shù),具有終端用戶使用方便、應(yīng)用性廣泛、能同步傳 輸寬帶、靈活性強(qiáng)和實(shí)現(xiàn)成本低等特性。USB的基本通信流和分層模型如圖2所示。
為簡化USB 設(shè)備的開發(fā)過程,USB 提出了設(shè)備類的概念。HID(Human Interface Device) 設(shè)備類,即人機(jī)接口設(shè)備。典型的HID 設(shè)備如鍵盤、鼠標(biāo)。客戶軟件可以直接使用操作系 統(tǒng)內(nèi)置的HID 設(shè)備類驅(qū)動(dòng)程序(hidclass.sys)和HID 小驅(qū)動(dòng)程序(hidusb.sys)與HID 設(shè)備進(jìn)行通信。
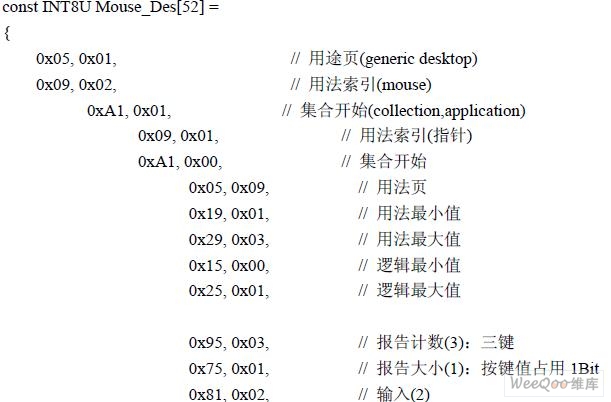
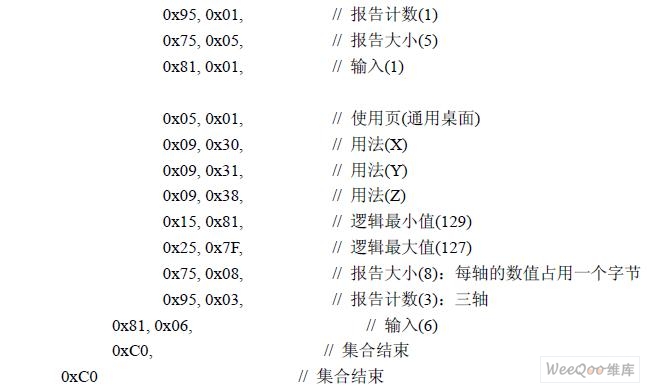
報(bào)告描述符用于提供HID 設(shè)備和主機(jī)間交換數(shù)據(jù)的格式。根據(jù)該輸入設(shè)備的實(shí)現(xiàn) 要求和系統(tǒng)定義的鼠標(biāo)協(xié)議格式,HID 類設(shè)備的報(bào)告描述符如下所示:
4 結(jié)束語
本文討論了基于MEMS的無線輸入設(shè)備,主要介紹了在嵌入式環(huán)境下,輸入設(shè)備的固件 編程設(shè)計(jì)。本文將系統(tǒng)分成兩個(gè)子系統(tǒng),并對(duì)他們進(jìn)行分別介紹,給出了子系統(tǒng)的簡單實(shí)現(xiàn) 流程和函數(shù)的調(diào)用,并列出了一部分程序行。此方案的子程序具有易移植性,很容易在其他 領(lǐng)域中使用。
基于MEMS的無線輸入設(shè)備,其主要部件依托MEMS表面微加工和體硅加工的特殊工 藝,使系統(tǒng)在尺寸、性能等方面有了提高,并且作為輸入設(shè)備發(fā)展的新形式,減少了設(shè)備之 間連線的繁瑣,擴(kuò)大了其使用的空間。隨著信息技術(shù)和MEMS技術(shù)的繼續(xù)發(fā)展,基于MEMS 技術(shù)的無線輸入設(shè)備會(huì)更加可靠、方便。
本文創(chuàng)新點(diǎn):提出了基于MEMS器件的電腦輸入模型,將ARM7和μC/OS-II操作系統(tǒng)相 結(jié)合,應(yīng)用于輸入系統(tǒng),并完成了樣機(jī)的程序?qū)崿F(xiàn)。