
引言
隨著社會經(jīng)濟(jì)發(fā)展,城市交通和基礎(chǔ)設(shè)施的不斷進(jìn)步,人們對安全的要求不斷提高,視頻監(jiān)控系統(tǒng)已經(jīng)廣泛用于小區(qū)安全監(jiān)控、火警監(jiān)控、流量控制以及軍事、銀行、商場、機(jī)場、地鐵等公共場所的安全防范。近年來,數(shù)字視頻監(jiān)控正以其無可比擬的優(yōu)勢逐漸取代模擬視頻監(jiān)控,為用戶提供更安全、更智能化的視頻監(jiān)控服務(wù)。智能監(jiān)控向網(wǎng)絡(luò)化,智能化,數(shù)字化發(fā)展。目前最先進(jìn)的數(shù)字視頻監(jiān)控系統(tǒng)已經(jīng)具有智能化分析功能,以計算機(jī)圖像處理技術(shù)為基礎(chǔ),對實時場景中的目標(biāo)進(jìn)行檢測、識別、跟蹤分析,并在此基礎(chǔ)之上進(jìn)行行為理解分析,從而代替或者部分代替人類進(jìn)行監(jiān)視活動。
近年來,視頻監(jiān)控系統(tǒng)平臺的設(shè)計層出不窮,而少有系統(tǒng)架構(gòu)設(shè)計層面的介紹。國內(nèi)外較為常見的系統(tǒng)設(shè)計,一種是使用PC機(jī)作為算法運行的硬件平臺,如 Morita等采用的C/S結(jié)構(gòu)[1]或Dias等采用的分布式結(jié)構(gòu)[2]。這種系統(tǒng)的主要缺點是成本高,由于PC對數(shù)字圖像處理不易優(yōu)化,智能算法很難達(dá)到實時要求。另一種使用專門數(shù)字圖像處理器構(gòu)建硬件平臺。這種系統(tǒng)的最大不足在于隨著系統(tǒng)規(guī)模擴(kuò)大、信息量增多,加大了服務(wù)器負(fù)擔(dān),進(jìn)而影響了整個系統(tǒng)。
在算法研究上,視頻監(jiān)控關(guān)鍵技術(shù)包括:背景建立,動目標(biāo)檢測,動目標(biāo)提取與跟蹤,動目標(biāo)智能分析。其中背景建立和動目標(biāo)檢測是關(guān)鍵技術(shù)中的基礎(chǔ),其實現(xiàn)的好壞直接影響監(jiān)控效果。目前較常見的算法有:幀間差分法[3],背景差分法[4],光流法[5]等。已有很多仿真工作見報道,但是較少有系統(tǒng)實現(xiàn)了的基于數(shù)字信號處理器DSP的嵌入式實時處理。
本文設(shè)計的視頻監(jiān)控系統(tǒng)遵循數(shù)字化、網(wǎng)絡(luò)化和智能化的發(fā)展趨勢,綜合考慮對上述不足進(jìn)行改進(jìn),可以使用普通模擬攝像頭作為視頻源進(jìn)行本地實時智能監(jiān)控,也可以使用網(wǎng)絡(luò)攝像機(jī)作為視頻源進(jìn)行遠(yuǎn)程實時智能監(jiān)控。在算法上較好地解決了監(jiān)控算法背景更新,動目標(biāo)檢測等關(guān)鍵技術(shù)。提出并實現(xiàn)了對可疑物報警、對貴重物體丟失報警等算法。

系統(tǒng)設(shè)計
系統(tǒng)硬件
本系統(tǒng)的硬件由多塊自行開發(fā)的數(shù)字信號處理(DSP)板卡組成,主要提供對本地和遠(yuǎn)程視頻監(jiān)控的硬件支持。每塊DSP板卡包括:基于 TMS320DM642(TI多媒體數(shù)字信號處理DSP芯片,下文簡稱DM642)核心處理模塊,外設(shè)存儲器模塊,總線控制模塊,模擬視頻輸入模塊, PCI模塊。系統(tǒng)硬件框圖如圖1。
系統(tǒng)軟件
·DSP端軟件
DSP板卡運行多通道的智能監(jiān)控算法,算法以庫形式提供。軟件構(gòu)架則以算法庫為核心、DSP/BIOS[6]和RF5[7]為框架進(jìn)行構(gòu)建。 DSP/BIOS是TI公司提出的高度優(yōu)化、可裁剪的DSP實時操作系統(tǒng)內(nèi)核,提供了搶占式的線程調(diào)度,內(nèi)存管理,外設(shè)管理和可視化的調(diào)試工具等特性。 RF5是一種基于DSP/BIOS的DSP軟件框架,提供了內(nèi)存管理策略,線程模型,通道封裝和算法管理。一臺服務(wù)器主機(jī)中可以安裝5張獨立的DSP板卡。
DSP軟件包括自啟動、初始化、和線程創(chuàng)建,流程如圖2所示。
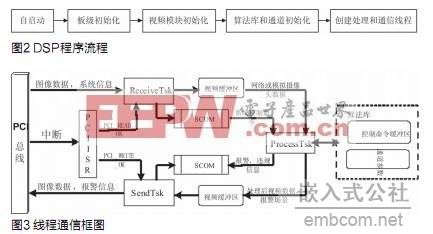
圖2中第五步動態(tài)創(chuàng)建了1個算法處理線程(ProcessTsk)、2個PCI通信線程(SendTsk,ReceiveTsk)以及一個中斷服務(wù)子程序(PCI_ISR):ProcessTsk根據(jù)客戶端為每個通道設(shè)定的監(jiān)控規(guī)則,對通道中的圖像進(jìn)行算法分析,若有目標(biāo)違規(guī),則記錄違規(guī)場景,產(chǎn)生報警信息,否則送出原始圖像。SendTsk負(fù)責(zé)把ProcessTsk產(chǎn)生的報警信息或者圖像通過PCI傳輸?shù)絇C端;ReceiveTsk負(fù)責(zé)接收來自本地板卡的模擬攝像頭和來自PC端的網(wǎng)絡(luò)攝像頭圖像,以及PC端來的信息。并傳遞給ProcessTsk;PCI_ISR負(fù)責(zé)監(jiān)聽來自PC端的請求,根據(jù)不同請求發(fā)送不同的旗語,控制線程間的運行。
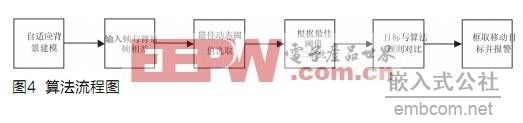
主機(jī)服務(wù)器準(zhǔn)備傳輸控制命令或者圖像的時候,向DSP發(fā)送中斷請求。PCI_ISR將響應(yīng)這些請求,根據(jù)主機(jī)服務(wù)器的不同信息向其他線程發(fā)送不同的控制旗語:如果是PC端接收一幀圖像完畢,則向SendTsk 發(fā)旗語PCI_READ_OK,表示可以接收下一幀圖像;如果是斷開、連接通道請求,則向ReceiveTsk發(fā)送旗語PCI_WRITE_OK,表示可以接收信息。ReceiveTsk接收網(wǎng)絡(luò)攝像機(jī)或者模擬攝像機(jī)圖像和控制命令。如果收到圖像,將其存儲在SDRAM的一個緩沖區(qū)中,以待進(jìn)行算法分析; 如果收到控制命令,將其存儲在由PC、DSP共同維護(hù)的一個緩沖區(qū)中。然后發(fā)起SCOM通信,把信息傳送到ProcessTsk維護(hù)的SCOM中。 SCOM是RF5框架中的通信模塊,提供了隊列 (Queue)和旗語(Semaphore)的雙重功能。ProcessTsk收到信息后,會使用視頻緩沖區(qū)和控制命令緩沖區(qū)中的數(shù)據(jù)作為算法參數(shù)進(jìn)行計算。ProcessTsk計算完成后,會產(chǎn)生相應(yīng)的結(jié)果,比如警報或者處理信息。這些數(shù)據(jù)會保存在一個字節(jié)數(shù)組中,然后將其打包封裝成一個Message 對象,將其發(fā)送到SendTsk維護(hù)的SCOM中,SendTsk接收到這個Message包后,對其進(jìn)行相應(yīng)的處理,然后發(fā)送到PC主機(jī)。線程通信如圖 3所示。
·PC端軟件
在服務(wù)器主機(jī)端,主要實現(xiàn)三個功能:(1)接收來自網(wǎng)絡(luò)攝像頭的視頻流并解碼,對應(yīng)模塊為網(wǎng)絡(luò)攝像機(jī)模塊;(2)構(gòu)建用戶界面,即客戶端模塊,記錄用戶算法設(shè)置、控制命令等,用戶可以根據(jù)自己的需求在規(guī)則設(shè)置界面中對特定的通道設(shè)置算法參數(shù)和控制命令等;(3)將圖像數(shù)據(jù)和算法參數(shù)、控制命令傳給 DSP端,對應(yīng)模塊為后臺服務(wù)模塊。
算法設(shè)計與DSP實現(xiàn)
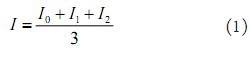
基于DM642的智能視頻監(jiān)控系統(tǒng)的核心是智能視頻監(jiān)控算法,本算法可以實現(xiàn)對監(jiān)控目標(biāo)物越線產(chǎn)生報警,對貴重物體消失產(chǎn)生報警,對可疑物體產(chǎn)生報警。算法原理:首先利用改進(jìn)的幀間差分法來初始化背景模型,得到自適應(yīng)背景圖像[9];然后把當(dāng)前圖像和背景圖像做差分運算;再使用動態(tài)閾值法對差值圖像二值化,引入形態(tài)學(xué)噪聲濾波器來消除噪聲影響[8];進(jìn)而使用快速二值圖像連通域標(biāo)記算法提取動目標(biāo);最后與用戶預(yù)先設(shè)置的警戒規(guī)則進(jìn)行比較,如有違規(guī),產(chǎn)生報警信息。算法流程如圖4所示。
自適應(yīng)背景模型建立
在運動目標(biāo)檢測過程中背景模型建立的準(zhǔn)確與否直接影響到目標(biāo)檢測結(jié)果的好壞。由于背景是個漸變的過程,所以采用了自適應(yīng)背景更新方法:在視頻圖像序列中先假設(shè)第一幀圖像為參考圖像I0,在隨后的圖像序列中找兩幀圖像I1和I2,要求運動部分在I0,I1以及I2中所占區(qū)域沒有重疊,將三幀圖像的灰度值平均得到圖像I:
將圖像I與I0進(jìn)行比較,如果差別較大(差值超出某一閾值T0),則為目標(biāo)區(qū)域,否則為背景區(qū)域;在目標(biāo)區(qū)域,進(jìn)一步判斷I1與I2的灰度值,如差別不大(差值小于某一閾值T1),則可用I1或I2中對應(yīng)區(qū)域作為背景對應(yīng)區(qū)域,否則用I0中對應(yīng)區(qū)域作為背景對應(yīng)區(qū)域,經(jīng)過這一替代,就可以得到一個不包含運動目標(biāo)的背景圖像Ib。然后用此參考圖像初始化背景圖像模型,公式如下:

差值圖像建立及二值化
自適應(yīng)背景BL產(chǎn)生后,每一幀視頻圖像將與BL差分,并得到差分后的差值圖像,進(jìn)而進(jìn)行二值化。在這一過程中,閾值選取的優(yōu)劣是二值化結(jié)果好壞的關(guān)鍵。本文采用動態(tài)閾值法進(jìn)行二值化處理。它的基本思想是對于需要二值化的每一幀差值圖像,確定一個最佳閾值,使圖像進(jìn)行二值化處理后,能方便而準(zhǔn)確的定位目標(biāo)物。具體過程如下。
設(shè)差值圖像灰度值取值分布范圍為1~K,像素總數(shù)為N,灰度為i的像素數(shù)為ni,則每個圖像灰度值的取值概率為:pi=ni/N。設(shè)以h為閾值將圖像分割為兩個區(qū)域A、B,灰度為1到h的像素和灰度為h+1到K的像素分別構(gòu)成區(qū)域A和B,各組產(chǎn)生的概率為:
6.jpg
以類間方差作為衡量分離性能的準(zhǔn)則,極大化的過程就是自動取定閾值的過程,因此,最佳閾值為: