作者:姚志樹(shù),徐順清,白雪飛
1 引言
在航空電源系統(tǒng)、電動(dòng)汽車(chē)等車(chē)載電源、艦載電源、蓄電池儲(chǔ)能等應(yīng)用場(chǎng)合,兩側(cè)都是直流電壓或直流有源負(fù)載,其中輸入端接直流母線,輸出端接儲(chǔ)能裝置(蓄電池)比較常見(jiàn)。此時(shí)為了實(shí)現(xiàn)充、放電,能量必須能夠雙向流動(dòng),因此就需要雙向DC/DC變換器。隨著科學(xué)技術(shù)的發(fā)展,雙向DC/DC變換器的應(yīng)用場(chǎng)合正在逐步擴(kuò)大,特別適用于需要對(duì)蓄電池進(jìn)行充/放電的場(chǎng)合。作為DC/DC變換器的一種新形式,雙向DC/DC變換器在工業(yè)應(yīng)用中的地位越來(lái)越突出。
現(xiàn)今開(kāi)關(guān)電源發(fā)展的趨勢(shì)是低電壓、大電流,這使得在次級(jí)整流電路中選用同步整流技術(shù)成為一種高效、低損耗的方法。雙向DC/DC變換器的設(shè)計(jì)主要考慮主電路拓?fù)溥x擇和控制方式選擇。在此介紹了一種由單端正激變換電路作主電路、C8051F020單片機(jī)作控制器的雙向DC/DC變換器的設(shè)計(jì)過(guò)程。該變換器應(yīng)用同步整流技術(shù),采用全數(shù)字控制,使得整個(gè)設(shè)計(jì)具有電路簡(jiǎn)潔、轉(zhuǎn)換效率高、控制簡(jiǎn)單、工作可靠、可實(shí)現(xiàn)能量雙向流動(dòng)等特點(diǎn)。通過(guò)PSPICE仿真及樣機(jī)的測(cè)試,驗(yàn)證了該方案的可行性。此變換器可用于各類(lèi)電池的充、放電及直流電源的核心部分。
2 主電路拓?fù)?br />
目前,應(yīng)用較多的雙向DC/DC變換器拓?fù)浣Y(jié)構(gòu)存在電路復(fù)雜、能量傳輸過(guò)程環(huán)節(jié)較多、變換器效率低、開(kāi)關(guān)管電壓難以抑制等缺點(diǎn)。單端正激變換器的電路較簡(jiǎn)單,是中、小功率電源中較常用的方式之一。圖1為所提出的雙向DC/DC變換器的主電路拓?fù)浣Y(jié)構(gòu)。
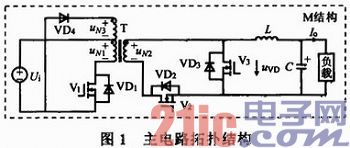
系統(tǒng)由變壓器T及其磁復(fù)位電路、主開(kāi)關(guān)管V1、整流管V2和續(xù)流管V3、輸出濾波電感L、電容C等部分組成。與同等功率等級(jí)的常見(jiàn)雙向DC/DC變換器相比,該拓?fù)渚哂薪Y(jié)構(gòu)簡(jiǎn)潔、系統(tǒng)成本低、工作效率高、控制方法簡(jiǎn)單等特點(diǎn),在工業(yè)應(yīng)用中具有一定優(yōu)勢(shì)。
2.1 正向工作過(guò)程分析
圖2為變換器正向工作電流連續(xù)時(shí)的主要波形。其工作過(guò)程分為4個(gè)階段。
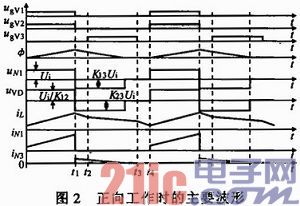
階段1[0,t1] V1和V2導(dǎo)通。t=0時(shí),V1導(dǎo)通,電源電壓Ui加在初級(jí)繞組N1上,即uN1=Ui,故鐵心磁化,鐵心磁通φ增長(zhǎng),即;N1dφ/dt =Ui。在此開(kāi)關(guān)模態(tài)中,φ增長(zhǎng)量為:
△φ(+)=UiDyTs/N1 (1)
變壓器的勵(lì)磁電流iM從零開(kāi)始線性增加,且iM=Uit/Lm,Lm為初級(jí)繞組的勵(lì)磁電感。則次級(jí)繞組N2上電壓為:
uN2=N2Ui/N1=Ui/K12 (2)
式中:K12為初、次級(jí)繞組的匝比,K12=N1/N2。
此時(shí)V2導(dǎo)通,V3截止,濾波電感電流iL線性增加,這與Buck變換器中開(kāi)關(guān)管導(dǎo)通時(shí)一樣,只是電壓為Ui/K12,且:diL/dt=(Ui/K12-Ui)/L。
階段2[t1,t2] V1處于關(guān)斷狀態(tài)。t1時(shí)刻,關(guān)斷V1,初、次級(jí)繞組中無(wú)電流流過(guò),此時(shí)變壓器通過(guò)復(fù)位繞組進(jìn)行磁復(fù)位,iM從復(fù)位繞組N3經(jīng)過(guò)VD4回饋到輸入電源。則復(fù)位繞組的電壓uN3=-Ui。這樣,初、次級(jí)繞組上的電壓分別為:uN1=-K13Ui,uN2=-K23Ui。K13為初級(jí)繞組與N3的匝比,K13=N1/N3;K23為次級(jí)繞組與N3的匝比,K23=N2/N3。此時(shí),V2,V3關(guān)斷,iL通過(guò)VD3續(xù)流。
階段3[t2,t3] V1仍處于關(guān)斷狀態(tài),V3導(dǎo)通,使得導(dǎo)通損耗大為降低,iL繼續(xù)經(jīng)過(guò)V3續(xù)流,此階段將持續(xù)到V3被觸發(fā)關(guān)斷時(shí)結(jié)束。
階段4[t3,t4] V3關(guān)斷,但其體二極管仍導(dǎo)通,該體二極管續(xù)流,所有繞組中均沒(méi)有電流,其電壓均為零。此階段直至V1被觸發(fā)導(dǎo)通時(shí)結(jié)束。至此,主電路的一個(gè)工作周期結(jié)束。
2.2 反向工作過(guò)程分析
電路反向工作時(shí)的工作過(guò)程與Boost電路基本一致,可分為兩個(gè)階段,其主要工作波形如圖3所示,此時(shí)V1不動(dòng)作。
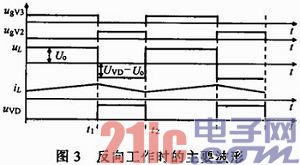
階段1[0,t1] V3導(dǎo)通,V2關(guān)斷,蓄電池放電,電流流過(guò)L,iL線性增加,直到t1時(shí)刻,iL達(dá)到最大值,電能以磁能形式儲(chǔ)存在L中。在V3導(dǎo)通期間,iL的增量為:
![]()
階段2[t1,t2] V3關(guān)斷,V2導(dǎo)通。L將其中磁能轉(zhuǎn)化為電能,與蓄電池一起向輸入側(cè)放電,iL線性衰減,直到t2時(shí)刻,iL到達(dá)最小值。在V3截止期間,iL的減小量為:
3 控制系統(tǒng)設(shè)計(jì)
3.1 控制系統(tǒng)結(jié)構(gòu)與主要硬件設(shè)計(jì)
雙向DC/DC變換器包括一個(gè)由功率元件組成的功率主回路、控制回路和驅(qū)動(dòng)電路等,見(jiàn)圖4。
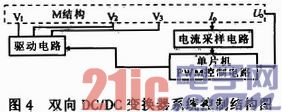
在此考慮到外接輸入信號(hào)可能對(duì)驅(qū)動(dòng)電路造成短路的問(wèn)題,采用集成電路驅(qū)動(dòng)形式,選用IR2110芯片。由于輸出電流不能直接被單片機(jī)獲得,需要通過(guò)設(shè)計(jì)電流檢測(cè)電路來(lái)準(zhǔn)確及時(shí)地測(cè)量電流值。在此采用UGN-3501M霍爾傳感器,它具有靈敏度高、工作溫度范圍寬(-20~85℃ )等特點(diǎn),檢測(cè)電路以集成AD522芯片為放大級(jí),AD522為雙端輸入、單端輸出的測(cè)量放大器,具有高輸入阻抗、線性度良好、準(zhǔn)確度較高等特點(diǎn)。
3.2 系統(tǒng)軟件設(shè)計(jì)
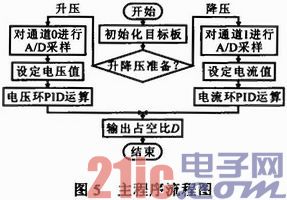
系統(tǒng)工作分為兩個(gè)過(guò)程:降壓變換和升壓變換。在降壓變換中,對(duì)采樣電壓信號(hào)進(jìn)行A/D轉(zhuǎn)換,通過(guò)增量式數(shù)字PI算法調(diào)節(jié)占空比的大小,產(chǎn)生PWM波形,控制輸出端電壓。在升壓變換中,對(duì)采樣電流信號(hào)進(jìn)行A/D轉(zhuǎn)換,通過(guò)增量式數(shù)字PI算法調(diào)節(jié)占空比的大小,產(chǎn)生PWM波形,控制輸出端電流。主程序流程如圖5所示。
4 系統(tǒng)仿真分析
這里采用PSPICE對(duì)系統(tǒng)主電路進(jìn)行仿真。仿真參數(shù)為:輸入電壓400 V,輸出電壓2 V,電感14.2 μH,電容9 900 μF,開(kāi)關(guān)頻率55 kHz,變壓器變比170:3,最大占空比0.4,負(fù)載電阻1 kΩ,圖6示出仿真波形。
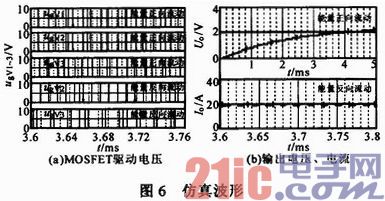
圖6a中自上至下分別為能量正向流動(dòng)時(shí)V1~V3驅(qū)動(dòng)電壓及反向流動(dòng)時(shí)V2,V3驅(qū)動(dòng)電壓波形。可見(jiàn),能量正向流動(dòng)時(shí),ugV1與ugV2同步產(chǎn)生,ugV2與ugV3形成互補(bǔ),并加有死區(qū)時(shí)間;反向流動(dòng)時(shí),V2和V3交替導(dǎo)通以保證能量正常傳輸,兩者也有重疊導(dǎo)通的時(shí)間來(lái)保證電流完成必要的換流。
圖6b為能量正向流動(dòng)時(shí)DC/DC變換器的輸出電壓Uo及能量反向流動(dòng)時(shí)輸出電流Io波形。可見(jiàn),系統(tǒng)電壓動(dòng)態(tài)響應(yīng)較好,實(shí)現(xiàn)了從400~2 V的能量轉(zhuǎn)換。當(dāng)變換器反向工作時(shí),蓄電池的輸出電流保持恒定,紋波較小,電感設(shè)計(jì)較為準(zhǔn)確。
5 實(shí)驗(yàn)分析
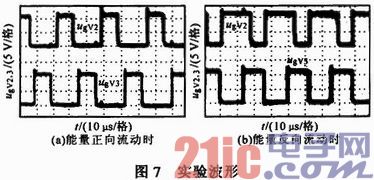
實(shí)驗(yàn)樣機(jī)主要元件選型和參數(shù)如下:V1根據(jù)輸入電壓為400 V等工作條件,采用型號(hào)為IXFN100N50P的功率MOSFET;V2,V3采用專(zhuān)門(mén)用于同步整流的MOSFET管IRL3803;儲(chǔ)能電感L=14.2 μH;輸出濾波電容為9 900 μF;負(fù)載為蓄電池。實(shí)驗(yàn)結(jié)果如圖7所示。圖7a為給蓄電池充電時(shí)V2和V3的PWM驅(qū)動(dòng)波形。由于此時(shí)V1與V2同步,因此可較明顯看出兩路驅(qū)動(dòng)信號(hào)形成互補(bǔ),并有死區(qū),與理論分析完全吻合。圖7b為能量反向流動(dòng)時(shí)V2和V3的PWM驅(qū)動(dòng)波形,此時(shí)V1不工作。由實(shí)驗(yàn)波形可見(jiàn),開(kāi)關(guān)頻率近似為55 kHz,PWM的占空比近似為0.4,實(shí)現(xiàn)了能量的雙向流動(dòng)。
6 結(jié)論
詳細(xì)介紹了一種基于單片機(jī)控制的雙向升降壓DC/DC變換器設(shè)計(jì)方案。通過(guò)仿真和實(shí)驗(yàn)分析,驗(yàn)證了該變換器方案的可行性,工作安全可靠且具有良好的電源特性。整個(gè)系統(tǒng)成本低,且采用全數(shù)字控制,硬件設(shè)計(jì)簡(jiǎn)單,可靠性較高,故對(duì)于需要能量雙向流動(dòng)控制的場(chǎng)合應(yīng)用較方便。
